抑制无刷直流电机换相转矩脉动的新型电流控制
2015-06-27 05:50:58殷帅吕彩琴马铁华
电机与控制学报 2015年8期
殷帅, 吕彩琴, 马铁华
(1.中北大学电子测试技术国家重点实验室,山西太原030051;2.中北大学仪器科学与动态测试教育部重点实验室,山西太原030051;3.中北大学机械与动力工程学院,山西太原030051)
抑制无刷直流电机换相转矩脉动的新型电流控制
殷帅1,2, 吕彩琴3, 马铁华1,2
(1.中北大学电子测试技术国家重点实验室,山西太原030051;2.中北大学仪器科学与动态测试教育部重点实验室,山西太原030051;3.中北大学机械与动力工程学院,山西太原030051)
针对无刷直流电机换相转矩脉动问题,提出一种考虑电枢电阻的换相时刻三相电流配合调制控制方法。该方法在电机全速段换相时刻采用“导通相全开、关断相脉宽调制、非换相相保持”的三相电流控制策略;通过建立换相时刻相电流数学模型,对换相时刻每一相电流变化过程进行理论分析,确定关断相占空比与电机运行参数关系,使导通相和关断相变化速率一致,保证非换相相电流无脉动。该方法在有效抑制换相电流脉动基础上实现了高速区和低速区统一控制,避免了分区不清问题。实验结果表明:与传统换相脉动控制方法相比换相电流有明显抑制效果,全速段电机转矩脉动系数在0.1左右。
无刷直流电机;换相转矩脉动;电流控制;电枢电阻;全速段
0 引 言
无刷直流电机因其高效率、易控制、高能量密度等优点,在家用电器、汽车驱动、医疗、航空、工业自动化等领域取得了非常广泛的应用[1]。但该电机因其特有的电机结构和非连续的换相控制策略,存在转矩脉动较大问题。转矩脉动导致驱动系统产生噪声、振动等问题,影响系统可靠性、缩短使用寿命,制约了其在高精确度高稳定性场合应用。在无刷直流电机各种转矩脉动中,换相转矩脉动影响较大,为有效抑制换相转矩脉动,国内外学者做了大量研究[2-14]。
文献[2]指出:在换相时刻,当直流母线电压为反电动势电压四倍时可保证非换相相电流稳定,换相转矩脉动抑制。文献[3]通过相电流矢量控制方法,实现抑制电机换相电流脉动目标。文献[4-5]分析了5种常用的调制方式并指出:采用PWM-ON模式要比其它几种调制方式换相电流脉动小。文献[6-9]考虑非理想反电动势的换相电流脉动抑制方法,这些方法增加了控制CPU运行负担,不适合低成本控制CPU。文献[10-14]在换相过程中对导通相、关断相和非换相相分别PWM调制,使导通相和非换相相电流变化较快的一相电流减慢,实现非换相相电流恒定目标。其中,文献[10-12]针对无位置传感器无刷直流电机通过在换相期间三相PWM调制抑制换相转矩脉动;该方法均是通过减慢关断相下降速率保证非换相相电流恒定,延长了换相时间,增加系统不可控时间。文献[13]分别对高速区和低速区进行三相占空比调制补偿,使导通相和关断相电流变化速率一致。文献[14]在分析电机换相暂稳态基础上,把换相过程分成三个功能区并对每一相电流分别进行不同占空比的PWM控制。该方法相对简单,低速时获得的非换相相电流也相对平稳。但该方法忽略电枢电阻会使得占空比计算值比实际需要值偏小,且转速越高该方法对非换相相电流补偿值越小,使得该方法在电机高速运行时表现效果不佳。
在考虑电枢电阻对换相时相电流影响下,从无刷直流电机转矩脉动产生的根本原因入手,无需区分高速区和低速区,对电机全速段运行时刻的换相电流配合调制,减慢关断相下降速率同时提高导通相电流上升速率,达到稳定非换相相电流恒定目标,实现了在低成本控制系统下消除无刷直流电机换相转矩脉动目标。
1 转矩脉动降低方法理论分析
1.1 转矩脉动产生原因与解决方法
为充分利用绕组并获得较大转矩,绕组导通方式广泛采用两两导通控制方法,电机每60度电角度换相一次。在忽略电机机械损耗和杂散损耗时,无刷直流电机电磁功率转化为转子动能做功,无刷直流电机转矩表达式可表示为

式中:ia、ib、ic为三相绕组电流;ea、eb、ec为三相反电动势;Te为电磁转矩;ω为电机机械角速度。
由于三相绕组相电流之和为零,换相时刻导通相和关断相电流变化速率不一致导致非换相相电流脉动,而此时反电动势可近似认为常数,因此换相时刻电流脉动必然导致换相转矩脉动。
文献[2]指出,当Ud>4E时,三相绕组中导通相上升速率比关断相下降速率快,非换相相电流增大使换相转矩加大;当Ud<4E时,导通相上升速率比关断相下降速率慢,非换相相电流减小使换相转矩减小;只有当Ud=4E时,导通相上升速率和关断相下降速率相等,换相时转矩保持不变。
1.2 新型换相电流控制方法
在所提出的控制方式中,导通模式仍采用PWM -ON方式,换相模式采用“导通相全开、关断相脉宽调制、非换相相保持”的平稳换相控制方式。该换相模式根本目标是保证非换相相电流稳定,从而抑制换相转矩脉动。
以ab相换相到ac相为例说明该换相模式工作过程。在ab相导通时,电机处于导通模式,功率器件Sa+斩波、Sb-常开;当检测到换相信号时,电机处于换相模式,此时Sa+仍以占空比d斩波,Sc-全开,S-以占空比d斩波。经过一定换相时间,相电流
boff趋于稳定后,换相模式结束,电机切回导通模式。此时Sa+全开,Sc-以占空比d斩波。图1给出电机在一电角度周期内功率器件工作过程。
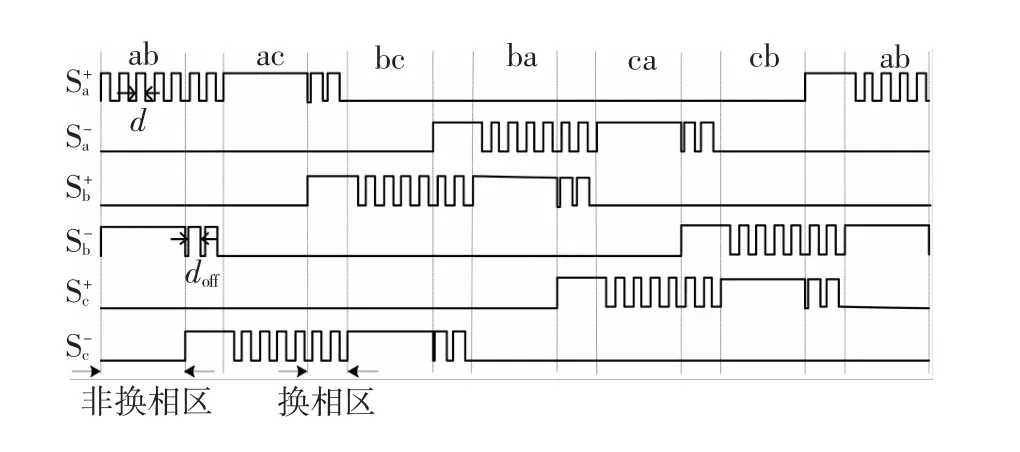
图1 功率器件工作时序Fig.1 The power device sequence diagram
1.3 关断相占空比计算
在确定换相方法后,为得到关断相占空比,需对换相时每一状态下相电流变化过程单独分析。三相绕组星型连接无刷直流电机等效电路如图2所示。规定图中所示的电流、电感、反电动势方向为计算时参考方向。
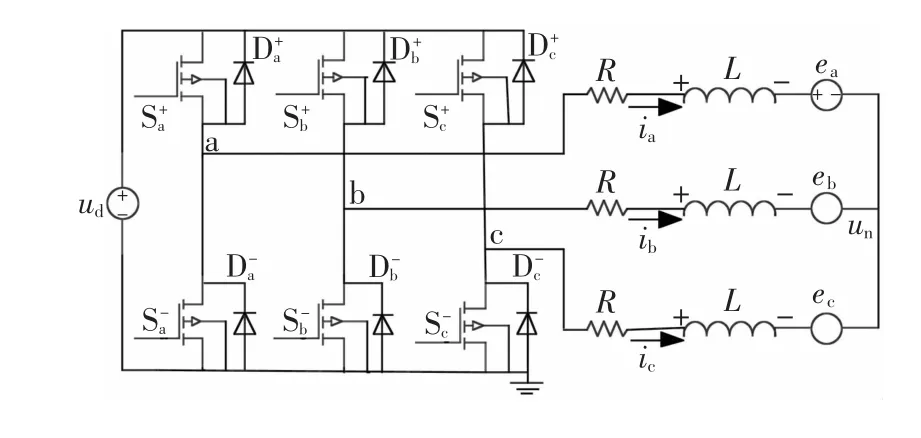
图2 星型连接无刷直流电机等效电路Fig.2 Equivalentmodel of the star connection BLDC
在切换到换相模式一瞬间,Sa+斩波、Sb-、Sc-均导通,母线电流从电源正极出发经a相绕组分流到b、c相绕组流入到电源负极,电机换相时刻绕组导通情况如图3(a)所示。当经过Ts·doff时间后(注: Ts为一个PWM周期),Sb-由导通变为关断,b相绕组通过续流二极管Db+续流,绕组电流情况如图3 (b)所示。
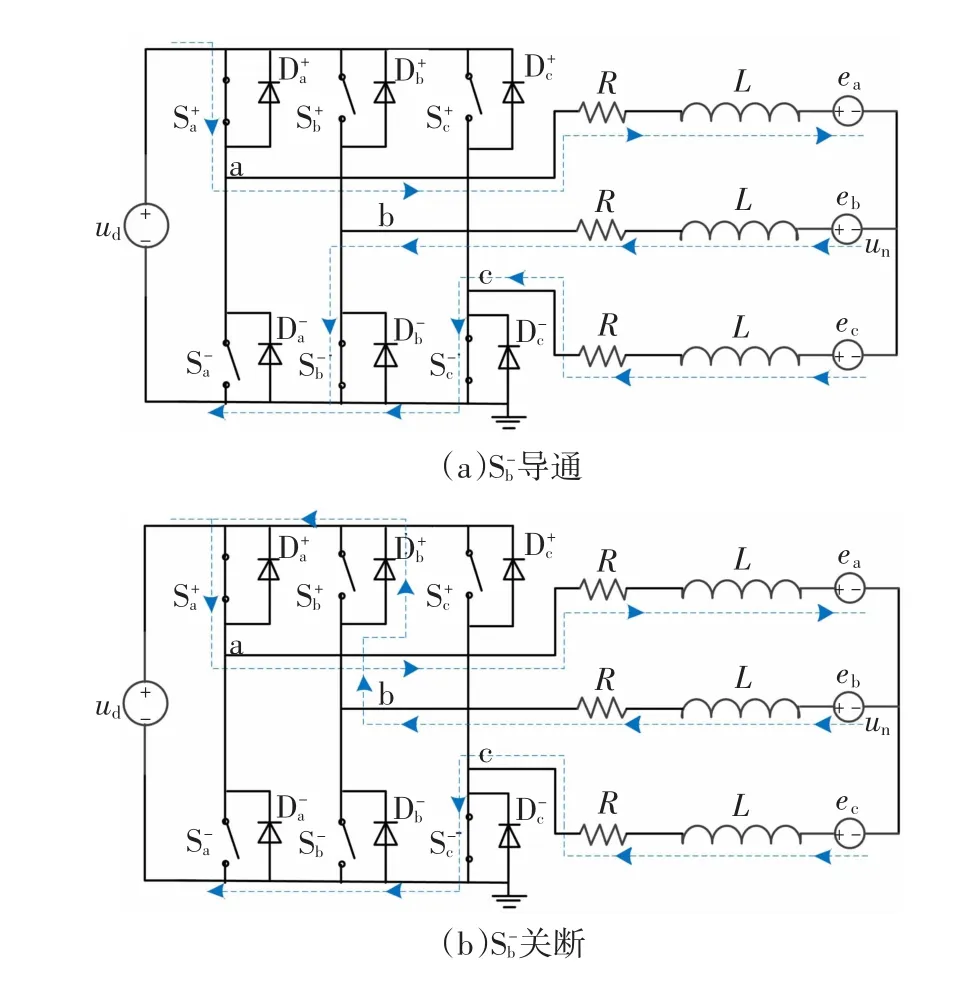
图3 Sb-导通和关断时三相绕组导通情况Fig.3 Three phase w inding conduction of Sbturn on and turn off
分析图3中三相绕组导通情况,可得图4的三相绕组导通情况等效电路图。
根据基尔霍夫定律,图4(a)可列写三相绕组相电压方程为
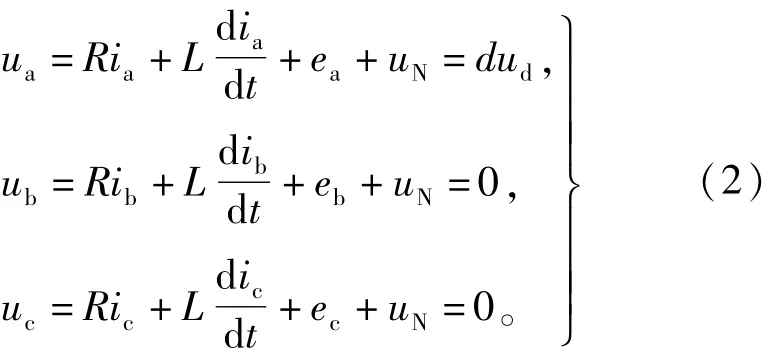
式中:ua、ub、uc为三相绕组相电压;ud为母线电压; ia、ib、ic为三相绕组电流;ea、eb、ec为三相反电动势; R为每相绕组电阻、L为每相绕组自感与互感差。

图4 S-b导通和关断时三相绕组等效电路Fig.4 Equivalent circuit of S-bturn on and turn off
换相时刻很短暂,可以近似认为反电动势为常数,反电动势始终满足

由式(2)可知,在S-b导通时,ib、ic电流响应情况为:
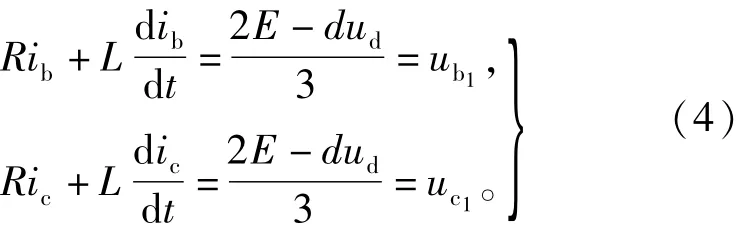
在无刷直流电机检测到换相信号时,三相绕组中ib=-I、ic=0。该电流值为式(4)初始值,因此b、c相绕组电流可表示为:
对式(5)进行泰勒展开,忽略包括二阶项以上的高阶项[6]。简化后的ib1、ic1如式(6)所示:
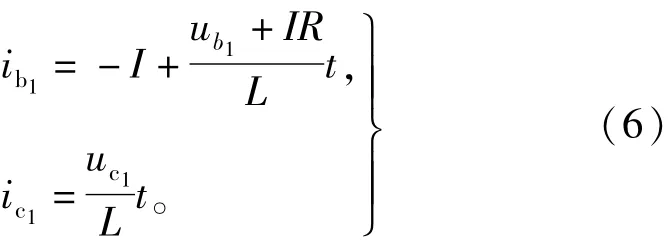
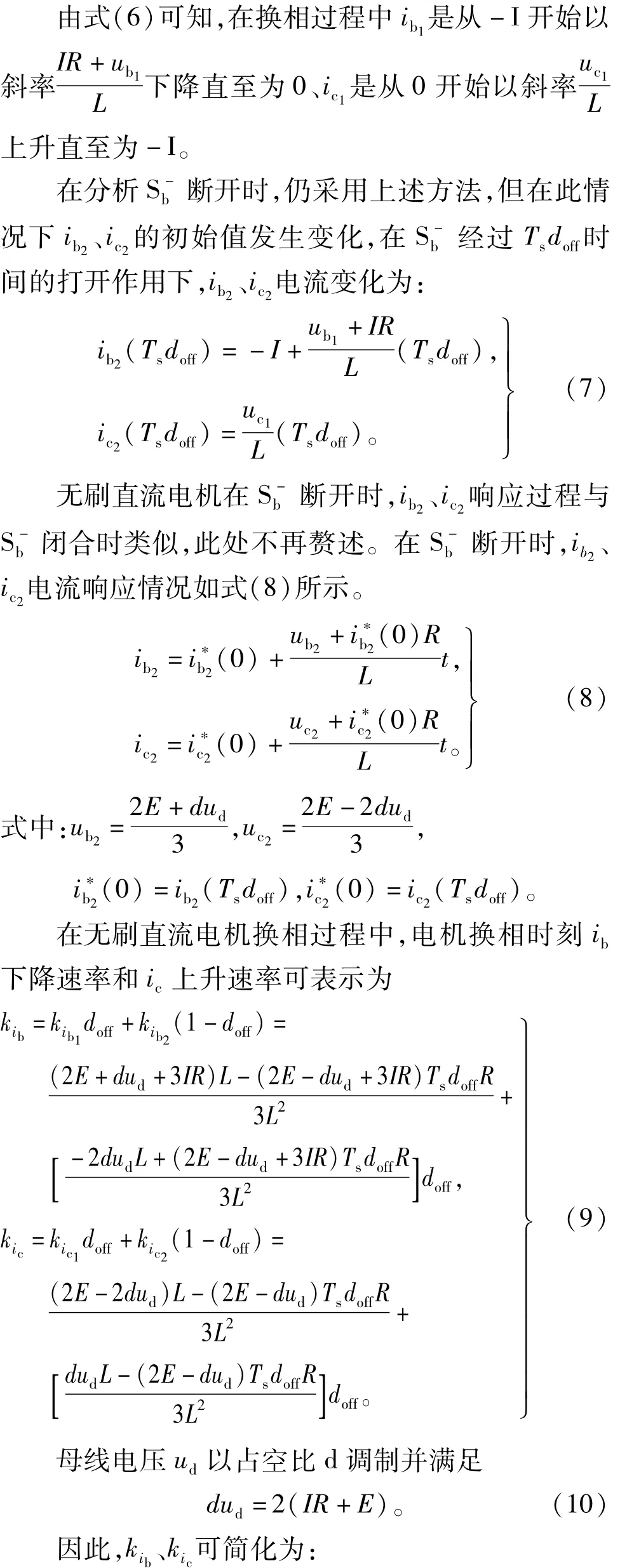
由式(11)可知,对关断相占空比调节不仅可以减慢关断相电流下降速率同时可以加快导通相相电流上升速率,这样在降低换相转矩脉动的同时可以缩短换相时间,电机换相过程不可控时间缩短且该方法更适合电机高速区运行。
无刷直流电机换相转矩脉动产生的主要原因是关断相电流下降速率和导通相电流上升速率不一致。为消除转矩脉动,只要使换相期间ib下降速率和ic上升速率一致,即:kib=-kic,得

无刷直流电机控制系统PWM周期Ts一般为几微秒,对该控制方法影响很小,因此舍去带有Ts项,得

至此可求得关断相占空比doff为

1.4 换相时间计算
在电机完成换相时,关断相电流下降为0,导通相电流上升到最大值,因为导通相电流和关断相电流变化速率一致,这里以关断相电流下降为0来计算换相时间。
在换相时刻ib电流变化关系式
2 实验验证与分析
为验证该方法的可行性,建立了以TMS320F2812为主控芯片、以IRF2807 MOSFET为三相全桥功率器件、以IR2136S为功率器件驱动芯片、以霍尔电流传感器测量母线电流的控制平台。实验样机为一台4对极、星形连接的无刷直流电机,其参数为:额定直流侧电压ud=24 V;额定转矩TN= 0.18 N·m;额定转速nN=2 000 r/min;相电阻R= 1.2Ω;电感L=1.2mH。
在该实验控制系统中,转速采用PI控制,母线电流采样频率和功率器件开关均为20 kHz。当控制系统检测到换相信号时,电机立即进入到换相控制过程中。控制器立即计算关断相占空比并求取换相时间。当控制器计算运行时间达到换相时间后,退出换相控制,电机切回PWM-ON调速运行。
为定量分析所提方法对无刷直流电机换相转矩脉动抑制效果,采用式(17)计算关键参数脉动系数。

式中:ΔX为参数脉动系数;Xmax为参数最大值;Xmin为参数最小值;Xav为参数平均值。
分别对未加入换相控制方法、传统方法(参考文献[14]所提方法)和本文方法在转速从400~1 900 r/min下,据式(17)计算相电流脉动系数如图5所示。由图5可知,未加入换相控制方法时电机全速段下电流脉动系数均较高;传统控制方法在低速段对相电流脉动抑制效果较好,但高速段不理想;本文所提方法在电机全速段运行下对相电流脉动均具有良好抑制效果。
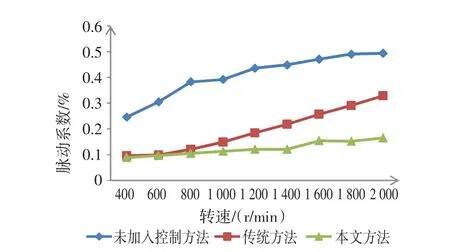
图5 不同转速下相电流脉动系数Fig.5 Phase current ripple factor at different speeds
传统控制方法忽略电枢电阻对换相时刻相电流脉动影响。分析可知:随着转速的增高,电枢电阻对关断相占空比计算值影响增大,使得占空比计算值偏小,导致电机在高速运行时非换相相电流补偿不足,造成电机高速段运行下相电流控制不理想。
图6是在低速段、转速为500 r/min、负载转矩为0.1 N·m时相电流脉动情况。其中,传统换相控制策略控制下的相电流波动情况如图6(a)所示,加入本文换相控制策略后的相电流波动情况如图6 (b)所示。
图7是电机在相同负载下以1 900 r/min时非换相相电流脉动情况。其中,在图7(a)中传统换相控制抑制效果比本文效果差。在图7(b)中加入本文所提的换相控制方法后,换相时刻非换相相电流瞬间跌落得到很好的补偿,非换相相电流仅有微小的换相电流脉动,抑制效果明显优于传统方法。
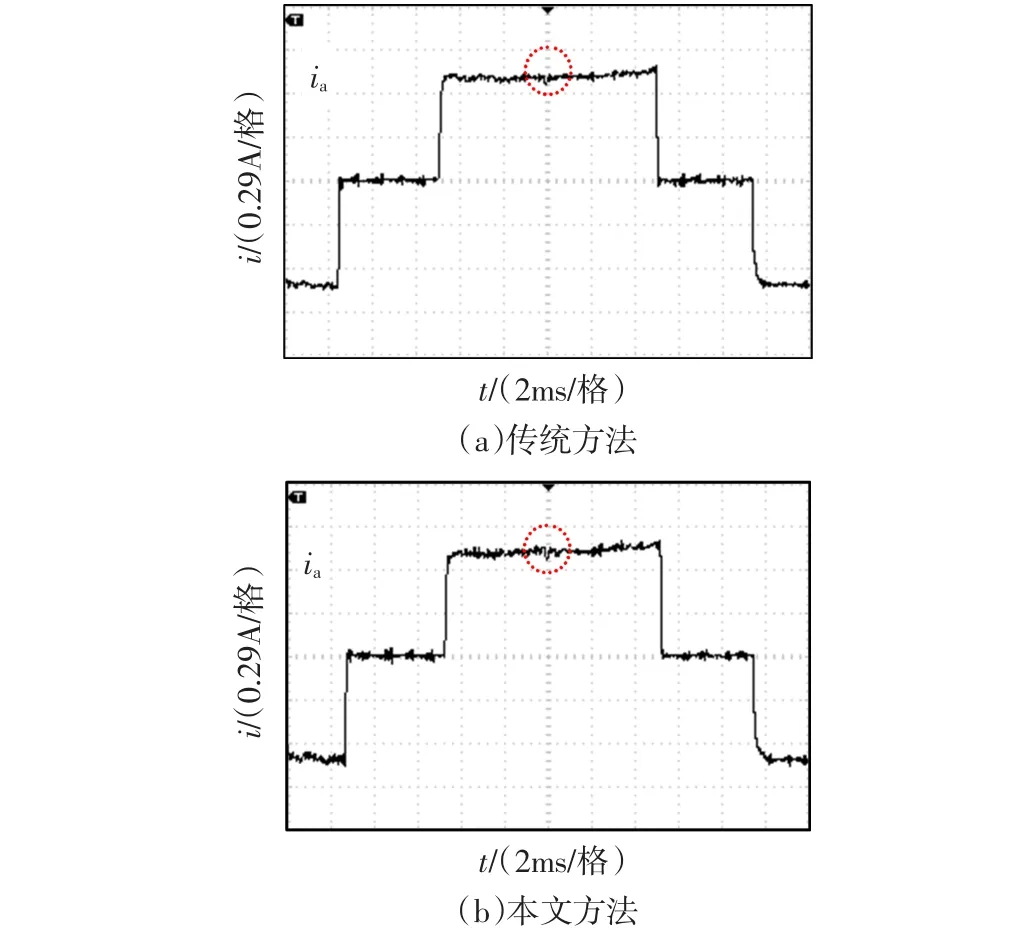
图6 500 r/m in时非换相相电流脉动波形Fig.6 Current fluctuation waveform of 500 r/m in

图7 2000 r/m in时非换相相电流脉动波形Fig.7 Current fluctuation waveform of 2 000 r/m in
为验证该方法在负载转矩突变情况下的有效性,以转速为1 000 r/min、负载转矩从轻载(0.05 N ·m)突增至0.15 N·m,截取相电流上升过程如图8所示。其中,图8下部分为阴影中红色框图区域放大结果。据图8中红色放大区域结果可知,在相电流上升期间,换相时刻相电流运行平稳,基本无脉动。据式(17)定量分析,在负载转矩突变情况下,相电流脉动系数和负载恒定时基本保持一致,表明该方法在负载转矩突变时也有很好的适应性。实验结果表明该方法在转矩负载突变时对换相电流脉动具有很好的抑制能力。
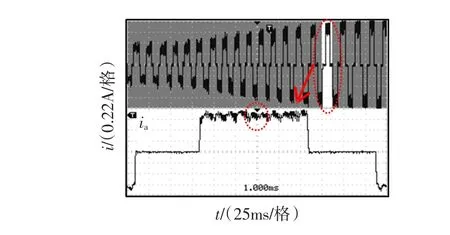
图8 负载突变时非换相相电流脉动波形Fig.8 Current fluctuation waveform of load sudden change
以上实验表明,采用该方法的无刷直流电机非换相相电流脉动在电机全速段均有良好抑制效果,相比于传统相电流抑制方法,该方法在高速区对相电流抑制效果更加明显,因此可有效抑制换相转矩脉动。采用该方法的电机在全速段和负载转矩突变时均稳定运行并对非换相相电流脉动有良好的抑制效果,表明该方法具有很好的适应性和可靠性。
3 结 论
针对无刷直流电机换相转矩脉动问题,提出一种考虑电枢电阻的换相电流控制新方法。在建立并分析换相时刻三相电流数学模型基础上提出通过控制换相时刻关断相占空比,实现换相时刻导通相和关断相电流变化速率相等目标,保证非换相相电流恒定,进而有效降低换相转矩脉动。
相比其他无刷直流电机转矩脉动抑制方法,该方法主要有以下几点优势:
1)在换相时刻考虑电枢电阻对换相电流影响,使该方法对换相时刻相电流控制精确,换相电流脉动显著减小。
2)系统关键参数计算不依赖于相电流、线电压或反电动势,使该方法无需增加硬件,更适合低成本控制系统。
3)换相控制策略无需区分低速段和高速段且相电流脉动均具有明显抑制效果。
[1] 潘雷,孙鹤旭,王贝贝,等.基于单神经元自适应PID的无刷直流电机反电势与磁链观测及无位置传感器直接转矩控制[J].电机与控制学报,2014,18(5):69-75. PAN Lei,SUN Hexu,WANG Beibei,et al.Back-EMF and flux observation based on single neuron adaptive PID and sensorless direct torque control for brushless DCmotor[J].Electric Machines and Control,2014,18(5):69-75.
[2] CARLSON R,LAJOIE-MAZENC M,FAGUNDES JS.Analysis of torque ripple due to phase commutation in brushless DC machines[J].Industry Applications,IEEE Transactions on,1992,28(3):632-638.
[3] VISWANATHAN V,JEEVANANTHAN S.A novel Space-Vector current controlmethod for commutation torque ripple reduction of brushless DCmotor drive[J].Arabian Journal for Science and Engineering,2013,38(10):2773-2784.
[4] 周美兰,高肇明,吴晓刚,等.五种PWM方式对直流无刷电机系统换相转矩脉动的影响[J].电机与控制学报,2013,17 (7):15-21. ZHOU Meilan,GAO Zhaoming,WU Xiaogang,etal.Influence of five kinds of PWM on commutation torque ripples in BLDCM control system[J].Electric Machines and Control,2013,17(7): 15-21.
[5] 齐蓉,林辉,陈明.无刷直流电机换向转矩脉动分析与抑制[J].电机与控制学报,2006,10(3):287-290,29. QIRong,LIN Hui,CHEN Ming.Analysis and attenuation on commutation torque ripples of brushless DC motor[J].Electric Machines and Control,2006,10(3):287-290,29.
[6] FANG Jiancheng,LIHaitao,HAN Bangcheng.Torque ripple reduction in BLDC torquemotorwith nonideal back EMF[J].Power Electronics,IEEE Transactions on,2012,27(11):4630-4637.
[7] LU Haifeng,LEI Zhang,QU Wenlong.A new torque control method for torque rippleminimization of BLDCmotors with Un-I-deal back EMF[J].Power Electronics,IEEE Transactions on,2008,23(2):950-958.
[8] XIA Changliang,XIAO Youwen,WEIChen,et al.Torque ripple reduction in brushless DC drives based on reference currentoptimization using integral variable structure control[J].Industrial Electronics,IEEE Transactions on,2014,61(2):738-752.
[9] XIA Changliang,WANG Yingfa,SHI Tingna.Implementation of Finite-Statemodel predictive control for commutation torque ripple minimization of Permanent-Magnetbrushless DCmotor[J].Industrial Electronics,IEEE Transactions on,2013,60(3):896 -905.
[10] 杨龙,朱俊杰,王亮军,等.无位置传感器BLDCM换相转矩脉动抑制的研究[J].仪器仪表学报,2013,34(6):1285 -1292. YANG Long,ZHU Junjie,WANG Liangjun,et al.Study on commutation torque ripple suppression in BLDCM without position[J].Chinese Journal of Scientific Instrument,2013,34(6): 1285-1292.
[11] LIN Yongkai,YENSHIN L.Pulsewidthmodulation technique for bldcm drives to reduce commutation torque ripplewithout calculation of commutation time[J].Industry Applications,IEEE Transactions on,2011,47(4):1786-1793.
[12] JOONGHO S,CHOY I.Commutation torque ripple reduction in brushless DCmotor drives using a single DC current sensor[J]. Power Electronics,IEEE Transactions on,2004,19(2):312-319.
[13] 高峰,张雪锋,季学武.考虑定子电阻的无刷电机换相转矩脉动抑制[J].电机与控制学报,2010,14(10):26-31.
GAO Feng,ZHANG Xuefeng,JIXuewu.Suppression of torque ripple due to phase commutation in brushless DC motor drives considering the stator resistance[J].Electric Machines and Control,2010,14(10):26-31.
[14] 石坚,李铁才.一种消除无刷直流电动机换相转矩脉动的PWM调制策略[J].中国电机工程学报,2012,32(24):110 -116. SHIJian,LI Tiecai.A PWM strategy to eliminate commutation torque ripple of brushless DCmotors[J].Proceedings of the Chinese Society for Electrical Engineering,2012,32(24):110 -116.
(编辑:贾志超)
Novel current controlmethod to suppress commutation torque ripple for brushless DC motor
YIN Shuai1,2, LÜCai-qin3, MA Tie-hua1,2
(1.National Key Laboratory for Electronic Measurement Technology,North University of China,Taiyuan 030051,China; 2.Key Laboratory of Instrumentation Science&Dynamic Measurement of Ministry of Education,North University of China,Taiyuan 030051,China;3.School of Mechanical and Power Engineering,North University of China,Taiyuan 030051,China)
Aiming at the commutation torque ripple problem of brushless DC motor,and considering the armature resistance,a three-phase current commutation time modulation controlmethods was proposed. Themethod of“on-going phase open,off-going phase pulse width modulation,non-commutation phase maintain“control strategy was used in the motor full section during commutation.By establishing the mathematicalmodel and theoretical analysis of phase current during the commutation,the duty cycle of off-going phase relationship with themotor operating parameterswas determined,so that the slope of offgoing phase were kept equal with on-going phase to ensure no non-commutation phase current ripple. Thismethod effectively suppresses the commutation current ripple,achieves a high-speed and low-speed unified control,and avoids the problem of partition unclear.Experiment shows that the commutation currentwaveform has obvious suppression effect compared with conventional controlmethods and phase current ripple factor is suppressed in 0.1 atwhole speed range.
brushless DCmotors(BLDCM);commutation torque ripple;current control;armature resistance; whole speed range
10.15938/j.emc.2015.08.008
TM 33
A
1007-449X(2015)08-0047-06
2014-09-28
山西省基础研究计划(2013012010);山西省回国留学人员科研资助项目(2014-052)
殷 帅(1988—),男,博士研究生,研究方向为电机及其控制;吕彩琴(1968—),女,博士,教授,研究方向为电气传动控制;马铁华(1964—),男,教授,博士生导师,研究方向为动态测试与智能控制。
殷 帅
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
大电机技术(2022年5期)2022-11-17 08:12:56
莆田学院学报(2021年5期)2021-11-13 06:36:38
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
甘肃科技(2020年20期)2020-04-13 00:30:22
电子制作(2017年1期)2017-05-17 03:54:12
电测与仪表(2016年1期)2016-04-12 00:35:12
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10