
基于变论域模糊PID的船舶柴油发电机调速系统
2016-10-11 12:23张均东祝亮亮
中国航海 2016年1期
杨 森, 杨 杰, 张均东, 祝亮亮
(1.海军工程大学 舰船综合电力技术国防科技重点实验室, 武汉 430033; 2.中国船舶工业系统工程研究院,北京 100036; 3.大连海事大学 轮机工程学院, 辽宁 大连 116026)
基于变论域模糊PID的船舶柴油发电机调速系统
杨 森1,2, 杨 杰1,2, 张均东3, 祝亮亮3
(1.海军工程大学 舰船综合电力技术国防科技重点实验室, 武汉 430033; 2.中国船舶工业系统工程研究院,北京 100036; 3.大连海事大学 轮机工程学院, 辽宁 大连 116026)
为实现船舶电力系统的稳定性控制,对船舶柴油发电机调速系统的控制进行研究,设计基于变论域模糊PID的柴油机调速系统。选取基于模糊规则的伸缩因子,将变论域模糊控制思想与常规PID相结合,形成变论域模糊PID控制系统结构。在不同工况下对常规PID控制、模糊PID控制和变论域模糊PID控制的柴油发电机调速系统的仿真曲线进行对比分析。仿真结果表明:变论域模糊PID控制算法具有更快的响应速度、更好的稳定性、更小的超调量和更强的自适应性。
船舶工程;船舶柴油发电机;调速系统;伸缩因子;变论域模糊PID
Abstract: Rotation speed control technologies for the marine diesel engine generator are investigated, and a diesel engine generator speed control system based on variable universe fuzzy-PID is designed. The system is basically PID type but the scale factors are adjusted according to the fuzzy rules, which makes it "variable universe". The dynamic response curves of the system are compared with those of a conventional PID controller, which shows that variable universe fuzzy-PID algorithm makes the system response faster with better stability, smaller overshoot, and better adaptability.
Keywords: ship engineering; marine diesel engine generator; speed regulation system; scale factor; variable universe fuzzy-PID
随着船舶电站装机容量不断增加、综合电力推进系统广泛普及,人们对船舶供电质量的要求越来越高。由于船舶电网频率主要是由原动机的转速决定的,因此对柴油发电机的转速进行控制是维持船舶电网频率稳定的关键。[1]
目前传统的PID控制在船舶柴油发电机转速控制中仍占主导地位,而大功率发电机具有时变性、不确定性、非线性和强耦合性等特点[2],因此仅采用传统的PID控制很难再继续提高船舶柴油发电机转速的稳定性。[3]
相关学者针对传统PID控制在面对复杂过程时凸显出的不足,提出模糊PID控制、PID神经网络控制和变结构控制算法等多种基于PID的控制算法,但其能否应用于实践中还需作进一步的研究论证。[4]例如,模糊PID控制采用的是固定不变的论域和隶属度函数,且所依据的控制规则不可能达到最完善的地步,因此会使控制不稳定,进而出现振荡和响应变慢的问题。[5]
为进一步提高船舶柴油发电机转速的控制效果,针对传统PID控制存在的固有缺陷,设计一种基于变论域思想的PID控制器。该控制器可实现PID参数的在线自整定,能满足船舶柴油发电机转速控制的需求,可大大提高电网频率的稳定性。
1 变论域模糊控制算法
常规PID控制器是一种线性控制器。
e(t)=r(t)-y(t)
(1)

(2)
式(1)~式(2)中:kp,ki,kd分别为比例系数、积分系数和微分系数。3个环节的物理意义和作用很明显。
1) 比例环节即成比例地反映偏差信号,偏差一旦产生,控制器就会产生作用减小偏差。
2) 积分环节主要消除静差,提高系统的无差度。
3) 微分环节能反映偏差信号的变化趋势(变化速率),并能在偏差信号值变得太大之前引入一个有效的早期修正信号,加快系统的动作速度,减少调节时间。
然而,工业对象普遍存在非线性、时变性和不确定性等因素,常规PID控制是在忽略众多不确定因素的前提下建立模型的,不能达到精确控制的要求。同时,对于复杂的控制对象,受参数整定方法繁琐的影响,常规PID控制器参数往往整定不良、性能欠佳,对运行环境的适应性也较差。
模糊PID控制融合了模糊信息处理方法,能根据系统的运行工况,利用模糊推理调节PID参数,具有模糊控制不依赖于被控对象数学模型和动态响应速度快的特点;同时,克服了模糊控制固有的精度死区,改善了系统的控制品质,尤其对非线性、时变性和不确定对象具有良好的控制性能。对于复杂的被控过程,常规模糊PID控制采用的是固定的论域、输入输出决策因子和隶属度函数,且依据个别专家经验制定的有限控制规则粗糙、不完善,因此当系统在大动态范围内运行时,其论域范围会显得过大或过小,很容易造成PID参数调整过量或调整不足,系统控制性能变差,进而出现振荡、响应变慢和难以稳定等问题。
变论域思想是指在规则形式不变的前提下,输入和输出论域随误差和控制要求的变化作适当的伸缩变换;从局部考虑,论域伸缩相当于增加规则,从而可以提高控制精度。通过对论域进行适当的伸缩变化即可将专家总结出来的初始规则库变为更有效的新规则库,从而克服规则空白的缺陷,达到优化控制的效果。[6-9]
以最简单的单输入单输出系统为例进行分析。已知系统的输入变量为误差e,其基本论域为[-E,E],采用7个规则对其进行划分,得到基本论域及其模糊划分见图1。控制过程中,若误差e缩小,则基本论域相对于缩小后的e会变大,严重影响其控制精度;相反,若误差e变大,则控制器的输出值会一直大于理想的输出值,这会导致被控量上下波动而难以达到期望值。输出量μ也存在类似问题。变论域的实质就是使论域适时进行伸缩变换,从而获得理想的输出。图2为论域的收缩与膨胀,误差e的基本论域[-E,E]通过伸缩因子α(x)变换为[-α(x)E,α(x)E],进行收缩或膨胀,增加了可用规则,提高了控制精度。
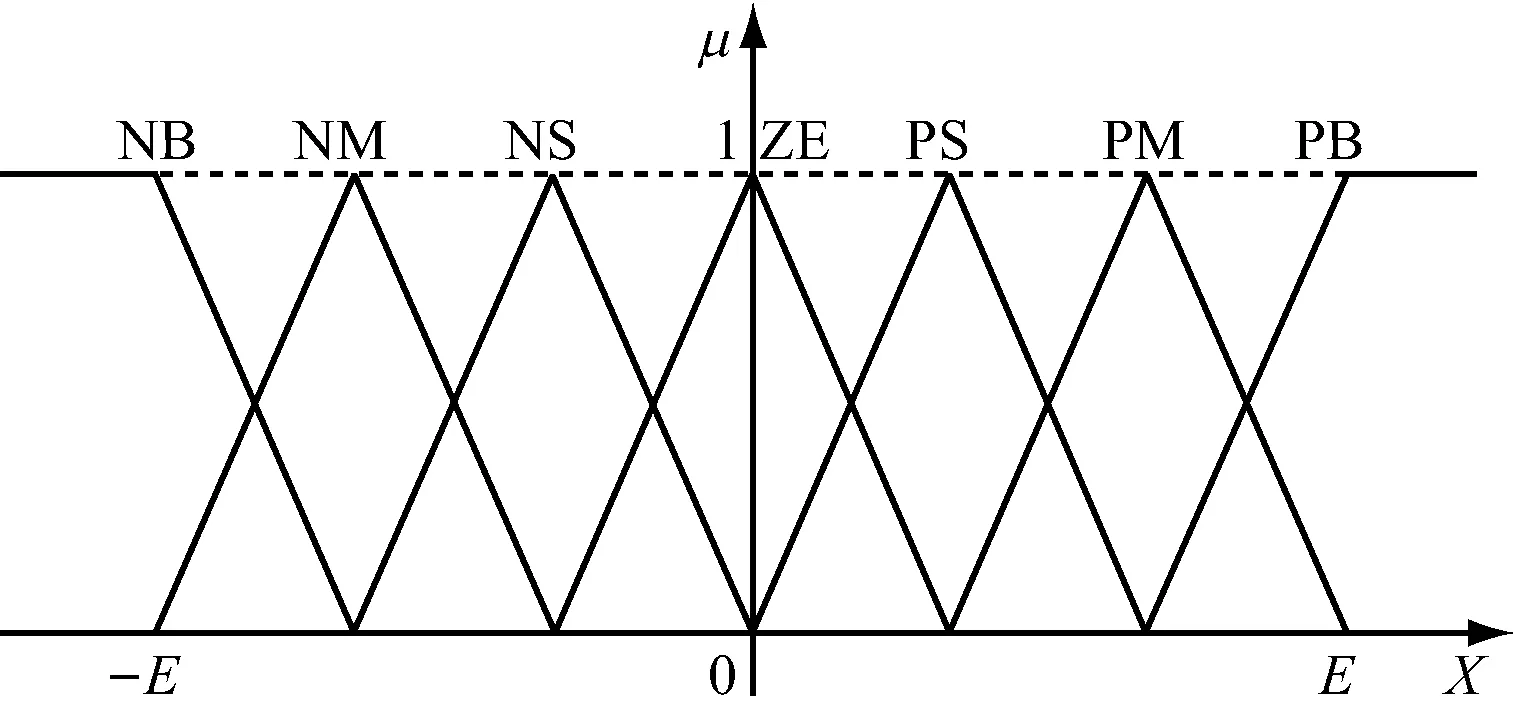
图1 基本论域及其模糊划分
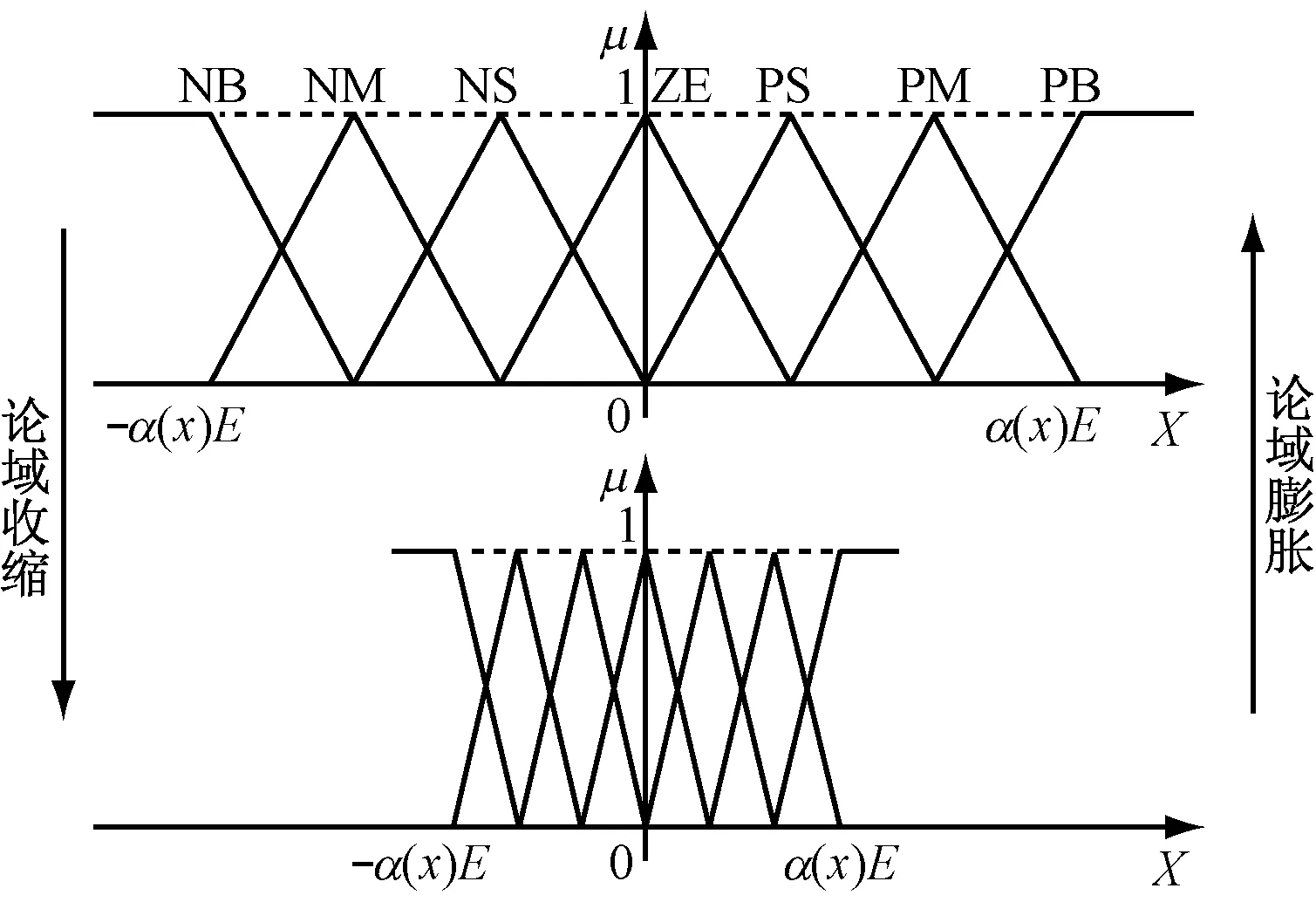
图2 论域的收缩与膨胀
2 基于模糊规则的伸缩因子
设计变论域模糊控制器的关键是确定伸缩因子,使基本论域适时伸缩,实现控制的最优化。[10]
目前变论域模糊控制算法的伸缩因子还没有统一的形式,常见的伸缩因子构造方法有以下2种。
1) 由误差或误差变化量的函数确定。
2) 基于模糊规则确定某个论域的伸缩程度。
这里研究的控制器基于双输入单输出系统。设系统的输入变量为误差e和误差变化率ec,伸缩因子的选取采用模糊规则算法,分析如下。
1) 当e和ec减小时,将其论域E和Ec缩小,使缩小后的可用规则增多,以增强其控制灵敏度。
2) 当e和ec增大时,使其论域E和Ec维持不变。
设e和ec基本论域的伸缩因子分别为α1和α2,表1为输入论域的伸缩因子规则,其中:B,M,S,Z,N表示论域伸缩的程度。

表1 输入论域伸缩因子规则
设β为系统输出论域的伸缩因子,确定β值时,应同时考虑e和ec的大小及符号,分析如下。
1) 当e和ec的值较大且符号相同时,说明被控量与给定值之间的偏差较大且正以较快的速率变得更大,此时控制系统只有输出较大的控制量才能将被控量快速调节回来,使其尽快靠近给定值。因此,β应取较大值。上述分析用模糊规则表示为:
(1) 若e为PB且ec为PB,则β为VB;
(2) 若e为NB且ec为NB,则β为VB。
2) 当e和ec的值较大但符号相反时,说明被控量与给定值之间的偏差只是暂时较大,被控量正以较快的速率跟踪给定值,若此时输出量较大,则系统会产生振荡现象,严重影响控制效果。为使被控量能快速、平稳地靠近给定值,β应取较小值,稍微压缩输出论域。上述分析用模糊规则表示为:
(1) 若e为PB且ec为NB,则β为Z;
(2) 若e为NB且ec为PB,则β为Z。
3) 当e非常小、ec很大时,说明被控量与设定值之间的偏差只是暂时较小,被控量正快速偏离给定值,偏差值将瞬间增大,此时控制系统只有输出较大控制量才能抑制偏差快速增大的趋势。因此,β应取较大值。上述分析用模糊规则表示为:
(1) 若e为Z且ec为NB,则β为B;
(2) 若e为Z且ec为PB,则β为B。
同理可推导出β在其他各种情况下的取值(见表2),这里不再赘述。
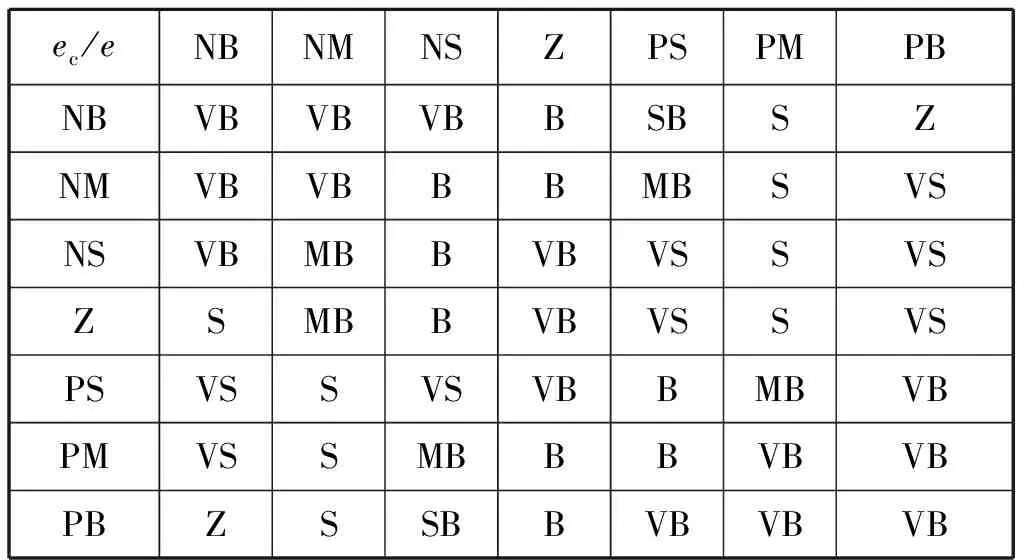
表2 输出论域伸缩因子规则
2 变论域模糊PID控制器的设计
根据常规PID控制和模糊控制的特点,采用变论域模糊控制与PID相结合的控制算法能实现PID控制器参数的优化自适应,进一步完善PID控制器的自适应性能。所设计的船舶柴油发电机调速系统结构见图3,整个系统分为以下3个部分。
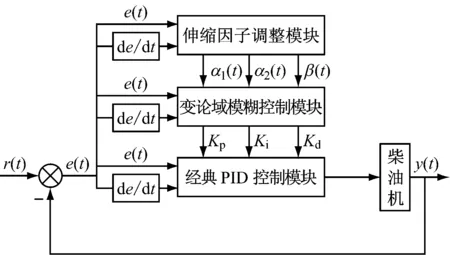
图3 变论域模糊PID控制器原理
1) 第1部分为伸缩因子调整模块,其输入量是e和ec,根据输入量进行模糊推理得出3个基本论域的伸缩因子α1(t),α2(t)和β(t)。
2) 第2部分为变论域模糊控制模块,第1部分的输出量作为该模块的输入量,进行模糊推理后得到PID的调整参数ΔKp,ΔKi和ΔKd,然后分别与初始值相加得到最终优化的PID参数Kp,Ki和Kd。
3) 第3部分为经典PID控制模块,该模块的输入量来自于优化后的PID参数,输出量就是驱动后面执行机构动作的控制量,通过该控制量对柴油发电机的转速进行调整。
e和ec的基本论域均设为[-8,8],语言取值为:负大(NB)、负中(NM)、负小(NS)、零(Z0)、正小(PS)、正中(PM)和正大(PB)。将e和ec的模糊语言变量量化到整数论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。
ΔKp,ΔKi和ΔKd的基本论域均设为[-0.1,0.1],语言值取为:负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。将其模糊语言变量量化到整数论域为{-0.06,-0.05,-0.04,-0.03,-0.02,-0.01,0,0.01,0.02,0.03,0.04,0.05}。
利用MATLAB可视化编辑模块FIS Editor编写模糊控制规则。这里的模糊控制器输入的是系统误差e和误差变化率ec,输出的是(Kp,Ki,Kd),采用Mamdani算法进行规则编写,利用Simulink工具箱Fuzzyblock中的FIS s-function模块载入编写好的模糊规则库,建立变论域自适应模糊PID模块,最后得到的模糊PID控制仿真模块见图4。
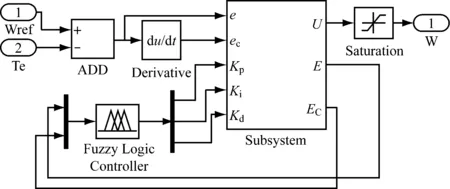
图4 变论域模糊PID控制仿真模块
对于柴油发电机调速系统,常采用简化后的模型。主控制器与放大单元构成比例微分加二阶惯性环节的控制单元,通过调节柴油机油门执行器实现转速的调节。柴油机的输出转速通过积分环节转换为转矩,再加上柴油机的延时特性;该转矩通过机组延时环节之后与乘法器的转速信号相乘得到转矩功率信号,发电机在该转矩功率驱动下发出电功率,可得到包括传统PID控制器的船舶柴油发电机组转速
控制系统的传递函数为

(3)
所研究的船舶柴油发电机转速控制系统中的相关参数为:K=35;T1=0.3 s;T22=0.000 2;T3=0.2 s;T4=0.001 3 s;T5=0.027 s;T4=0.006 s;T5=0.041 s;τ=0.05 s。
3 仿真研究
为验证所设计的变论域模糊PID控制器的控制性能及效果,搭建基于Simulink平台的船舶柴油发电机转速控制系统,采取的仿真对象为中速发电柴油机的调速系统,额定转速为1 500 r/min。同步发电机的额定功率设定为3.125 MW,额定电压为6.6 kV,频率为60 Hz。Simulink仿真模块见图5。
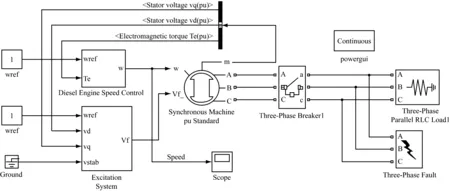
图5 柴油发电机转速控制Simulink仿真模块
在传统PID控制中,PID参数不能在线自整定,只能根据设计人员的经验进行调整,得出的参数往往难以达到最优的控制效果。考虑到柴油发电机运行过程中各种干扰因素会使系统受到不同程度的影响,分别对柴油发电机的空载启动、突加突卸有功负荷和三相短路故障等3种工况进行仿真验证。
在仿真开始之前,设定3种控制器的初始参数:常规PID控制器的参数调整为Kp=0.001 2,Ki=0.002 3,Kd=0.000 1;模糊PID控制器的初始参数为Kp0=0.001 5,Ki0=0.002 5,Kd0=0.000 1;变论域模糊PID控制器的参数选取为Kp0=0.03,Ki0=0.02,Kd0=0.001。
图6为柴油发电机空载启动时的转速曲线。常规PID控制下柴油机空载启动时的超调量大,系统稳定时间较长;模糊PID控制下超调量和稳定时间都得到一定程度的优化;变论域模糊PID控制器作用下的曲线响应速度最快、稳定时间最短,空载启动时超调量最小。
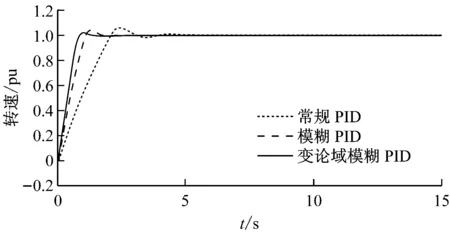
图6 柴油发电机空载启动时的转速曲线
图7为突加突卸50%负荷(即柴油机启动并达到额定转速后在空负荷状态下运行,第10 s突加50%额定负荷,稳定后在第15 s突卸50%额定负荷)时的转速曲线,可很明显地看到常规PID的控制曲线对干扰信号的响应速度较慢、稳定时间最长;模糊PID曲线波动较大;变论域PID输出波形平缓、波动幅度减小、稳定时间最短,抗干扰性有很大改善。
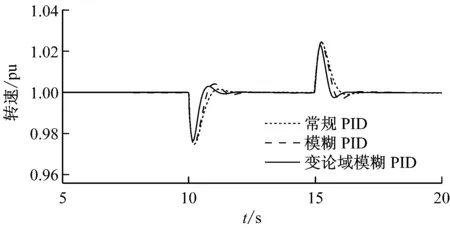
图7 突加突卸50%负荷时的转速曲线
图8为三相短路故障时的转速曲线,模拟船舶电网未进行电网保护时加入三相短路故障柴油发电机的转速变化情况(在第15 s时加入故障,第16 s时消除故障)。发生故障时,常规PID的动态过程不太理想,波动幅度最大、稳定时间最长;模糊PID有所改善;变论域模糊PID的响应速度有所提高,曲线更为平滑、波动较小,具有更快的响应速度、更小的波动量和更好的自适应性。
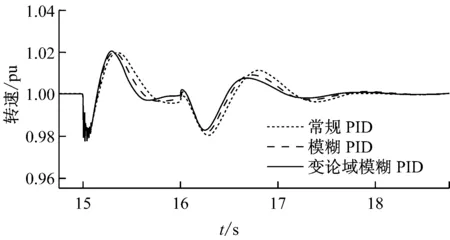
图8 三相短路故障时的转速曲线
对于船舶柴油发电机这种时变的非线性复杂系统,在不同工况下受到不同干扰时,变论域模糊PID的控制均能取得较好的控制效果、达到预期目的。
4 结束语
船舶柴油发电机变论域模糊PID速度控制器采用模糊推理的算法对参数进行在线调整,以满足各种工况下调速的需要。通过MATLAB/Simulink平台进行建模仿真,结果表明:变论域模糊PID控制相对于常规PID和模糊PID具有更好的鲁棒性和自适应性、更快的响应速度和更小的超调量,可给发电柴油机调速系统的实际开发提供一定的参考。
[1] 卢贤基.船舶发电柴油机调速系统的研究与设计[D].大连:大连海事大学,2013:1-2.
[2] MALIK O P. Artificial Intelligence Techniques and Apllied to Adaptive Power System Stabilizer Design[C]. IEEE Power Engineering Society General Meeting, 2006:1-7.
[3] 罗乐.船舶电力系统建模与控制[D].武汉:武汉理工大学,2011:1-4.
[4] 丁茂深,张艳.船舶柴油发电机转速的BP-PID并行控制[J].船电技术,2012,32(12):15-18.
[5] 潘永平,王钦若.变论域自适应模糊PID控制器设计[J].电气自动化,2007,29(3):9-12.
[6] 李洪兴.变论域自适应模糊控制器[J].中国科学,1999,5(1):32-42.
[7] 裘智峰,黄灯,桂卫华,等.基于变论域插值模糊PID控制系统的研究与应用[J].仪器仪表学报,2008,29(11):2435-2440.
[8] WANG J, ZHANG Z, LI HY. Synchronization of Fitzhugh Nagumo Systems in EES Via Hinfinity Variable Universe Adaptive Fuzzy Control[J]. Chaos Solitons & Fractals, 2008, 36(5): 1332-1339.
[9] 郭海刚.变论域自适应模糊控制的几种新方法[D].大连:大连理工大学,2013:24-35.
[10] 朱岩,郭军平.变论域自适应模糊PID方法的研究与仿真[J].空军工程大学学报:自然科学版,2005,6(5):11-13.
RotationSpeedControlofMarineDieselEngineGeneratorBasedonVariableUniverseFuzzy-PID
YANGSen1,2,YANGJie1,2,ZHANGJundong3,ZHULiangliang3
(1. National Defense Science and Technology Key Laboratory of Ship Integrated Power Technology of Naval University of Engineering, Wuhan 430033, China; 2. China Ship Industry System Engineering Research Institute, Beijing 100036, China; 3. Marine Engineering College, Dalian Maritime University, Dalian 116026, China)
2015-11-19
国家科技支撑计划(2012BAG03B02)
杨 森(1987—),男,河北衡水人,工程师,硕士,从事舰船电力推进及自动化控制工作。E-mail:yangmengfei@126.com
1000-4653(2016)01-0017-05
U665.11;TP273.2
A
猜你喜欢
计算机仿真(2022年2期)2022-03-15
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
计算机与数字工程(2019年8期)2019-09-03
消费导刊(2018年8期)2018-05-25
电子制作(2016年21期)2016-05-17
汽车零部件(2015年5期)2015-01-03
汽车与新动力(2014年5期)2014-02-27
汽车与新动力(2013年1期)2013-03-11
