
基于卡尔曼滤波器的智能车过弯时间优化控制算法
2015-12-30 05:15孙涛,徐正进,尤霖等
中国机械工程 2015年19期
基于卡尔曼滤波器的智能车过弯时间优化控制算法
孙涛1,2徐正进1,2尤霖1,2黄序1郑松林1,2张振东1,2孙跃东1
1.上海理工大学,上海,2000932.机械工业汽车底盘机械零部件强度与可靠性评价重点实验室,上海,200093
摘要:对最小过弯时间算法的研究是赛车单圈行驶时间优化的关键问题之一。在最优控制理论的框架下,设计了一种基于Kalman滤波器的过弯时间优化控制算法。运用Kalman滤波算法估计了车辆行驶状态,通过控制算法调节轮胎转角实现了过弯轨迹的优化。最后,根据相似理论Buckingham Pi定理,运用飞思卡尔智能模型车进行试验。结果表明,所设计的优化控制算法可有效缩短车辆过弯时间,验证了优化算法的有效性。
关键词:过弯时间;卡尔曼滤波;动态相似;最优控制
中图分类号:TP391.9
收稿日期:2015-02-11
基金项目:上海市科研创新项目(12ZZ145)
作者简介:孙涛,男,1974年生。上海理工大学机械工程学院副教授。主要研究方向为汽车系统动力学与控制。发表论文20余篇。徐正进,男,1990年生。上海理工大学机械工程学院硕士研究生。尤霖,男,1990年生。上海理工大学机械工程学院硕士研究生。黄序,男,1993年生。上海理工大学光电学院本科生。郑松林,男,1958年生。上海理工大学机械工程学院教授。张振东,男,1968年生。上海理工大学机械工程学院教授。孙跃东,男,1965年生。上海理工大学副校长、教授。
Cornering-time Optimal Algorithm for Intelligent Scaled Vehicle Based on Kalman Filter
Sun Tao1,2Xu Zhengjin1,2You Lin1,2Huang Xu1
Zheng Songlin1,2Zhang Zhendong1,2Sun Yuedong1
1.University of Shanghai for Science and Technology,Shanghai,200093
2.Machinery Industry Key Laboratory for Mechanical Strength & Reliability
Evaluation of Auto Chassis Components,Shanghai,200093
Abstract:Vehicle optimal cornering-time is one of the most significant aspects in the field of lap time optimization. An optimal cornering-time algorithm was proposed herein based on the Kalman filter and optimal control theory. The Kalman algorithm was used to estimate the motion state of the vehicle,and the optimal trajectories were computed by the optimal control algorithm. A scaled vehicle with Freescale controller was developed subsequently according to the Buckingham Pi theorem based on dynamics similarity to validate the effectiveness of the control algorithm. The experimental results indicate that the scaled vehicle reduces the vehicle cornering-time effectively without sacrificing the vehicle stability.
Key words: cornering time;Kalman filtering;dynamic similarity;optimal control
0引言
当前,国内外许多学者对单圈时间优化问题的研究主要集中在准稳态法和瞬态最优方法。准稳态法将车辆轨迹近似为平衡段的连接[1-3],并假定汽车在每段上以恒定的车速和侧向加速度行驶,结合轮胎模型,用剩余的轮胎力计算出纵向加速度。尽管这种方法比较有效,但是却存在两个明显的不足:①对于给定的赛道需要计算出最大速度;②直接丢失瞬态动力学的重要信息,特别是在汽车的极限工况下。瞬态响应法基于最优控制技术,通过最大化或最小化目标函数来解决单圈时间最优化问题,如固定时间下行驶距离最远[4],在操作的过程中找到最高车速的时刻[5]和最小单圈时间[6-7]。国内外学者对单圈时间优化问题提出了几种不同的优化方法。文献[6]以偏离轨迹中心线的距离为独立变量,采用二次规划方法求解非线性车辆路径最优曲线。文献[7]把车辆时变系统转换为空间系统,提出了最短单圈时间策略。文献[8]应用贝尔曼最优化原理,提出了一种半解析方法来解决路径优化问题。文献[9]在半解析方法的基础上搭建了半车模型,在车辆行驶中,根据前后轮胎力的变化,实时计算最优控制输入转角,在保证路径跟踪的同时确保车辆行驶稳定性。上述研究存在的共同问题是,设计时偏重于理论上的分析,缺乏相应的实车验证手段。
笔者提出一种固定时间内最大化弯道内行驶距离的过弯时间优化控制算法,通过建立被控车辆模型、非线性轮胎模型和单点预瞄驾驶员模型,利用最优控制理论与Kalman滤波实现过弯时间的最小化,同时,保证了车辆过弯行驶的稳定性。最后,通过飞思卡尔智能车模型对所设计的控制算法进行验证。
1车辆动力学模型建立
1.1非线性车辆模型
本文采用二自由度单轨车辆操纵动力学模型,如图1所示,该非线性模型的2个自由度分别为沿y轴的侧向运动,绕z轴的横摆运动。

图1 车辆动力学模型
车辆在道路上行驶的运动方程为
(1)

前后轮侧偏角αf、αr分别为
(2)
式中,δ为前轮转角。
1.2轮胎模型
为了表述轮胎特性,本文采用著名的“魔术公式”轮胎模型:
Fy=Dsin(Carctan(Bα-E(Bα-arctan(Bα))))
(3)
其中,Fy为侧向力;α为侧偏角;D为轮胎侧向力附着极限;C为曲线形状系数;B为刚度系数;E为曲线峰值曲率。为了简化非线性轮胎力,这里把它近似为线性时变(lineartimevarying,LTV)模型。用泰勒公式在当前时刻展开,保留一阶分量,舍去高阶分量,则轮胎力可简化为
Fy=C(t)α+D(t)
(4)
式中,C(t)为随时间变化的轮胎侧偏刚度;D(t)为滑移率为零时的轮胎力。
1.3驾驶员模型
采用“预瞄—跟随”驾驶员模型[10],假设驾驶员的前视距离为d,对应的前视时间T=d/vx,该处期望轨迹的横向坐标f(t+T)与车辆的横向坐标y(t+T)相一致。最优侧向加速度为
(5)
最优曲率的公式为
(6)
驾驶员转向盘角输入为
(7)
式中,Kh为转向角增益;τr为驾驶员反映延时;τh为驾驶员操作延时。
考虑反应与执行延时,驾驶员转向盘转角输入整理为
(8)
其中,i为转向系传动比;L为轴距。
2路径优化控制器
2.1路径优化
弯道中,车辆在一定的时间内沿着参考路线行驶的距离越远,则可认为在相同距离下的行驶时间越短。如图2所示,以赛道中心线为参考线,在T时间内,沿参考线行驶的距离为dsr,而这段时间内汽车前进距离为ds。

图2 车辆在赛道上的几何关系
根据图2所示的几何关系,通过车辆侧向位移误差Δy、方向角度误差Δψ及转角变化率dψr计算距离的增量:
Δs=dsr-ds=Δytan(dψr)-(1-cosΔψ)·
(9)
这里需要把Δy和Δψ线性化。根据对车辆运动状态的估计,可以得到赛道中心线和边界的信息。
轨迹切线方向与X轴正向夹角:
γ=arctanΔy
(10)
则方向角度误差Δψ定义为
Δψ=γ-ψ=arctanΔy-ψ≈vxψ+vy-ψ
(11)
侧向位移误差Δy定义为
Δy=vycosΔψ+vxsinΔψ
(12)
为了保持车辆在赛道内,把边界约束条件定义为
-(wr/2-w)≤Δy≤wr/2-w
(13)
式中,wr为赛道宽度;w为轮距的一半。
2.2控制器设计

(14)
控制目标函数:
(15)
在条件Δy≪rr下,可得
(16)
则可以得到
R=1,N=0
求解具有二次型目标函数的最优反馈,可以解黎卡提方程:
ATP+PA-(PB+N)R-1(BTP+NT)+Q=0
(17)
其中,A、B为状态矩阵;Q、R、N为权矩阵;P为黎卡提方程的解,可以利用MATLAB工具中的“LQR”函数来求解。
求解式(17),可以得到反馈增益矩阵KLQG,控制器输出控制量为
δLQG=-KLQGΔx=-KLQG(x-x0)
(18)
式中,x0为理想行驶状态,x0=[0 0ψ*Y*]T;Y*为车道与全局坐标系X轴的侧向距离;ψ*为车道切线方向与X轴正向的夹角。
3Kalman滤波器实现状态估计
Kalman滤波器基于车辆传感器对当前时刻测量的偏差实现对下一时刻状态的准确估计,计算过程包括时间更新和测量更新两部分。时间更新方程推算当前状态变量和误差协方差估计的值,测量更新方程负责反馈状态变量。具体车辆状态Kalman滤波估计器设计步骤如下:
(2)设定Kalman滤波估计器系数,测量噪声协方差R=1;过程激励噪声协方差Q=1000I4;
(3)滤波估计器时间更新部分为

(4)滤波估计器测量更新部分为

驾驶员通过对环境与车辆行驶状态的感知,给车辆一个控制转角δLM。同时车上的传感器对运动状态进行测量,基于测量值和驾驶员控制信号,利用Kalman滤波算法估计车辆状态x,根据车辆行驶状态估计值,应用最优控制理论得到一个附加控制转角δLQG,最终得到的控制转角即过弯时间优化转角δ=δLM+δLQG。过弯时间优化系统如图3所示。
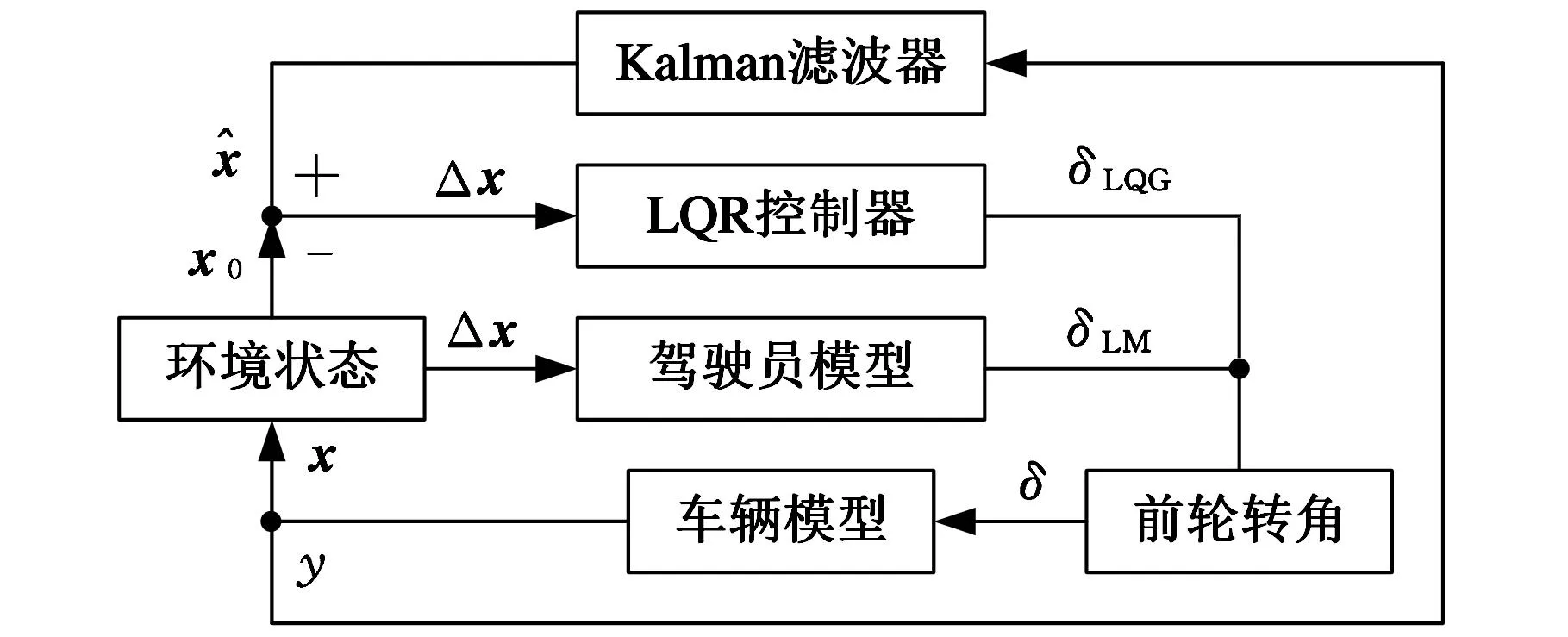
图3 路径控制框图
4比例模型车试验
为了验证所设计控制算法的有效性,根据相似理论Buckingham Pi原理,用飞思卡尔智能模型车进行试验。
4.1动力学等效性
根据量纲分析法,对于某一物理现象,如果两个由微分方程描述的物理系统对应的量纲一项Π相等,那么两个物理系统的微分方程具有相同的解。由测量得飞思卡尔智能模型车参数与实车的基本参数如表1所示,尺寸比例约为1∶10。

表1 未调整时模型车与某实车基本参数
将上述物理量组成量纲一项,可得
Π1Scale=a/L=0.39Π1Real=0.410
Π2Scale=b/L=0.61Π2Real=0.590
Π3Scale=Iz/(mL2)=0.248Π3Real=0.254
式中,ΠiScale、ΠiReal分别为智能模型车和实车的量纲一项,i=1,2,3。
根据表1中参数生成表2的量纲对照表。

表2 车辆基本参数量纲
在表2中以速度v为例,其量纲为m/s,所以长度为1,时间为-1。由于模型车与实车的量纲一项存在一些偏差,故在模型车后方加一配重,调节质心位置。调整后的参数如表3所示。

表3 调整后模型车与某实车基本参数
此时,模型车与实车量纲一项偏差较小,所以可认为智能车模型与实车动力学等效。
4.2试验结果
在开阔平坦的地面上,铺置赛道。记录安装在智能车模上的传感器数据以及耗费时间。图4、图5所示为智能模型车及其在赛道上的行驶情况。
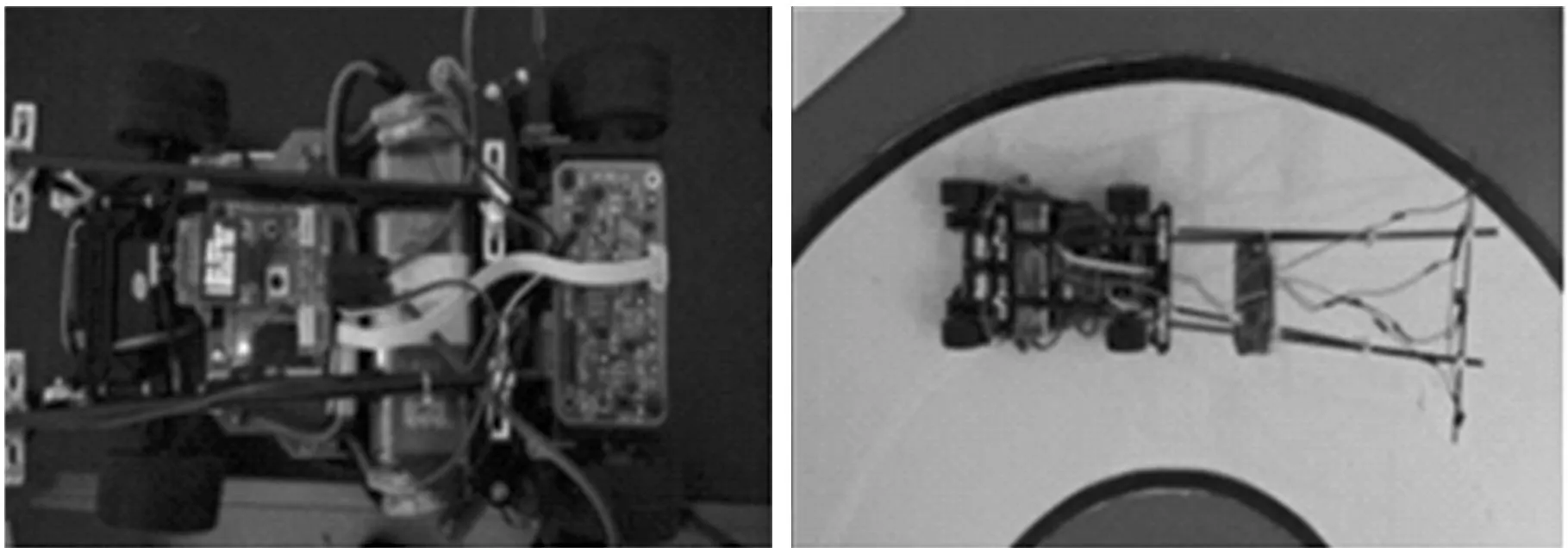
图4 智能模型车图5 模型车行驶在赛道中
赛道由两个相切的1/4圆弧组成的S弯和两段直线赛道构成。根据记录的数据,在模型车车速为2m/s时,每隔1s记录模型车模的位置,结果如图6所示。
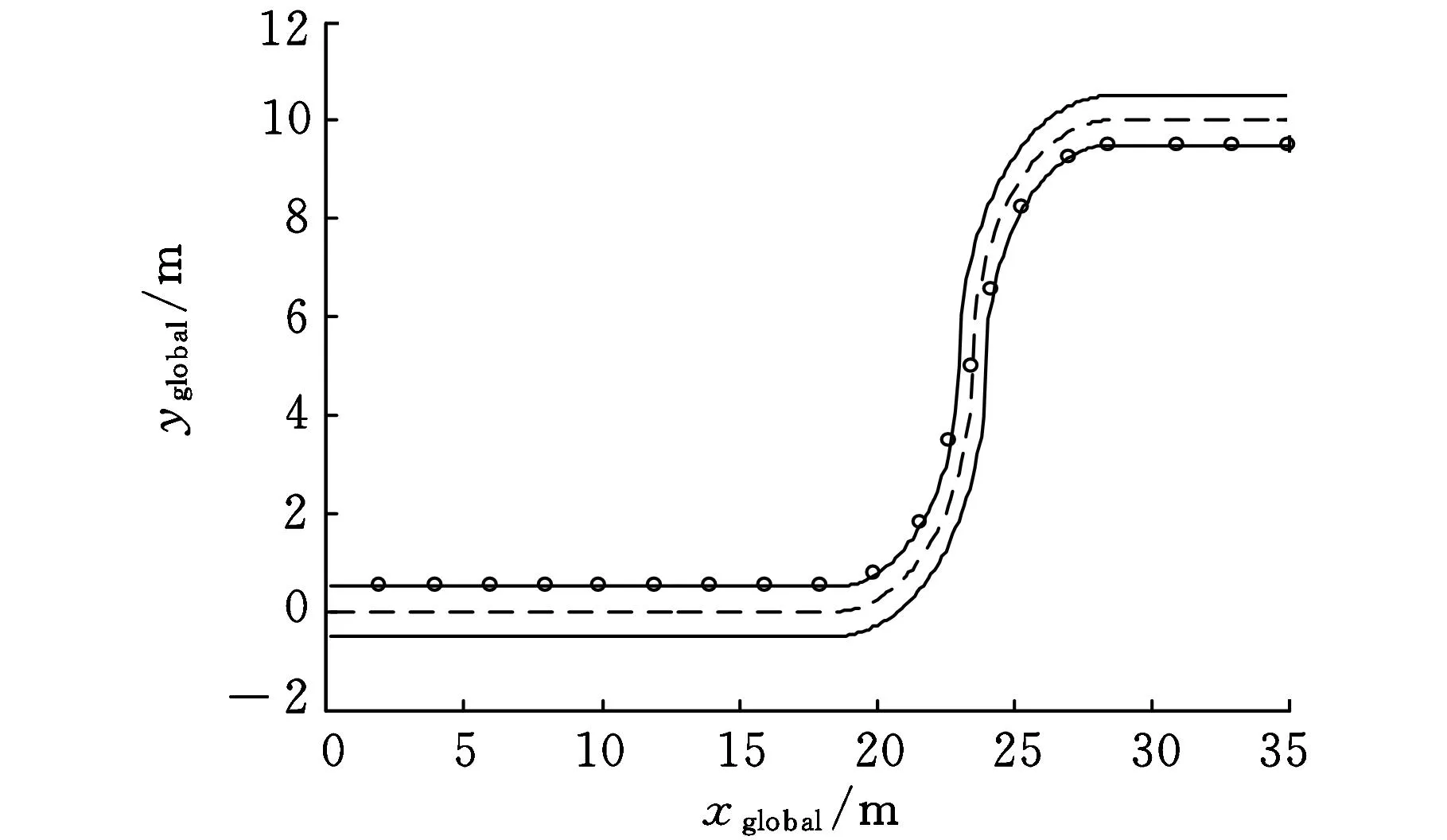
图6 模型车2m/s过弯路径
初始时刻,车辆在平直赛道上行驶,后进入弯道,最后驶出弯道进入平直赛道。结果显示,智能模型车以2m/s进入和离开弯道时,都沿着赛道内侧行驶;S弯道中,以近似直线的轨迹通过,整个过程耗时20s;没有优化控制算法时,整个过程需要21.1s。
将模型车车速增加到3m/s,记录其在赛道中的轨迹。这种情况下,控制器需要在赛道宽度范围内保证车辆顺利通过弯道,如图7所示,智能模型车在探测到前方即将到来的弯道时,控制器提前输出转向信号,控制车辆先向外侧车道行驶,在两个弯道的连接段,几乎以一条直线轨迹通过,最后贴着弯道外侧离开S弯。
图7 模型车3m/s过弯路径
从图8、图9可以看出,在有控制的车辆中,系统动态响应的超调量比没有控制器时的小,整个过程耗时约13.3s,无控制器的车辆需要14.2s。

(a)横摆角速度

(b)侧向速度 图8 高速过弯时的横摆角速度和侧向速度

(a)前轮转角
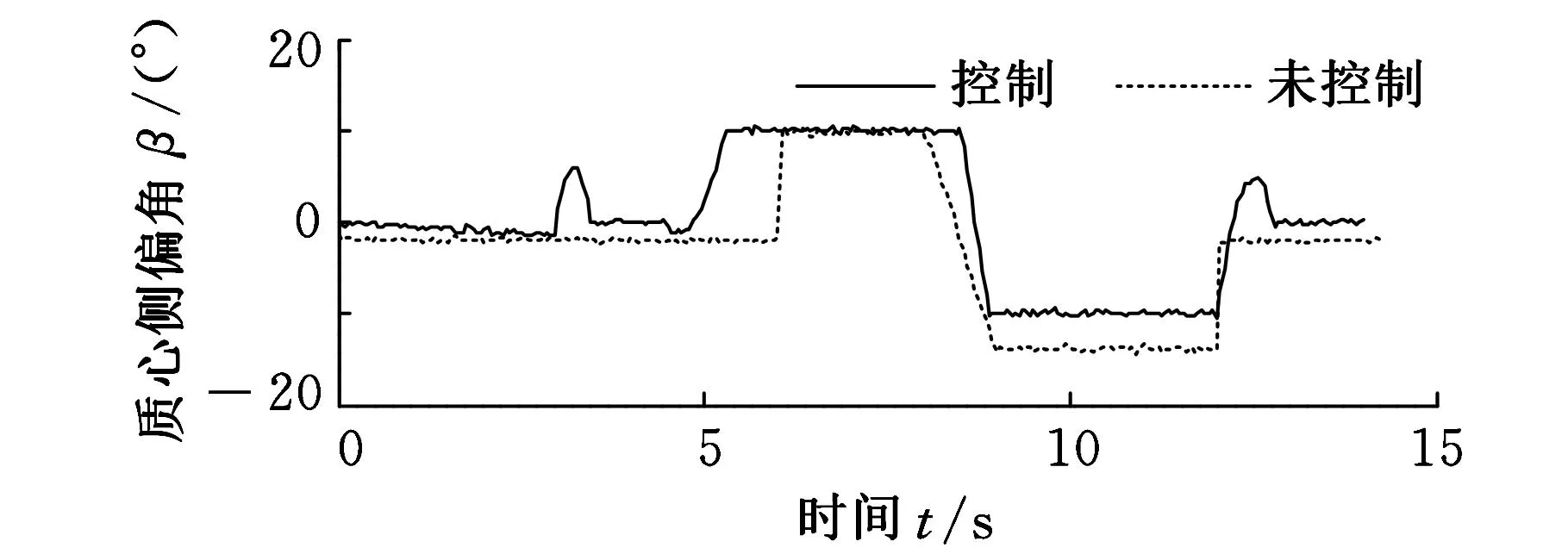
(b)质心侧偏角 图9 高速过弯时前轮转角和质心侧偏角
5结论
(1)试验中,驾驶员模型的加入可为控制算法的有效性提供参照作用。
(2)根据相似理论设计的模型车对控制算法进行了验证,可认为在实车上控制算法的效果是等效的。
(3)所设计的过弯时间优化控制算法,可在不同车速下分别做出相应的优化转向动作,提高了横摆角速度和质心侧偏角的跟踪精度,在保证车辆行驶稳定性的前提下,有效缩短了车辆过弯的时间。
参考文献:
[1]MillikenWF,MillikenDL.RaceCarVehicleDynamics[M].Warrendale:SocietyofAutomotiveEngineers, 1995.
[2]BrayshawDL,HarrisonMF.AQuasiSteadyStateApproachtoRaceCarLapSimulationinOrdertoUnderstandtheEffectsofRacingLineandCentreofGravityLocation[J].ProceedingsoftheInstitutionofMechanicalEngineers,PartD:JournalofAutomobileEngineering, 2005, 219(6): 725-739.
[3]VölklT,MuehlmeierM,WinnerH.ExtendedSteadyStateLapTimeSimulationforAnalyzingTransientVehicleBehavior[J].Int.J.Passeng.Cars-Mech.Syst.,2013,6(1):283-292.
[4]KellyDP.LapTimeSimulationwithTransientVehicleandTyreDynamics[D].Cranfield:CranfieldUniversity, 2008.
[5]VelenisE,TsiotrasP.MinimumTimevsMaximumExitVelocityPathOptimizationduringCornering[C]//2005IEEEInternationalSymposiumonIndustrialElectronics.Dubrovnik,Croatia:IEEE, 2005: 355-360.
[6]TimingsJP,ColeDJ.MinimumManoeuvreTimeofaNonlinearVehicleatConstantForwardSpeedUsingConvexOptimization[C]//Proceedingsofthe10thInternationalSymposiumonAdvancedVehicleControl.Loughborough,UK, 2010:21-26.
[7]RuccoA,NotarstefanoG,HauserJ.ComputingMinimumLap-timeTrajectoriesforaSingle-trackCarwithLoadTransfer[C]//2012IEEE51stAnnualConferenceonDecisionandControl.Maui,Hawaii,USA:IEEE, 2012: 6321-6326.
[8]VelenisE,TsiotrasP.OptimalVelocityProfileGenerationforGivenAccelerationLimits:TheoreticalAnalysis[C]//AmericanControlConference.Portland,OR,USA, 2005:1478-1483.
[9]VelenisE,TsiotrasP.OptimalVelocityProfileGenerationforGivenAccelerationLimits;theHalf-carModelCase[C]//2005IEEEInternationalSymposiumonIndustrialElectronics.Dubrovnik,Croatia:IEEE, 2005: 361-366.
[10]丁海涛, 郭孔辉, 李飞, 等. 基于加速度反馈的任意道路和车速跟随控制驾驶员模型[J]. 机械工程学报, 2010, 46(10): 116-120.
DingHaitao,GuoKonghui,LiFei,etal.ArbitraryPathandSpeedFollowingDriverModelBasedonVehicleAccelerationFeedback[J].JournalofMechanicalEngineering, 2010, 46(10):116-120.
(编辑张洋)
猜你喜欢
数学杂志(2022年2期)2022-09-27
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
北京航空航天大学学报(2021年6期)2021-07-20
数学年刊A辑(中文版)(2021年1期)2021-06-09
电脑知识与技术(2020年15期)2020-07-04
电子制作(2019年20期)2019-12-04
电子制作(2019年23期)2019-02-23
财会学习(2018年2期)2018-01-24
北京航空航天大学学报(2017年9期)2017-12-18
