
基于人工鱼群-蛙跳神经网络的变压器故障诊断
2016-10-21 06:40乔维德
常熟理工学院学报 2016年4期
乔维德
(无锡开放大学,江苏无锡214011)
基于人工鱼群-蛙跳神经网络的变压器故障诊断
乔维德
(无锡开放大学,江苏无锡214011)
为提高电力变压器故障诊断的准确率,提出一种基于人工鱼群-蛙跳混合算法(AFSAFLA)优化的神经网络模型,并用于电力变压器的故障诊断.人工鱼群-蛙跳混合算法融合了人工鱼群算法前期全局收敛速度迅速以及蛙跳算法局部搜索能力强的优势,其运算速度和优化精度有了极大提升.仿真实验结果分析表明,该方法能对变压器各种类型故障加以有效诊断,故障诊断正确率高、速度快,能满足电力变压器故障诊断的实际工程需要.
变压器;人工鱼群算法;蛙跳算法;故障诊断
电力变压器为电网中极其重要的输变电设备,其安全与可靠运行直接影响着整个电力系统的安全性.一旦电力变压器在运行过程中发生故障,不仅可能造成电网的整体或局部瘫痪,而且还会带来惨重的安全事故和巨大的经济损失.所以,对电力变压器可能发生的故障类型进行预测诊断,可及时了解电力变压器的运行状态,并对变压器的维护和检修提供科学指导,及时排查并消除变压器故障及其安全隐患,降低变压器故障发生概率.电力变压器结构一般较为复杂,如何在变压器故障发生早期或潜伏期便能应用诊断技术加以诊断,一直是学者们关注和研究的课题.传统的诊断变压器故障方法有多种,其中的油中溶解气体分析(DGA)法已被广泛应用,DGA法比较适宜变压器的早期故障检测,并且受变压器结构变化的影响不大,但是DGA法存在编码不全、编码边界过于绝对等缺点,因此大大影响变压器故障诊断结果的准确率.伴随着人工智能及计算技术的迅速发展,电力变压器的故障诊断技术也进入崭新的智能化时代,智能技术为变压器故障诊断开拓了新思路和新途径,目前人们已将神经网络、遗传算法、蚁群算法、粒子群算法等用于变压器的智能故障诊断,但存在网络收敛速度缓慢甚至不收敛、易早熟、陷入局部最小点等局限性问题,从而影响变压器故障诊断准确率.鉴于上述问题,笔者提出将人工鱼群算法(AFSA)与蛙跳算法(FLA)两种仿生智能算法结合起来,组成人工鱼群-蛙跳混合算法(即AFSA-FLA),运用AFSA-FLA优化用于变压器故障诊断的神经网络结构参数模型,充分利用人工鱼群算法快速全局搜索和蛙跳算法较强局部搜索的能力,提高变压器故障诊断的速度和精度.
1 人工鱼群算法
人工鱼群算法(AFSA)最先由李晓磊等学者于2002年提出,它是模仿鱼群行为的一种随机优化算法,它是利用鱼群的觅食、聚群、追尾和随机等行为,通过鱼群中各个体的局部寻优实现对鱼群全局寻优的目标.该算法的数学模型为:如果一个n维水域搜寻空间中有N条人工鱼组成鱼群体,每条鱼的位置状态可设定为X=(x1,x2,…,xn),其中xi(i=1,2,…,n)为被优化参数.人工鱼当前位置的食物浓度设定Y=f(X),Y为待求的目标函数值;各条人工鱼位置间距设定为dij=|Xi—Xj|.用rang代表人工鱼感知区域范围,step表示人工鱼每次向目标位置游动的最大步长,λ为鱼群拥挤度因子;number为人工鱼每次觅食的最大试探次数[1].
1)觅食行为.觅食行为实质上就是人工鱼朝着食物浓度高的方向移动.假定第i条人工鱼当前位置是Xi,在这条鱼的可见范围内随机选取另一个位置Xj,比较两个位置的食物浓度即目标函数值Yi和Yj,当Yj>Yi时,那么人工鱼从当前位置Xi朝着食物量更多的位置Xj方向游动一步;如果Yj<Yi时,就继续随机选择下一个位置Xj,并按上述方法判别人工鱼是否满足向前游动的条件,假如连续经过number次最大尝试后还不能满足游动的位置条件,那么就执行人工鱼的随机行为.
2)随机行为.人工鱼在它的视野范围内随机游动,当看见食物时,朝着食物越来越多的方向位置快速游动,从而更新人工鱼的当前位置.其实随机行为也属于觅食行为的一种缺省和特殊行为.
3)聚群行为.假定当前人工鱼Xi在dij<rang的视野区域内,拥有其它人工鱼的数量为mf,可以测算人工鱼群的中心位置Xo为:

设定鱼群中第i条人工鱼位置Xi上的食物浓度为Yi,rang范围内人工鱼群中心位置Xo的食物浓度为Yo.如果Yi<Yo,同时Yo/mf>λYi,意味着此时rang区域中心位置Xo的食物量多、食物浓度大,而且中心位置附近不是很拥挤,此时人工鱼便从当前Xi位置朝着人工鱼群的中心位置Xo方向前进一步;如果Yo/mf<λYi,人工鱼便会采取觅食行为.
4)追尾行为.假定当前人工鱼位置为Xi,在当前鱼搜寻范围dij<rang的感知区域内,食物量(食物浓度)Yj(最多)最高时的人工鱼所处位置为Xj,如果Yi<Yj,同时Yj/mf>λYi,那么表示rang范围内人工鱼所处的Xj位置食物浓度高,且位置Xj附近不拥挤,因此,当前第i条人工鱼便朝着Xj位置方向游动一步;如果Yj/mf<λYi,人工鱼便会采取觅食行为.
5)公告板:将鱼群中最优的人工鱼位置及其对应的食物(量)浓度记录在公告板上.当人工鱼每进行一次位置更新后,便及时用更新位置后的食物浓度与公告板中记载的最优人工鱼食物浓度进行比较,如果比公告板中的食物浓度高,则用自身的位置与食物浓度更新公告板中内容,在算法迭代结束后,公告板中的输出值便是待求最优值.
对于人工鱼群算法中经过初始化的每条人工鱼个体,首先尝试进行聚群行为和追尾行为,而且选取最优的一种行为指导其在空间中的实际移动,最终完成所有人工鱼的一次位置更新[2].算法中公告板中的记录为人工鱼的位置更新和个体寻优提供参考指导.
人工鱼群算法中,人工鱼的聚群行为和追尾行为促进整个鱼群快速朝着全局最优的区域位置方向游动,所以,人工鱼群算法在前期运行过程中,收敛速度较快,而在搜寻至最优区域后[3],该算法为避免过度拥挤现象的再现,增加了鱼群的随机搜索行为,但是人工鱼的盲目随机游动,又会延缓后期最优区域内搜索全局最优解的过程,从而使后期收敛速度受到极大影响.
2 蛙跳算法
蛙跳算法(FLA)最早由Eusuff等学者于2003年首次提出,它是一种模拟青蛙群体寻找食物过程的优化方法.同人工鱼群算法相似,蛙跳算法将待优化参数看成青蛙所在位置,青蛙位置好坏通过目标函数值来衡量和评价.在蛙跳算法中模仿青蛙寻食的过程,就是较劣位置青蛙不断向着较优位置跳跃的过程[4].
1)在D维目标搜索空间内,由n只青蛙组成初始种群,第i只青蛙位置为Xi=(x1,x2,x3,…,xn,),其中xi(i=1,2,…,n)为待优化参数.
2)由青蛙位置参数计算目标函数,并得到每个青蛙个体所处位置的适应度.将所有青蛙个体根据适应度从高到低排序,且将n只青蛙划分成p个子群,每个子群又都有k只青蛙,即n=p×k.
3)在每个子群中,适应度最好时对应的最优位置用Xb表示,适应度最差时对应的最差位置用Xw表示,整个蛙群中所有子群中适应度最优青蛙用Xg表示.在蛙跳算法的进化进程中,适应度最差青蛙首先要向本子群中适应度最优青蛙跳跃,当前适应度最差青蛙位置Xw按公式(2)、(3)规则进行更新.

上式中,R表示[0,1]区间上的随机数,Dj记为第j维上青蛙移动距离,Dmax记为青蛙一次改变位置的最大值,Xw代表最差青蛙的当前位置,Xw(new)代表最差青蛙更新计算后的位置.
4)当Xw(new)位置的适应度高于Xw位置的适应度,那么完成一次位置更新,否则利用整个蛙群最优个体Xg替换(2)式中Xb进行计算,如果新位置Xw(new)适应值仍然没有变好或改善,那么青蛙随机在目标搜索空间内跳跃,产生一个新位置来替换原来的最差青蛙位置Xw.
5)将蛙群中各子群中的青蛙重新混合在一起,按要求重新按适应度排序并划分各子群,不断重复进行上述步骤中的更新操作,直至达到规定的迭代次数或者满足设定的适应度值为止.
蛙跳算法在进化过程中,通过对蛙群内青蛙排序及各子群划分进行局部搜寻,并通过不断改善蛙群中最差青蛙位置来实施对蛙群的整体寻优,因此,蛙跳算法中采取的青蛙位置更新策略的方向性更强,对于某一较小区域空间内的局部搜索寻优能力非常强.
3 人工鱼群—蛙跳混合算法及其神经网络优化
人工鱼群算法前期搜索速度快,能够迅速搜索并锁定待求的全局最优区域,但是算法在后期运行中要搜寻到精准的最优值,因计算复杂而导致收敛过程变得缓慢.蛙跳算法的局部搜寻能力强大,然而该算法在前期寻优时具有计算量大、收敛速度慢等缺陷.为此,通过比较并结合两者的优势与缺陷,有效融合人工鱼群算法与蛙跳算法,形成人工鱼群-蛙跳混合算法(AFSA-FLA),从而整体加快算法的收敛速度,提升算法的优化精度[5].笔者尝试将人工鱼群-蛙跳混合算法用于电力变压器的神经网络故障诊断.在采用AFSA-FLA混合算法训练优化BP神经网络时,所有人工鱼的位置Xi及其食物浓度Yi等状态向量、青蛙位置参数均对应于网络的连接权值和阈值.初始化时由随机函数生成一定数目个体,便自动生成多组BP神经网络的权值及阈值,构成人工鱼群或青蛙群体.AFSA-FLA混合算法优化神经网络时,首先通过人工鱼群算法的全局快速收敛优势,使鱼群迅速搜寻到全局较优值所处区域,然后再采取蛙跳算法迅速在较优区域内进行局部搜索,直至寻到最优位置,最终使均方误差(适应度)指标为最小[6].此时最优位置便是BP神经网络中最优连接权值和阈值.均方误差(适应度)指标J定义为:

式中,Qjk定义为第j个训练样本在第k个输出节点处的期望网络输出值,Yjk定义为第j个训练样本在第k个输出节点处的实际网络输出值,m为神经网络输出节点数,n为学习训练样本数.人工鱼群-蛙跳混合算法优化BP神经网络的流程如图1所示[7].
4 基于AFSA—FLA神经网络的变压器故障诊断算例
4.1变压器故障诊断网络结构设计
当变压器在运行过程中出现过热和放电等各种热、电故障时,一般生成H2(氢气)、CH4(甲烷)、C2H2(乙炔)、C2H4(乙烷)、C2H6(乙烯)等主要故障特征气体,变压器故障类型与故障各特征气体含量之间不存在准确的映射关系,而表现出较为复杂和严重的非线性关系,利用神经网络可以克服其非线性问题带来的变压器故障诊断瓶颈.首先求取H2、CH4、C2H2、C2H4、C2H6等五种气体含量与所有氢烃气体总量的比值,分别记为X1、X2、X3、X4、X5,并将X1~X5作为网络的归一化输入量.其中,输入数据经过归一化处理后,保证网络输入X1~X5值介于0和1之间,以防止学习样本数据间因存在明显差异性而制约网络的收敛性能.神经网络输出设定为高温度过热(Y1)、中低温度过热(Y2)、高能量放电(Y3)、低能量放电(Y4)、正常运行(Y5)等5种输出状态.设定高温度过热的故障温度≥700℃、中低温度过热<700℃.高能量放电包括变压器的电弧放电及较强火花放电,低能量放电包括变压器的局部放电及较弱火花放电.假若网络的输出Y1~Y5越大,则说明对应输出故障类型及状态出现的概率越大.当变压器出现高温度过热时,网络输出Y1期望值应为1,而此时Y2~Y5输出期望值均应为0,网络输出编码和变压器故障之间的对应规则如表1所示.用于变压器故障诊断的原理示意图如图2所示.

表1 故障类型与网络输出编码关系

图2 变压器故障诊断原理示意图
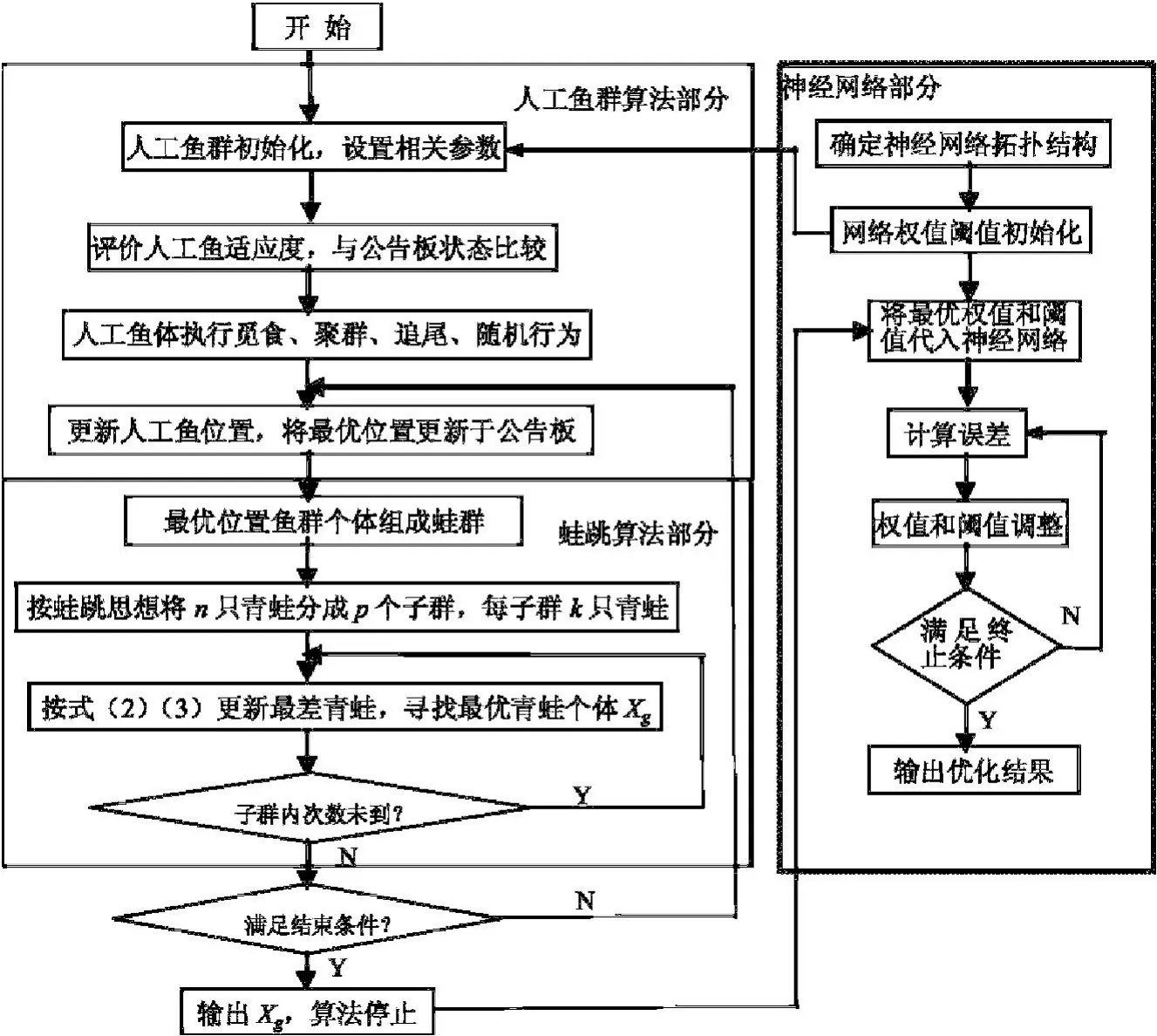
图1 人工鱼群—蛙跳混合算法优化神经网络流程
4.2神经网络训练与测试
利用AFSA-FLA混合算法优化神经网络时,通过多次模拟实验,选取的初始化参数取值如下:人工鱼群数量为300,人工鱼的感知范围rang为0.85,人工鱼的移动最大步长step为0.75,鱼群的拥挤度因子λ为0.618,最大迭代次数为300,人工鱼的试探最大次数number为30;蛙群全局最大迭代次数为200,蛙群中青蛙数目为100,子群体数目为20,子群内最大迭代更新次数为10.BP神经网络采取5-14-5结构,网络目标误差精度为0.0001.笔者利用MATLAB7.0软件,将经过变压器吊芯处理的60组故障数据用作学习样本(此略),对上述设计的神经网络进行训练,直至网络训练后的输出误差在设定的目标误差范围内,并取得网络最优权值、阈值等参数.通过对人工鱼群算法、蛙跳算法、人工鱼群-蛙跳混合算法的对比分析,采取本文设计的AFSA-FLA混合算法训练优化神经网络,速度快,精度高(见表2).

表2 神经网络不同训练算法比较
本文搜集并选择某供电公司从现场监测到的15组变压器发生故障及正常运行数据,这些数据表示变压器油中溶解的H2、CH4、C2H2、C2H4、C2H6等5种气体浓度,对其首先作归一化处理,即将5种气体浓度值转换为各气体浓度含量所占总烃气体的比值,接着以5种气体浓度的归一化值作为网络的测试输入样本数据,并输出对应的网络诊断结果(表3).由表3可见,网络诊断结论和变压器实际故障及状态完全一致,进一步证明本设计诊断准确性好,可靠度高.

表3 变压器故障测试样本及诊断结果
5 结束语
为实现对电力变压器故障的实时、快速及准确诊断,本文提出基于人工鱼群-蛙跳混合算法优化神经网络的变压器故障诊断技术,仿真结果及算例表明,本文采用的人工鱼群-蛙跳混合算法,比分别采用人工鱼群、蛙跳算法的训练精度高、收敛速度快,能提高变压器故障诊断的准确度、快速性以及可靠性,该方法对于实际电力工程及工矿企业的变压器运行维护具有一定的指导价值.
[1]苗强.基于人工鱼群算法的变压器故障诊断研究[J].煤炭技术,2015,34(4):291-292.
[2]魏立新,张峻林,刘青松.基于改进人工鱼群算法的神经网络优化[J].控制工程,2014,21(1):84-87.
[3]王敏,周树道,段黎明,等.AFSA+PSO混合算法在BP网络故障中的应用[J],自动化技术与应用,2014,32(3):62-65.[4]余华,黄程韦,张潇丹,等.混合蛙跳算法神经网络及其在语音情感识别中的应用[J],南京理工大学学报,2011,35(5).
[5]耿超,王丰华,苏磊,等.基于人工鱼群与蛙跳混合算法的变压器Jiles-Atherton模型参数辨识[J].中国电机工程学报,2015,35(18):4799-4807.
[6]孟杰,吕正兵.RBF神经网络在道路交通事故预测中的应用[J].常熟理工学院学报,2012,26(2):86-90.
[7]乔维德.改进粒子群优化神经网络的高压断路器故障诊断[J].常熟理工学院学报,2016,30(2):51-55.
Transformer Fault Diagnosis Based on Neural Network with AFSA—FLA
QIAO Weide
(Wuxi Open University,Wuxi 214011,China)
In order to improve the accuracy of power transformer fault diagnosis,this paper proposes a neural network model,which is optimized by AFSA-FLA,and used in the fault diagnosis of power transformer.AFSAFLA combines the advantage of the rapidspeed of AFSA's convergence with prior global and FLA'sstrong localsearching ability.Its operationspeed and optimization accuracy have been greatly improved.Thesimulation resultsshow that this method can effectively diagnose various types of faults with transformer,that the fault diagnosis accuracy rate is high,that the fault diagnosisspeed is quick,and that the method cansatisfy actual engineering needs for transformer fault diagnosis.
transformer;AFSA;FLA;fault diagnosis
TM407
A
1008-2794(2015)04-0070-05
2016-04-25
无锡市社会事业领军人才项目“电力变压器故障参数检测技术”(WX530/2015/006)
乔维德,教授,无锡市首批社会事业领军人才,常州市“831工程”首批中青年科学技术带头人,江苏开放大学学术带头人,研究方向:控制工程,E-mail:qiaowd@wxtvu.cn.
猜你喜欢
计算机仿真(2022年8期)2022-09-28
体育教学(2022年4期)2022-05-05
郑州大学学报(工学版)(2018年2期)2018-04-13
中外文摘(2017年19期)2017-10-10
娃娃画报(2016年5期)2016-08-03
中国塑料(2016年11期)2016-04-16
电测与仪表(2016年3期)2016-04-12
电测与仪表(2016年20期)2016-04-11
电网与清洁能源(2015年5期)2015-12-29
河南城建学院学报(2015年4期)2015-02-27
