多路精密超声波电动机驱动电源设计
2016-11-29 09:46:12岳惠峰李有光王新尧
微特电机 2016年3期
岳惠峰,李有光,王新尧
(南京航空航天大学, 南京 210000)
多路精密超声波电动机驱动电源设计
岳惠峰,李有光,王新尧
(南京航空航天大学, 南京 210000)
超声波电动机驱动电源以直接数字频率合成技术为基础,通过FPGA输出8路PWM信号,再经隔离,2个全桥逆变电路和滤波电路,产生两路可精密调节幅值、频率和相位差的正弦驱动电压。电源驱动频率范围19.8~50 kHz,频率分辨率为0.186 Hz;相位差调节范围0°~360°,相位分辨率最大为0.72°。该电源能为超声波电动机的控制提供保证。
超声波电动机电源;直接数字频率合成技术;调频;调相
0 引 言
超声波电动机是利用超声波振动作为驱动的新原理电机。自20世纪末以来,超声波电动机得到了迅速的发展和应用,在照相机、汽车、医疗设备、航空航天、机器人、微型机械等领域已经开始使用超声波电动机。超声波电动机作为一种新的驱动器,具有很多优良的性能,如低速下具有大转矩、无需减速装置直接驱动、动作响应快、运行无噪声、掉电自锁、无电磁干扰等[2-3]。驱动超声波电动机需要专门的驱动电源,要求电源输出电压的调频范围在超声范围之内,且输出的电压能调频、调相与调幅。
近几年国内对超声波电动机驱动电源的研究在快速发展。浙江大学的傅平等研制出以 DSP输出方波逆变方式工作的驱动电源,可以获得驱动超声波电动机所需的两相幅值、频率、相位可调的交变信号;哈尔滨工业大学的陈维山研制了一种基于DSP 的行波型超声波电动机的驱动与控制系统,该系统实现了电机在谐振频率点附近的频率自动跟踪、转速反馈控制等功能。上述超声波电动机驱动电源控制方法各有特点[4],电源输出的电压有调频、 调幅、调相的功能,实现对超声波电动机的速度和位置的控制。但上述驱动电源输出功率较小,输出电压可调范围小,调节精度不高,不能满足超声波电动机精确控制的要求。
为了解决上述电源中存在的精度低、调节范围小等问题,本文设计的精密超声驱动电源的信号源以DDS (Direct Digital Synthesize)[5-8]技术为基础,通过FPGA输出8路PWM波信号,输出8路PWM波信号的调频、调相精度高,调节范围广。同时驱动电源的功放电路采用全桥移相控制方式,这种控制方式的优点是在实现超声波电动机的调压控制时,避免了传统脉宽调制方式带来的当脉宽过窄时脉冲信号丢失的问题。
1 驱动电源设计的依据
超声波电动机工作频率很高,一般超声波电动机的工作频率在19.8~50 kHz,但是对于单个超声波电动机而言,其工作频率范围很窄,为保证电机能正常工作,要求电源输出电压的调频精度高,以满足电机驱动的需求。下面以自制的超声波电动机为例说明,自制的超声波电动机是一个纵弯复合型大功率旋转超声波电动机,由行波驱动,有4个振子。

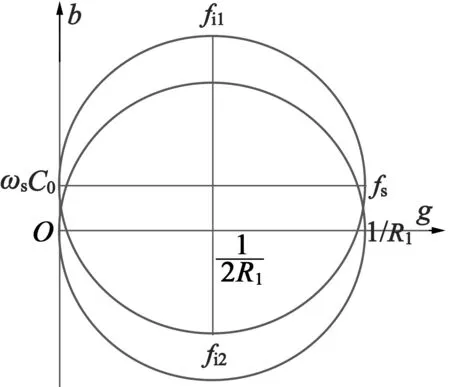
图1 超声波电动机导纳圆的理想图
用阻抗分析仪(4294A)来测量自制电机振子的阻抗特性,其中测量电压为1V,频率扫描范围为21.5~26kHz,取样点数为801个。测量出这801个点阻抗值,然后利用软件Origin画出振子纵振和弯振的导纳圆图,其中横坐标为电导g,纵坐标为电纳b。振子纵振的导纳圆实际图如图2所示,振子弯振的导纳圆实际图如图3所示。
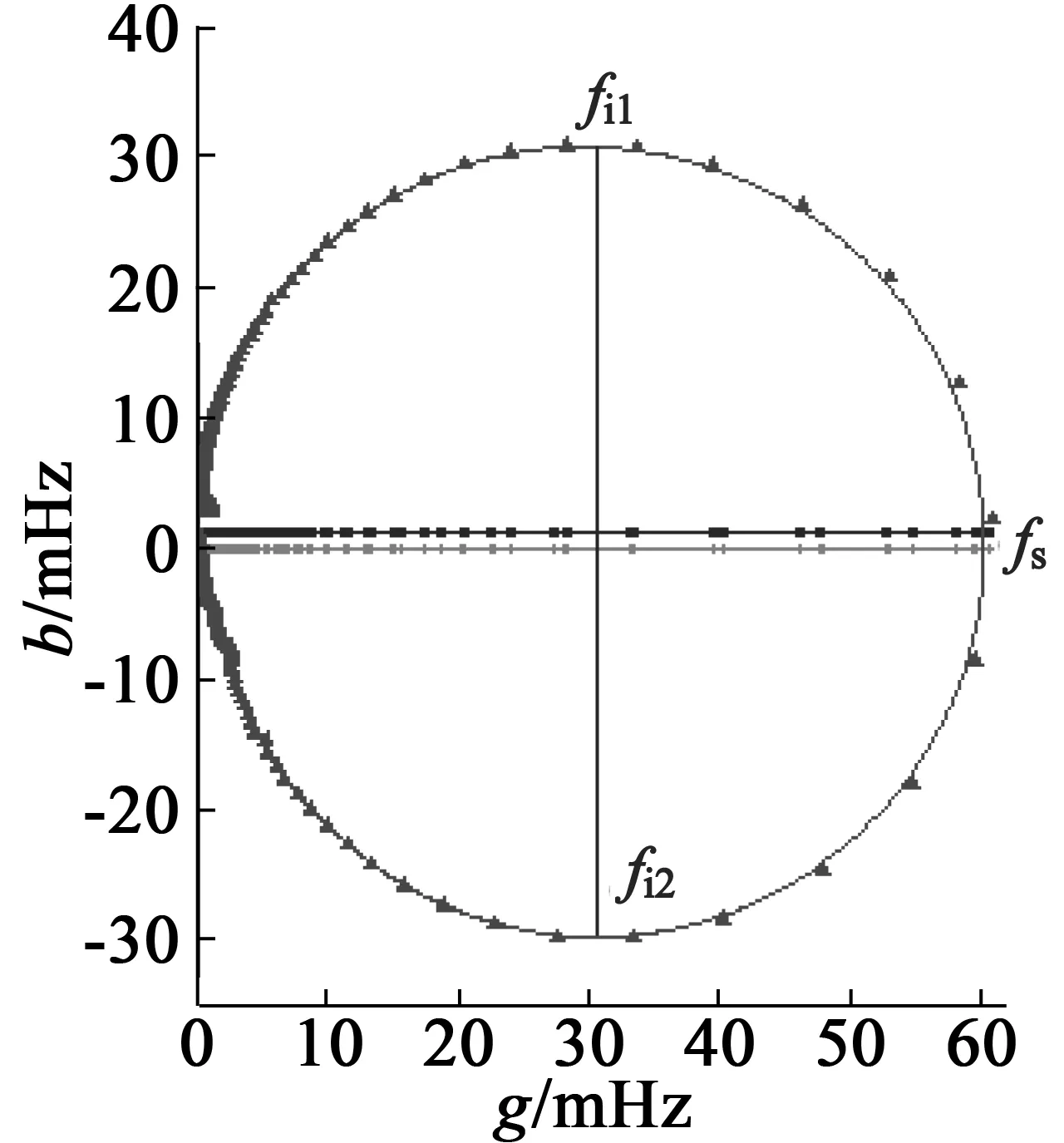
图2 振子纵振导纳圆

图3 振子弯振导纳圆
从图2和图3中可以得到超声波电动机的几个重要的频率点:fi1为上半功率点的频率,fi2为下半功率点的频率,fs为串联谐振频率点的频率。通过Origin软件可得到从导纳圆中各频率点的信息,如表1所示。

表1 振子的纵振和弯振各频率点的信息
超声波电动机振子是一个容性负载,电机加预紧力时,振子的阻抗特性会随着预紧力的增加而发生变化,因此电机的谐振频率也会发生变化,后面将继续研究这方面的问题,这里暂不作考虑。
超声波电动机工作在两个半功率点连线的右侧半圆上的频率点上时,串联支路的有功功率大于无功功率,该支路的工作效率η≥50%。通常超声波电动机工作频率稍大于串联谐振频率,所以从串联谐振频率到下半功率点的这1/4圆弧是比较理想的工作区域。
由表1可知,超声波电动机振子纵弯的下半功率点与串联谐振频率点的频率差为32Hz,弯振的下半功率点与串联谐振频率点的频率差为29Hz,自制超声波电动机工作频率范围很窄。为了保证电机正常工作,要求电源输出电压具有较高的调频精度。
2 驱动电源设计
2.1 电源的总体结构
设计的精密超声波电动机驱动电源的结构如图4所示。
通过获取来自PC机的不同类型的控制字,FPGA开发板输出4对8路可以调频、调相和调节死区时间的PWM波信号。这4对PWM波信号经光耦隔离、全桥逆变电路、变压器的电压变换与隔离,以及匹配电路滤波,得到2路可调频、调幅、调相的正弦驱动电压以驱动超声波电动机[10]。
2.2 信号源
由于电机的工作频率范围很窄,为准确找到电机正常工作频率,需要电源输出电压的调频精度高。信号源采用基于CycloneIV芯片EP4CE6E22C8的开发板进行设计与研究,该开发板采用50MHz的晶振。本文设计的累加寄存器为28位, 4个控制字(频率控制字,相位控制字(两个),死区时间控制字)均为 24位数。
PWM波的生成原理主要通过设置4个N位累加寄存器C1,C2,C3,C4,累加寄存器的初始值均为0。在每一个时钟脉冲下,累加寄存器累加一次,即累加寄存器的值加K (频率控制字),当累加器的值达2 N到时,累加器置零,完成一个周期,然后继续累加。调节频率控制字K,即可改变累加寄存器的累加次数,输出波形的频率f也改变。其PWM波生成的算法如图5所示。
由于设置了4个累加寄存器,每个寄存器的初始计数时间是可以调整的。以第一个累加寄存器C1的初始计数时间为基准,通过改变其它3个累加寄存器的初始计数时间,可改变输出4对PWM波的相位角。当累加寄存器C1达到K×H1时,累加存器C3开始计数;当C1计数到K×H2时,计数器C2开始计数;当C3计数到K×H2时,C4开始计数。移相控制字H1控制最后输出两路正弦波的相位差,而移相控制字H2(间接改变输出波形的占空比) 控制最后输出两路正弦波的幅值。

图5 PWM波生成的算法
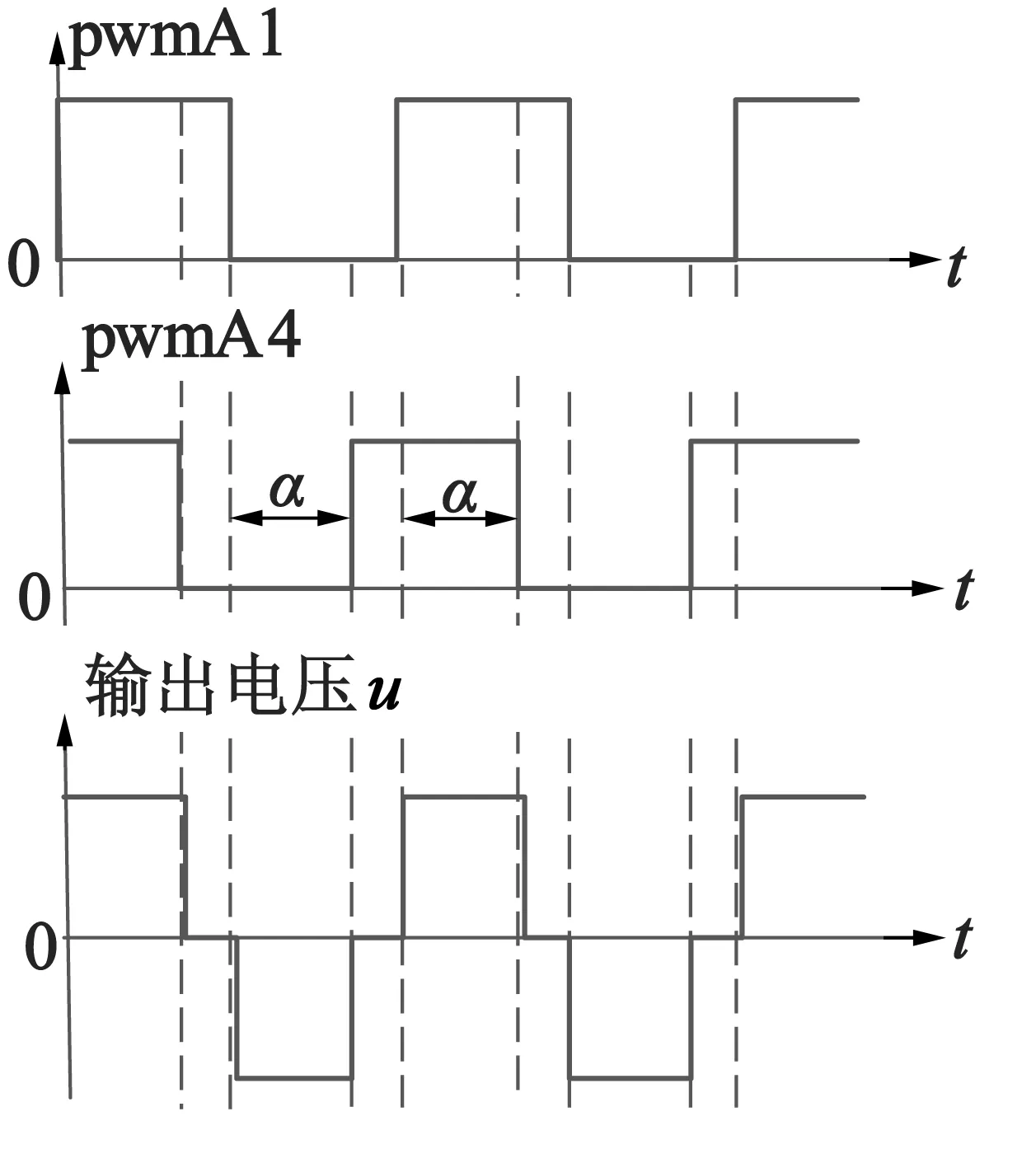
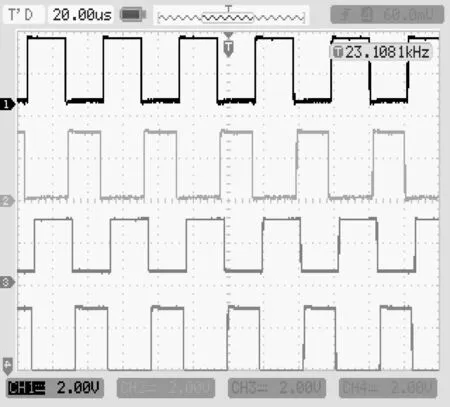
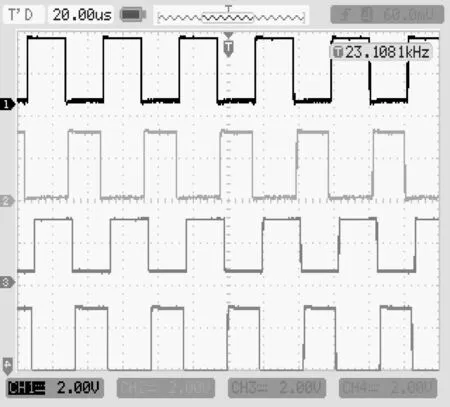
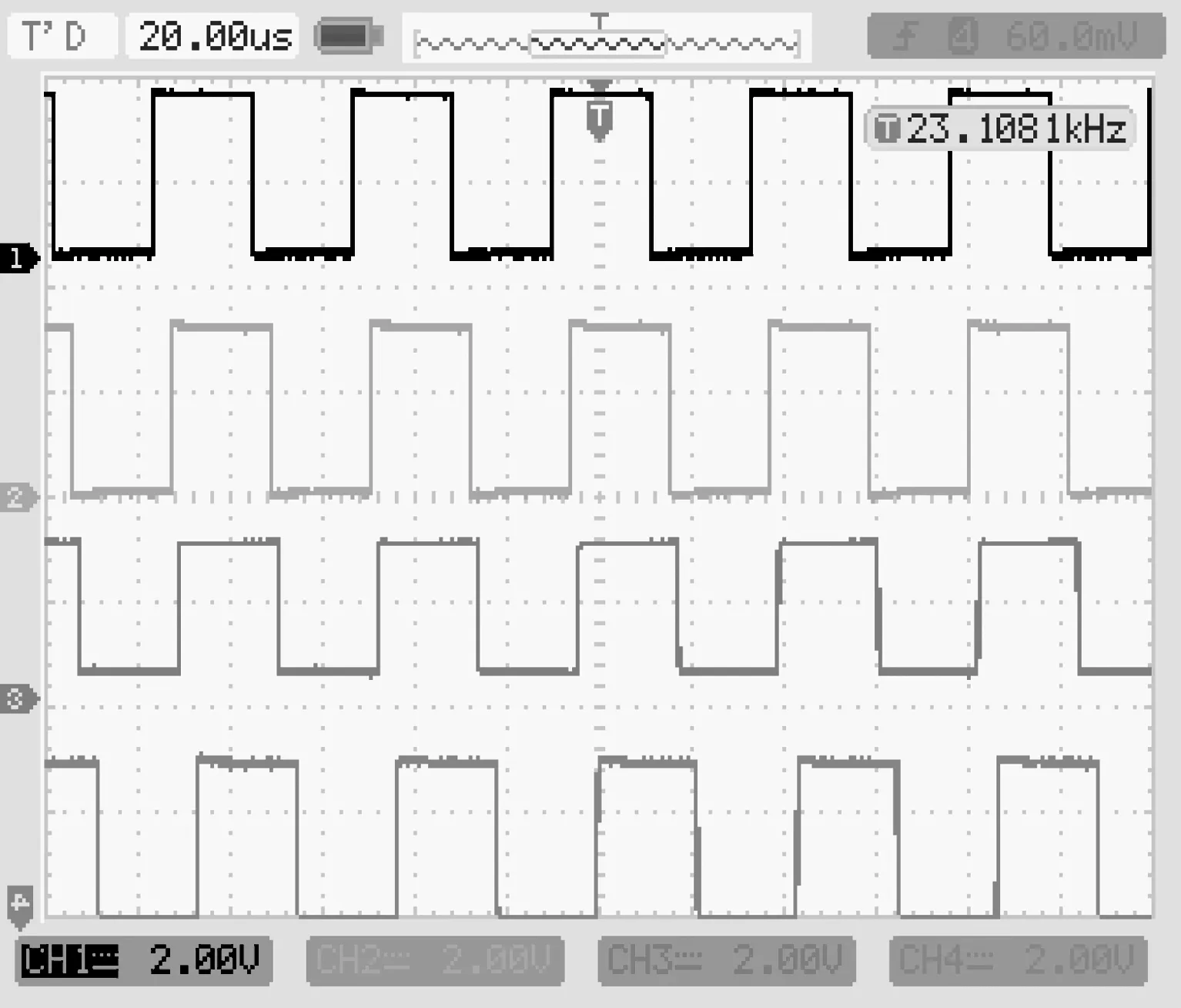
在累加寄存器累加过程中,累加寄存器值的范围为0~2N,以累加寄存器C1为例,将累加寄存器的值与2N-1进行比较。当C1<2N-1,pwm1输出高电平,pwm2输出低电平;当2N-1 PWM波输出信号的频率f和频率分辨率: (1) (2) 式中:f 为输出频率;K为频率控制字;N 为累加器的位数;fclk为时钟脉冲的频率。PWM波输出信号的相位差和相位分辨率: (3) (4) 式中:f为输出频率;H(H1,H2)为相位控制字;K为频率控制字;N为累加器的位数;fclk为时钟脉冲的频率。 PWM波输出信号的死区时间: (5) 式中:t为死区时间;T为死区时间控制字;fclk为时钟脉冲的频率。 由于频率控制字为24位数,累加寄存器为28位数,由式(1)、式(2)可知,信号源输出PWM波频率的最大值为3.125 MHz,频率分辨率为0.186 Hz。超声波电动机的工作频率一般在19.8~100 kHz,所以频率的调节范围控制在19.8~100 kHz范围内。根据式(3)可知,PWM波的调相范围很大,只要求相位调节范围在0°~360°之内即可。由式(3)、式(4)可知,PWM波的相位差和相位分辨率与频率(频率控制字)有关。本文用自制超声电动机进行实验,通过阻抗分析可知,振子弯振的串联谐振频率约为23.107 kHz,当f=23.108 kHz时,由式(4)可以算出输出PWM波信号的相位分辨率为0.17°。由式(5)可知,PWM波信号的初始死区时间为0.2 μs,死区时间分辨率为20 ns。 2.3 功放电路的设计 由于自制的超声波电动机功率比较大,驱动电源的功放电路采用2个全桥逆变电路,即A全桥与B全桥,功放电路如图6所示。从FPGA输出的8路PWM波信号pwm1~pwm8经过光耦隔离,由IR2110驱动后输出8路PWM波信号pwmA1~pwmB4。pwmA1~ pwmB4分别控制8个MOSFET开关管Q1~Q8。 图6 电源的功放电路 图6的电路采用全桥移相控制方法:所有MOSFET开关管的PWM控制信号占空比为50%,上、下桥臂开关器件的PWM信号互补。以A桥为例,通过调节MOSFET开关管Q1与Q4(或Q2与Q3)导通时间,即调节信号pwmA1与pwmA4(或pwmA2与pwmA3)的相位差α(调节移相控制字H2来实现),即可改变A桥输出电压脉冲的占空比,即变压器T1原边电压脉冲的占空比输出电压的幅值会改变,因此电机转速也会改变。移相控制信号的示意图如图7所示[11]。 图7 移相控制信号示意图 以DDS技术为基础设计的PWM信号发生器经过实验,得到需要的波形。在实验中,PC机与FPGA之间通过串口通信完成数据的传输。在PC机上利用串口调试助手,向FPGA写入32位数的控制字(分四次传输,一次传输8位数据),通过输入不同的控制字,实现输出波形频率、相位和死区时间的调节。 当K=24’h01E49C,H1=24’h0000CB,H2=24’h00012A,T=24’h000049(注:控制字为十六进制表示方式);当频率控制字K=24’h01E49C,通过式(4)可知,f=23.108kHz,此频率为自制电机振子弯振的串联谐振频率。实测的PWM波形频率23.1081kHz。输出的PWM波实测波形如图8所示。计算频率f=23.1080kHz,实测频率f=23.1081kHz,实际数据与理论数据存在一点偏差,但在误差允许的范围内,基本满足实验的需求。 (a) pwm1~pwm4实测波形 (b) pwm5~pwm8实测波形 (c) pwm1,pwm3,pwm5,pwm7实测波形 图8PWM实测波形 驱动电源的性能直接决定超声波电动机各项输出参数的质量。该新型驱动电源以DDS技术为基础,利用FPGA技术与全桥移相控制技术,使电源输出信号的频率分辨率为0.186Hz,相位分辨率最大为0.72°。调频精度、调相精度得到提高,同时输出信号的稳定性较好,频率和相位差的调节范围大,满足驱动和控制电机的要求。现阶段已完成信号发生器的研制与测试,功放电路的设计,振子研制与测试等,但电机整体还未组装,所以有些实验还未完成,如电机转速和扭矩的测量。后期任务是完成电机的组装,然后进行电机性能的测试,以验证该电源的性能,完成电源的改进工作。 [1] 姜楠,方光荣,刘俊标,等.国内外超声波电动机驱动技术的最新进展[J].微特电机,2005,33(9):38-39. [2]SASHIDAT,KENJOT.AnIntroductiontoUltrasonicMotors[M].UK:OxfordClarendonPress,1993:4-7. [3] 赵淳生.面向21 世纪的超声电机技术[J] .中国工程科学,2002,4(2):86-91. [4] 张文科. 超声波电机频率自动跟踪与负载匹配技术[D].广州:华南农业大学,2007:1-5. [5]TIERNEYJ,RADERCM.Adigitalfrequencysynthesizer[J].IEEETrans.onAudioandElectroacoustics,1971,19(1):48-57. [6] 姜楠,林云生,刘俊标.基于DDS的超声电机驱动电源的研究[J].电子器件,2007,30(1):109-115. [7] 周斌,李志钧,赵淳生.基于DDS的超声电机驱动电源[J].压电与声光,2002,24(3):202-204. [8] 王龙帅.基于DDS的超声波电机驱动控制研究[D]. 洛阳:河南科技大学,2009:6-12. [9] 罗凤玲,丁慎训,陈新业,等. 超声马达实验[J]. 大学物理,1995, 14(8):26-30. [10] 李有光,陈维山,陈在礼,等. 超声波电动机驱动电源研究[J]. 微特电机,2010,38(10):25-27. [11] 史敬灼. 超声波电机运动控制理论与技术[M].北京:科学出版社,2011:66-69. Research on Driving Power of Ultrasonic Motors YUE Hui-feng,LI You-guang,WANG Xin-yao (Nanjing University of Aeronautics and Astronautics,Nanjing 210000,China) The purpose of this article is to design a driving power for the self-made ultrasonic motor. The power was based on the direct digital frequency synthesis technology. 8-way PWM signals were put out from the FPGA and flow through the isolation, the 2 full-bridge inverter circuit and the filter circuit. After that, the PWM signals were converted into frequency control, phase shifted control and dead-time control of the two-phase sinusoidal driving voltage. The frequency range of power is 19.8~50 kHz, and the frequency resolution is 0.186 Hz; the phase range is 0°~360°, and the maximum resolution of phase is 0.72°. The power can provide a guarantee of control for the ultrasonic motor. driving power; DDS; frequency control; phase shifted control 何洪军,博士,研究方向为机器人整机及系统集成、感知系统和算法等。 2015-08-14 TM359.9 A 1004-7018(2016)03-0038-03
3 实验结果
4 结 语
猜你喜欢
能源工程(2021年5期)2021-11-20 05:50:42
中学生数理化·自主招生(2021年8期)2021-05-30 10:48:04
计算机应用(2020年5期)2020-06-07 07:06:44
数学物理学报(2018年1期)2018-03-26 08:16:58
单片机与嵌入式系统应用(2017年7期)2017-07-31 21:57:23
电测与仪表(2016年18期)2016-04-11 11:30:30
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
物理实验(2015年10期)2015-02-28 17:36:55
海军航空大学学报(2015年4期)2015-02-27 13:45:51