基于Petri网的无刷直流电机混合导通DSP控制方法
2021-11-13 06:36詹瑜坤罗继亮郑力新孙佳伟
莆田学院学报 2021年5期
詹瑜坤,罗继亮∗,郑力新,张 兵,孙佳伟
(1.华侨大学 信息科学与工程学院,福建 厦门 361021;2.福建省电机控制与系统优化调度工程研究中心,福建 厦门 361021;3.华侨大学 工学院,福建 泉州 362021;4.南阳农业职业学院 机电工程系,河南 南阳 473000)
0 引言
无刷直流电机的驱动方式包括二二和三三导通。前者可以获得较大转矩,但是换相时易引起电流畸变,导致转矩脉动增强;后者可以降低转矩波动,提高绕组的利用率,但会使空载时平均电流增加,导致电机的效率和扭力下降。为了提升电机的驱动效率和控制精度,一般将二二导通用于精度要求不高的场合,三三导通用于所需扭力不大的场合,但某些场合需要用到两种驱动方式,所以有必要研究两种驱动方式的混合导通切换方法[1]。
无刷直流电机驱动电路的切换类型与功率管个数呈指数增长,这使得二二和三三混合导通切换控制问题非常复杂,易于出现控制逻辑错误。为此,需要对无刷直流电机的驱动电路形式化建模,以给出形式化控制方法。Petri网是描述离散事件(切换)系统的形式化工具[2-3],被广泛应用于数字逻辑控制的模型描述[4-5]。文[2]用形式化设计方法来验证和确认逻辑控制器模型;文[3]用形式化方法设计了机场行李分拣系统的监视控制器模型;文[6-7]设计了基于FPGA的无刷直流电机二二导通逻辑控制器模型;文[8]设计了基于数字信号处理(DSP)的无刷直流电机普通Petri网的二二导通逻辑控制器模型。
本文在文[8]的基础上,研究了基于谓词Petri网的二二和三三混合导通DSP逻辑控制程序设计方法,提供了两种驱动方式灵活切换的方法。首先利用功率管二二和三三导通规则,设计了两种导通模式的谓词Petri网模型;并根据两种导通之间的切换规则,设计两种Petri网模型之间的切换变迁,从而获得二二和三三混合导通的Petri网模型;进而给出了Petri网模型转换为DSP程序的方法,并进行了实验验证。相对于文[6-7]基于谓词Petri网设计二二导通无刷直流电机逻辑控制器模型,本文增加了三三导通驱动方式,提供了两种驱动方式灵活切换的方法。
1 基于Petri网的混合导通DSP逻辑控制器模型
无刷直流电机二二和三三混合导通逻辑控制器的Petri网模型由3个部分组成:第一部分是构建二二导通控制电路的Petri网模型;第二部分是建立三三导通控制电路的Petri网模型;第三部分是建立二二和三三混合导通控制电路的Petri网模型。
谓词Petri网是一个多元组G=(P,T,F,B,L),其中和普通Petri网一样,P是库所集,T是变迁集,F是库所和变迁之间全部有向弧的集合;而这里,B表示逻辑表达式集合,L表示映射函数。谓词Petri网能够更简明地表示大型普通Petri网。在谓词Petri网中,托肯被赋予了参数,变迁被赋予了逻辑表达式,只有满足某个逻辑表达式,才能确定在某个标识m下,逻辑表达式对应的变迁可以激发,以及变迁的激发对标识变化的影响,这就提高了整个网的系统模拟能力[9-10]。
无刷直流电机驱动电路采用三相全桥式驱动Y型电机绕组:VT1、VT3和VT5为上桥臂功率管,VT4、VT6和VT2为相应的下桥臂功率管,根据霍尔元件逻辑信号,按照二二导通规则或三三导通规则(表1)控制功率管VT1~VT6通断[11-13]。电机正转时霍尔信号的顺序为101→100→110→010→011→001,反转时霍尔信号的顺序为101→001→011→010→110→100。

表1 霍尔状态与换相关系(二二导通和三三导通)
1.1 二二导通控制电路的Petri网模型设计方法
在二二导通模式下,驱动电路功率管系统的状态表示为xaijp或xaijn, 其中下标a表示二二导通;p和n分别表示电机正、反转;i和j表示导通的功率管的编号;若i和j都为0,则表示所有的功率管均处于关断状态,为了简便起见,xa00p和xa00n简化表示为xa0p和xa0n。功率管系统的状态集合记为Xa={xa16p, xa12p, xa23p, …}。
无刷直流电机二二导通从一个状态切换到到下一个状态用(xa,x′a)表示,所有切换集合记为Ya= {(xa12p, xa16p),(xa16p, xa56p), …}。
二二导通从一个状态切换到到下一个状态,需要满足二二导通规则下的逻辑表达式,记作za(xa,x′a)。例如za(xa12p, xa16p)=DH1, 表示从xa12p激发到xa16p, 需要满足的切换规则为DH1,D为1(0)表示电机正(反)转,H表示霍尔元件信号值。二二导通切换规则如表2所示, S表示电源,为1(0)时表示电机通(断)电。

表2 无刷直流电机二二导通切换规则
算法1 无刷直流电机二二导通控制电路的Petri网模型设计方法。
输入:无刷直流电机二二导通所有通/断状态集合Xa,所有状态切换集合Ya和所有状态切换的逻辑表达式集合Ba
输出:无刷直流电机二二导通控制电路的Petri网模型Ga=(Pa,Ta,Fa,Ba,La,m0)

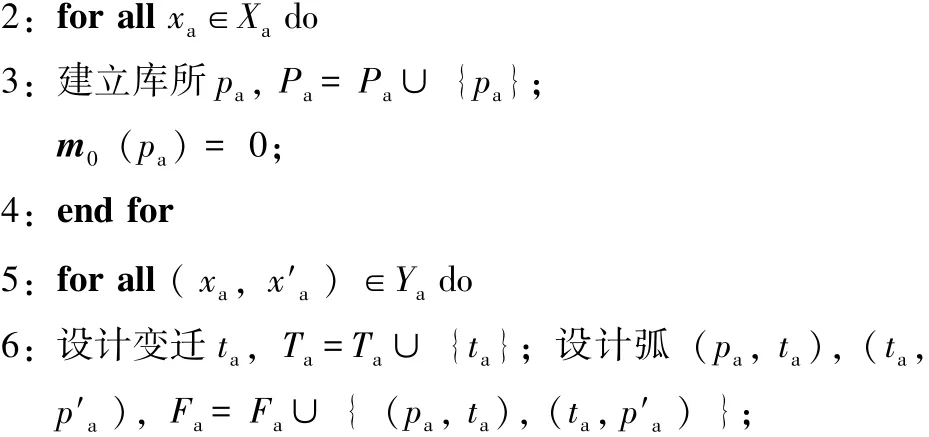
建立逻辑表达式za(xa,x′a),Ba=Ba∪{za(xa,

end for
根据算法1,设计二二导通控制电路的Petri网模型如图1所示。将无刷直流电机二二导通的每一个状态描述为1个库所pa;用切换变迁ta描述无刷直流电机二二导通从一个状态到另一个状态的切换,L(ta)表示切换规则。
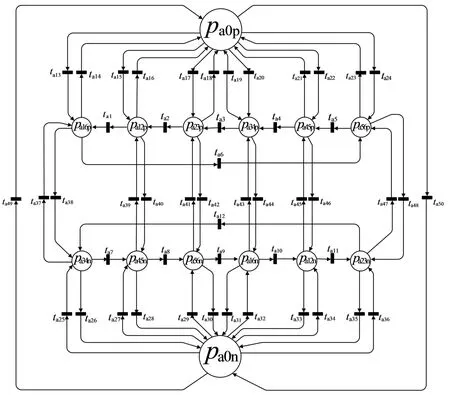
图1 无刷直流电机二二导通控制电路的Petri网模型
1.2 三三导通控制电路的Petri网模型设计方法
三三导通的Petri网模型和二二导通的相似,不同的是模型中每个库所代表3个功率管导通状态,变迁描述的激发规则不同,所以这里简单描述。
在三三导通模式下,驱动电路的功率管系统的状态表示为xbijkp或xbijkn,其中下标b表示三三导通;p和n分别表示电机正、反转;i、j和k表示导通功率管的编号;若为i、j和k都为0,则表示全部的功率管都处于关断状态,为了简便起见,xb000p和xb000n简化表示为xb0p和xb0n。功率管系统的状态集合记为xb= {xb126p,xb123p,xb234p,…}。
无刷直流电机三三导通从一个状态切换到到下一个状态用(xb,x′b)表示,所有切换集合记为Yb= {(xb123p,xb126p),(xb126p,xb156p),…}。
三三导通从一个状态切换到到下一个状态,需要满足三三导通规则下的逻辑表达式,记作zb(xb,x′b)。例如zb(xb123p,xb126p)= DH1,表示从xb123p激发到xb126p,需要满足的切换规则为DH1。
通过三三导通所有通/断状态集合Xb,所有状态切换集合Yb和所有状态切换的逻辑表达式集合Bb建立算法2,即无刷直流电机三三导通控制电路的Petri网模型设计方法,与二二导通相似。
根据算法2设计了三三导通控制电路的Petri网模型Gb=(Pb,Tb,Fb,Bb,Lb,m0)。将无刷直流电机三三导通的每一个状态描述为1个库所pb;用切换变迁tb描述无刷直流电机三三导通从一个状态到另一个状态的切换,Lb(tb)表示切换规则。
1.3 二二和三三混合导通控制电路的Petri网模型设计方法
在二二和三三混合导通模式下,驱动电路的功率管系统的状态表示为xc,包含二二导通和三三导通功率管系统所有状态以及x00(混合导通驱动电路的功率管系统启动前的状态),状态集合记为Xc= {xa16p,xb126p,xa12p,xb123p,…}。
无刷直流电机二二和三三混合导通时,从一个状态切换到到下一个状态用(xc,x′c)表示,所有切换状态集合记为Yc= {(xa16p,xb126p),(xb126p,xa16p),(xa12p,xb123p),(xb123p,xa12p),…}。
对于无刷直流电机混合导通,当从一个状态切换到到下一个状态,需要满足二二和三三混合导通切换规则,记作zc(xc,x′c)。例如zc(xa16p,xb126p)= C,表示从xa16p激发到xb126p,需要满足的切换规则为C,C为0时表示二二导通,C为1时表示三三导通。二二和三三混合导通切换规则如表3所示。
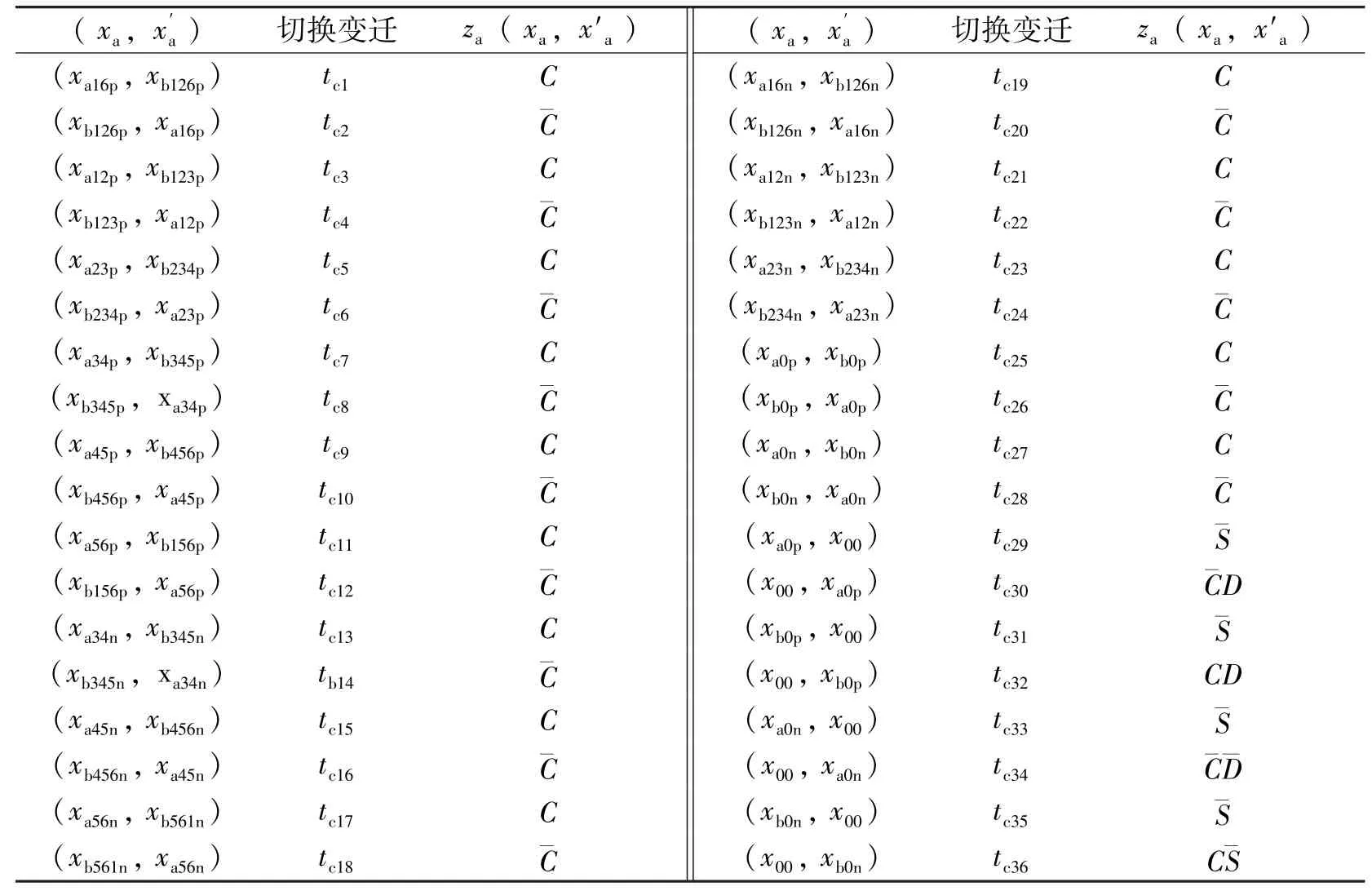
表3 二二和三三混合导通切换规则
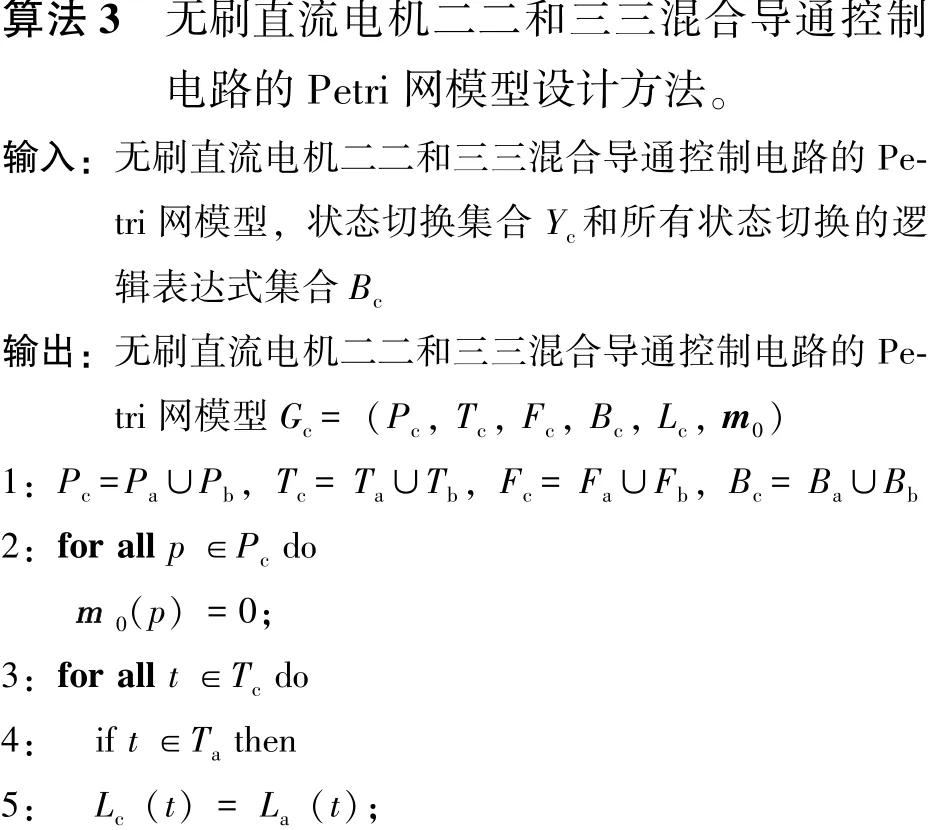
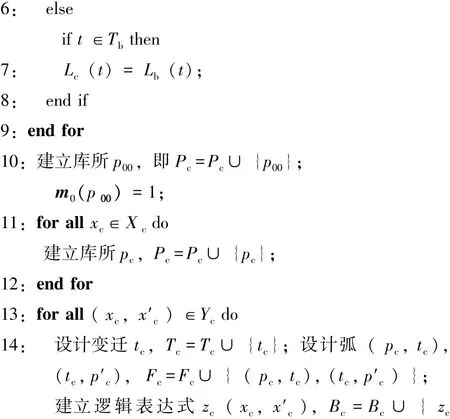

如图2所示,根据算法3,设计了无刷直流电机二二和三三混合导通控制电路的Petri网模型。将无刷直流电机二二和三三混合导通的每一个状态描述为1个库所pc,用变迁tc描述混合导通从一种状态到另一种状态的切换,Lc(tc)表示切换规则。
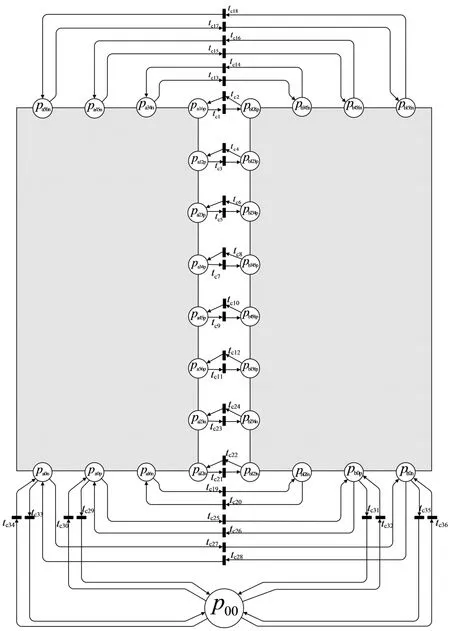
图2 无刷直流电机二二和三三混合导通的控制电路的Petri网模型
在获得无刷直流电机二二和三三混合导通控制电路的Petri网模型后,对初始标识m0、前置关联矩阵C-和后置关联矩阵C+进行定义,程序运行过程中的状态迁移可通过程序生成的状态可达图完整呈现。
根据可达图算法可以检验换相逻辑是否正确,若否则重新设计混合导通系统的Petri网模型。
2 混合导通控制程序的DSP设计方法
根据二二和三三混合导通控制电路的Petri网模型设计二二和三三混合导通的DSP逻辑控制程序:借助变迁激发规则,切换到不同的驱动方式,从而确定功率管的导通顺序,然后通过速度环比例积分(PI)控制器进行脉冲宽度调制(PWM)来控制电机的转速。本实验用的功率管为低电平导通,当速度增大时,根据反馈值,PI控制器增大PWM的高电平宽度,从而减小输出电压,转速降低;当转速减小时,PI控制器增大PWM的低电平宽度,输出电压增大,转速升高。
算法4 根据无刷直流电机二二和三三混合导通控制电路的Petri网模型设计无刷直流电机二二和三三混合导通的DSP逻辑控制程序方法。
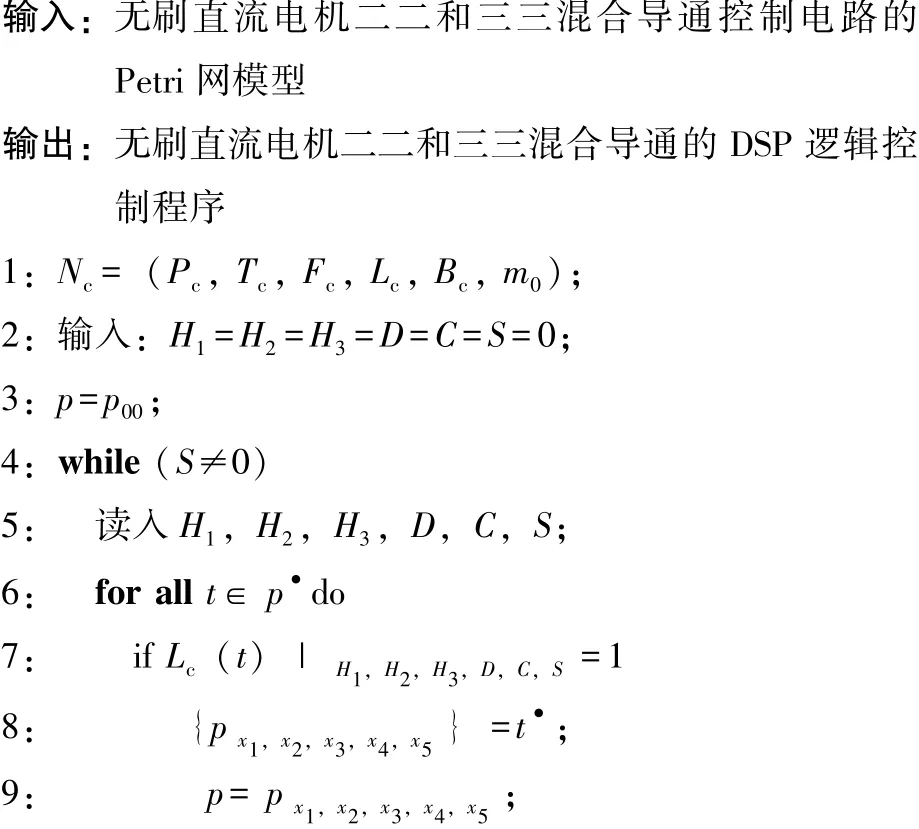

把控制程序与表1一一对应验证,证明控制逻辑是正确的。
3 实验分析
图3 是搭建的实验系统,系统主要由开发板F28335、驱动电路BLDC-V2、光电编码器、磁粉制动器及无刷直流电机组成。运行开发板上的二二和三三混合导通的DSP逻辑控制程序,完成了二二导通正反转切换,三三导通正反转切换,二二导通和三三导通正转互相切换,二二导通和三三导通反转互相切换实验。电机依次做如下切换:二二导通正转→二二导通反转→三三导通反转→三三导通正转→三三导通反转→二二导通反转→二二导通正转,转速波形如图4所示。
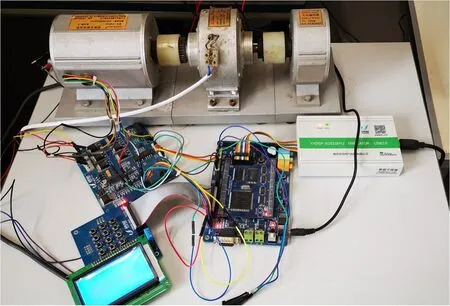
图3 无刷直流电机控制实验装置

图4 无刷直流电机二二导通和三三导通切换的转速波形
4 结语
本文给出了无刷直流电机混合导通Petri网模型,严格描述了功率管通断控制逻辑,从而保证了无刷直流电机逻辑控制程序的正确性和可靠性,同时可以降低逻辑控制程序的调试工作量。下一步的工作是研究电流环的设计,完善电机的控制精度。
猜你喜欢
电子科技(2022年10期)2022-10-15
汽车实用技术(2022年12期)2022-07-05
科学与财富(2020年24期)2020-10-27
汽车维护与修理(2019年7期)2019-09-18
科学与财富(2019年11期)2019-08-06
汽车维护与修理(2019年1期)2019-07-09
速读·下旬(2019年3期)2019-04-11
汽车维护与修理(2018年5期)2018-09-29
电机与控制学报(2018年9期)2018-05-14
汽车维护与修理(2018年15期)2018-02-22