一种变增益宽速度范围的永磁同步电机无位置传感器控制
2015-06-27 05:50:58张磊高春侠
电机与控制学报 2015年8期
张磊, 高春侠
(中国石油大学(华东)信息与控制工程学院,山东青岛266580)
一种变增益宽速度范围的永磁同步电机无位置传感器控制
张磊, 高春侠
(中国石油大学(华东)信息与控制工程学院,山东青岛266580)
针对永磁同步电机宽速度范围的运行需求,提出一种变滑模增益参考自适应(MRAS)无位置控制技术。采用模糊控制器对PI参数的调整作用,可在电机高、中低速时都有良好的动稳态性能,抑制了角度的低速振荡并减小了高速延迟,提高了高速永磁同步电机宽速度域内的转子位置检测精确度。与传统PI模型参考自适应观测器相比,此方法更适合转速高、调速范围宽、反电动势系数小的高速永磁同步电机转子位置检测。
永磁同步电机;变滑模增益;参考自适应;观测器
0 引 言
永磁同步电机具有很高的功率密度、效率和功率因数,在电动汽车、航空、航海等体积受限的工业领域获得较大的应用。为了获得更高的体积功率密度,不断提升转速是一个切实可行的有效途径[1]。然而,随着转速的提高,传统旋转变压器或编码盘等转子位置检测装置的精确度、安装和机械强度已不能满足要求。因此,相关文献为实现稳定、可靠运行的永磁同步电机无位置传感器控制进了研究工作。
文献[2]研究了基于反电势观测和INFORM (低速时)的复合模型,搭建了四阶观测器并进行了稳定性分析和参数选择,其切换策略具有一定参考价值,研究结论并没有考虑参数变化对系统观测模型的影响。文献[3-5]则提出一种扩展反电势的方案简化观测问题。但此项的提取仍存在需要克服的难点:需要借助低通滤波环节将滑模控制中高频信号去除,势必引入相位延迟问题,限制了在高速领域的应用。文献[6]提出了一种降阶Luenberger观测器来观测转子磁链并获得转速,该方案结构简单且与机械参数无关,结果显示在中低速和高速均可获得较理想效果。但其原理决定其在接近零速区域无法获得良好的观测性能,同时初始位置检测也难以实现。
文献[7-8]则应用卡尔曼滤波法实现永磁同步电机的转子位置检测,并对卡尔曼滤波法加入了自调优算法。但此种方法存在大量的矩阵运算,对微处理器的性能也有较高的要求[9-10],同时雅可比矩阵计算花费大量时间,并带来稳定性问题,并不实用。
同时,文献[11-12]等利用内置式永磁电机的凸极效应,向定子中注入一个高频信号来获得转子信号,适合于低速和零速下情况。但在高速下,所注入的高频信号频率要很高,很难用数字控制器实现。并且该方法只能用在内置式永磁同步电机或经过特殊结构设计的表贴式永磁同步电机上,对于高速永磁同步电机的高转速区域转子位置检测有一定困难。
文献[13-14]提出了一种基于截止频率可调的滤波器的滑模观测器、迭代滑模观测器以及可调边界层的滑模观测器,在一定程度上削弱了滑模观测器的抖振[13-15],但这些方法缺乏一定的主动性。
因此,虽然无位置传感器控制方案的研究是电机控制研究领域的一个研究热点,但研究重点主要局限在中速范围内,而对于接近零速以及高转速范围在相关文献中的方案并不完善,需要加以解决。
本文提出了一种基于模糊滑模观测器的转子位置检测方法,将模糊控制与滑模观测器结合起来,通过模糊控制器主动改变滑模增益K的大小,具有较好的低速抖振抑制效果,且能保证滑模观测器在电机高速时的稳定性。该方案适用于调速范围宽、反电动势系数小的高速永磁同步电机。通过仿真和试验分析,证明了该方法可以提升高速永磁同步电机的位置检测精确度。
1 变增益滑模观测器数学模型
由高速永磁同步电机的电流模型可得



其中:iˆs是is的估计值,Ksw为滑模增益,Ksw由模糊控制系统给定。滑模观测器的切换函数可以定义为

从而可得转子位置为:

对反电动势进行积分,可得定子两相坐标系下的转子磁链ψα,ψβ。
设eα=-A sin(ωˆt),eβ=A cos(ωˆt)经积分可得
2 变增益滑模系统设计
2.1 数学模型
应用模糊控制器实现对滑模增益的设定,模糊控制系统的输入变量为其中
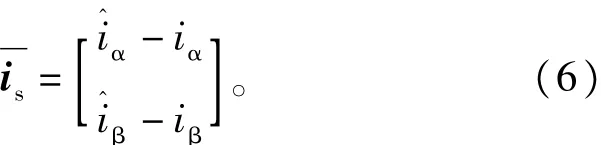
图1 系统输入偏差E及其隶属函数Fig.1 Input E and itsmembership function

图2 系统偏差变化率p E及其隶属函数Fig.2 Input p E and itsmem bership function
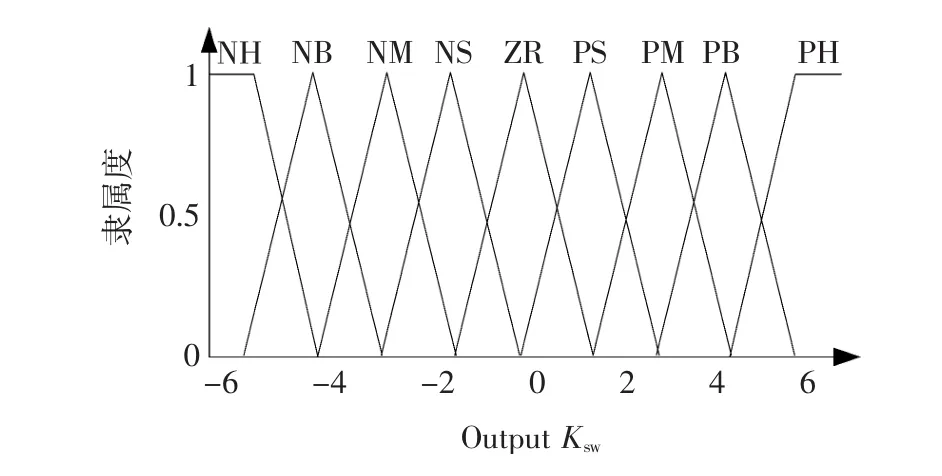
图3 输出变量Ksw及其隶属函数Fig.3 Output Kswand itsmembership function
图4 为由模糊推理规则获得的模糊控制输入输出关系。从图中可以看出,输出Ksw与输入is的关系近似是对饱和函数的分段线性逼近,但该饱和函数的形状因另一输入的不同而有所改变。若正向增大,Ksw正向增大;若正向减小,Ksw正向减小。这种对增益的控制方式,能够比饱和函数更有效地抑制抖振,甚至可以省去低通滤波器,提高系统的动态性能,降低系统的稳态误差。
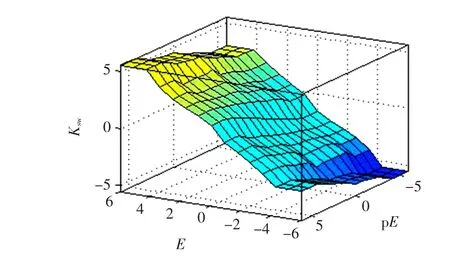
图4 模糊控制的输入输出关系Fig.4 Relationship of the output-input for fuzzy control

式中Ke为PMSM的反电动势系数;η为经验系数,一般取1.1~1.3,以使Ksw满足滑模观测器的稳定条件。当转速不高于ω0(临界转速)时,K取常值K0;当转速高于ω0时,为了保证观测精确度,Ksw的边界值K随转速的增大而增大。
2.2 稳定性分析
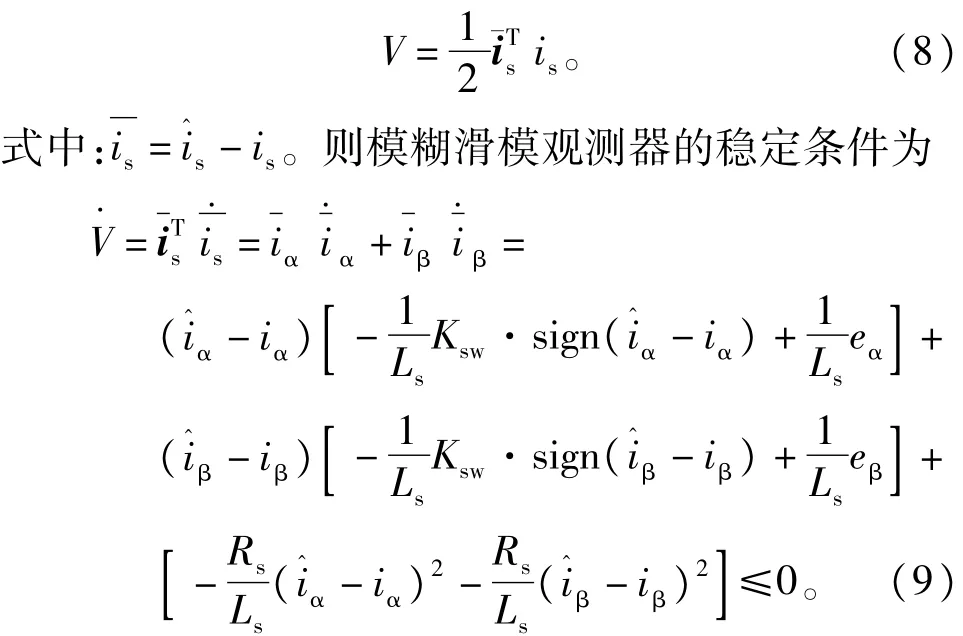
为了证明模糊滑模观测器的稳定性,构造李亚普诺夫函数为
为了更有效地抑制PMSM转子位置滑模观测器的抖振,根据高速永磁同步电机的转速来调整模糊控制输出增益Ksw的边界厚度K。在保证滑模观测器动静态性能的同时,进一步降低其抖振。Ksw的边界K取值为
式(9)中第三项恒小于等于0,因此Ksw需满足条件:

因此,只要满足模糊控制器输出Ksw的边界值K大于反电动势幅值的最大值即可保证模糊滑模观测器的稳定性。
3 仿真分析
搭建系统Simulink仿真模型来验证模糊滑模观测器法的可行性。
图5为高速永磁同步电机利用模糊滑模观测器以及普通滑模观测器,在低速区域500 r/min仿真波形。从仿真结果来看,由于模糊控制器对滑模观测器的滑模增益的控制作用,模糊滑模观测器对低速抖振有很好的抑制作用。
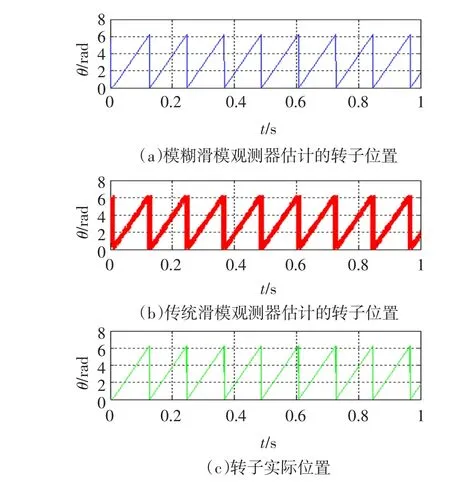
图5 低速区域(500 r/m in)转子位置检测仿真波形Fig.5 Simulation curve of the rotor's position in low speed region(500 r/m in)
图6 为高速永磁同步电机运行在高速状态时两种位置检测方法的对比。
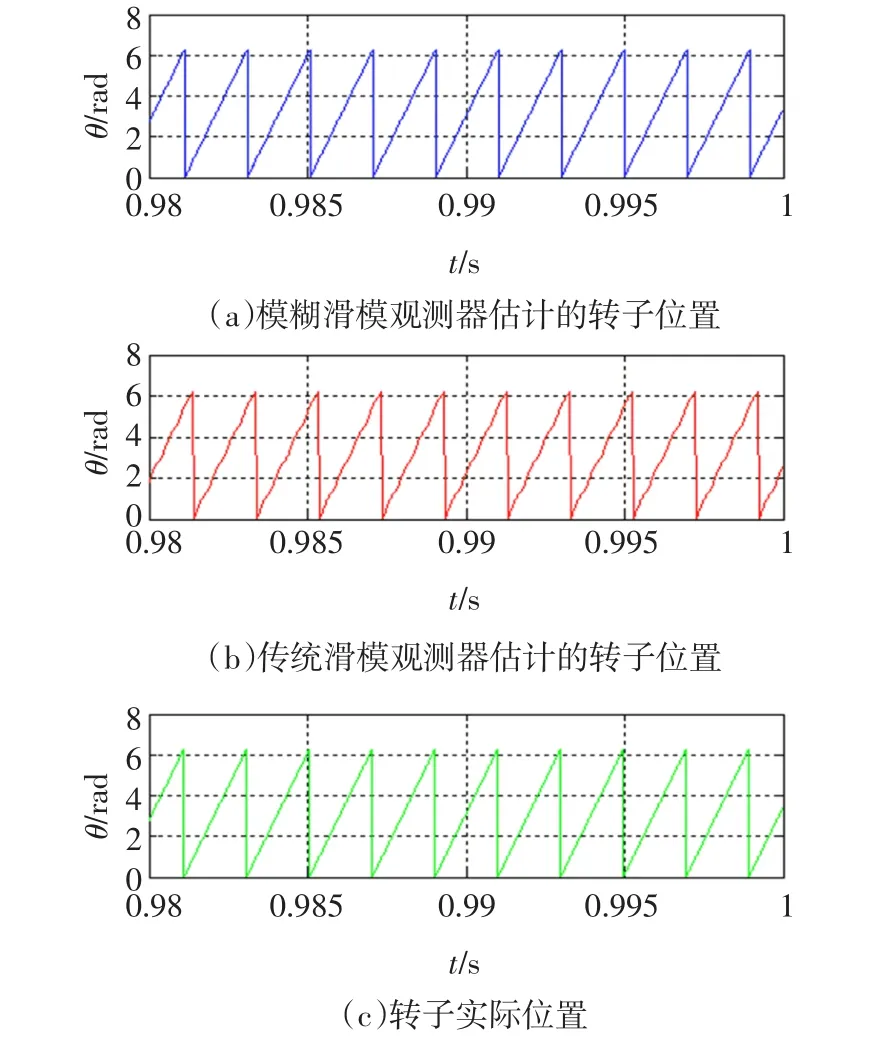
图6 高速区域转子位置检测仿真波形(30 000 r/m in)Fig.6 Simulation curve of the rotor's position in high speed region(30 000 r/m in)
可以看出当电机转速升高后,普通滑模观测器由于滑模增益过小,会出现失稳及相位延迟的问题,而模糊滑模观测器由于模糊控制器对滑模增益的调节作用,仍能很好地跟踪电机的转子位置。
4 实验结果分析
为验证基于转子位置检测方法的正确性,下面对基于模糊MRAS的转子位置检测方法实验结果进行分析。
图7为低速(500 r/min)时基于模糊MRAS观测器以及基于普通MRAS观测器的实验波形图(图中的矩形波为电机安装的离散霍尔传感器信号,其上升沿延迟于电机A相反电动势30度电角度)。从图中可以看出,在低速时,由于模糊控制器对PI参数的调节作用,模糊MRAS观测器所检测的转子位置角度振荡幅度远小于普通MRAS观测器检测的转子位置角度振荡幅度。
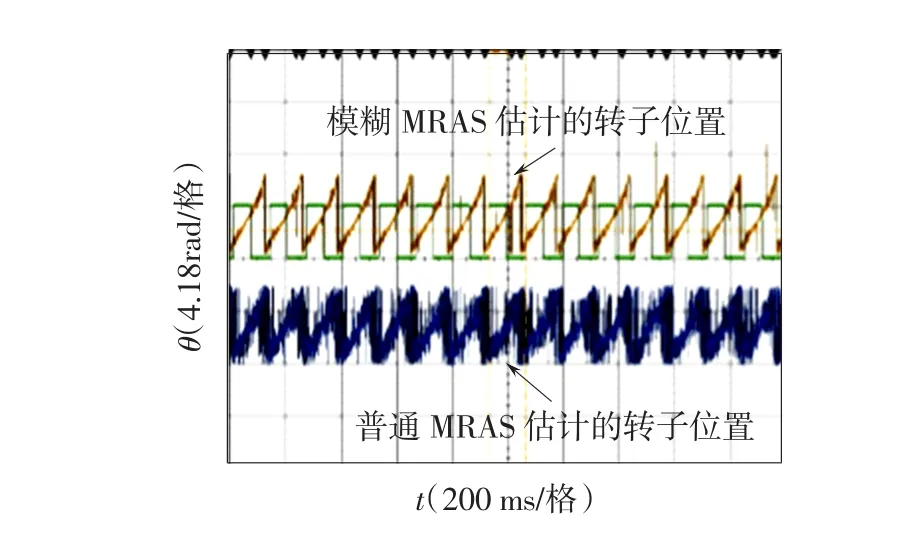
图7 低速模糊MRAS以及普通MRAS观测器的转子位置估计波形(500 r/m in)Fig.7 W aveform of the rotor's position in low speed region(about 500 r/m in)for fuzzy MRAS and normal MRAS
图8 为中低速(2 000 r/min)时基于模糊MRAS观测器以及基于普通MRAS观测器的实验波形图。从图中可以看出,在中低速时,模糊MRAS观测器与普通MRAS观测器都可以较好检测转子位置。
图9为21 000 r/min时基于模糊MRAS观测器以及基于普通MRAS观测器的实验波形图。从图中可以看出,当转速升高时,由于普通MRAS观测器的观测精确度不再满足系统要求,其所检测的转子位置有一定延迟,并且随着转速增加,角度延迟更严重。相比而言,模糊MRAS观测器由于模糊控制器对PI参数的调节作用,仍然有较好的动态性能,可以有效减小了转子位置的相位延迟,较好地跟踪转子实际位置。
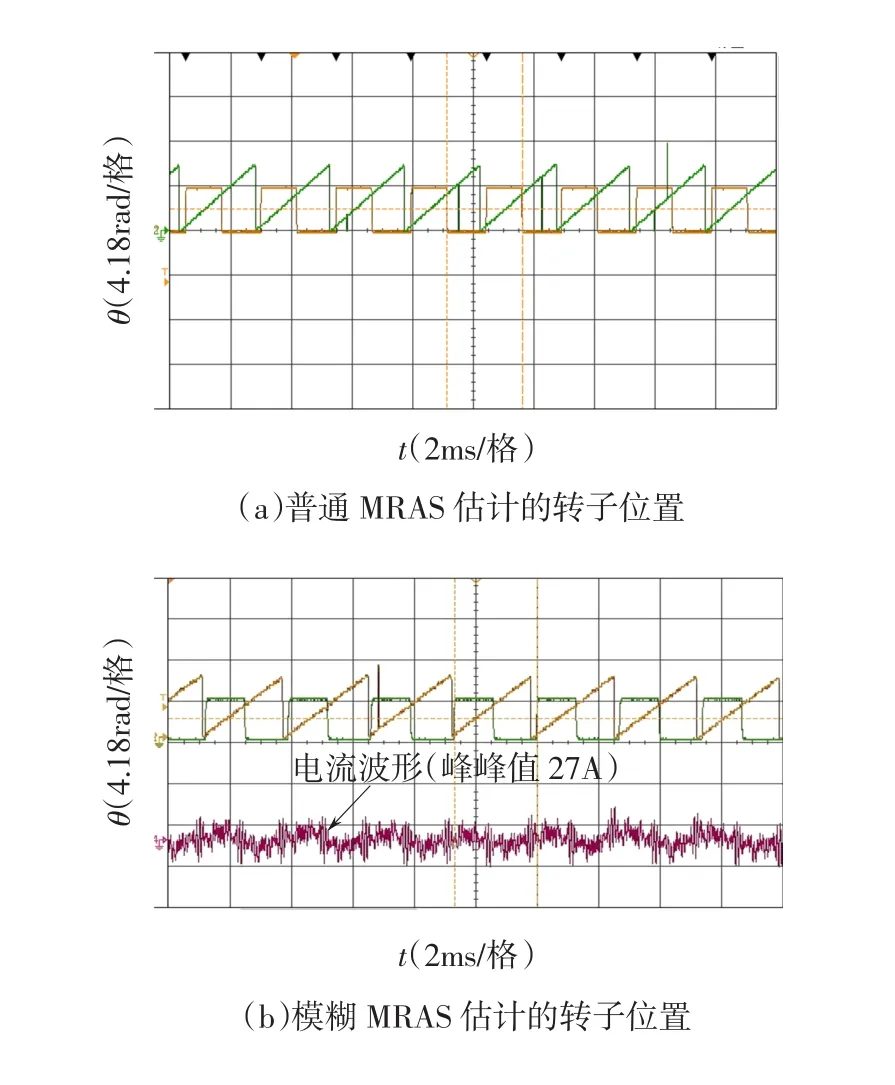
图9 模糊MRAS观测器及普通MRAS观测器的波形图(21 000 r/m in)Fig.9 W aveform of the rotor's position in high speed region for fuzzy MRAS and norm al MRAS(21 000 r/m in)
通过实验结果可以看出:传统基于MRAS的转子位置观测器对电机转子的位置检测在低速时存在小幅振荡,高速时存在延迟;而文中所提出的基于模糊MRAS的转子位置观测器,其模糊控制器可以实时的调整PI参数,在低速时能抑制振荡,高速时能减小相位延迟,有效地提高了高速永磁同步电机的转子位置检测精确度。实验证明,该方法能够满足调速范围宽、反电动势系数小的高速永磁同步电机的矢量控制。
5 结 论
综上所述,本文提出一种适用于永磁同步电机的变滑模增益参考自适应观测器。采用模糊控制器对PI参数的调整作用,在电机高、中、低速时都有良好的动稳态性能,抑制了角度的低速振荡并减小了高速延迟,提高了高速永磁同步电机宽速度域内的转子位置检测精确度。与传统PI模型参考自适应观测器相比,此方法更适合转速高、调速范围宽、反电动势系数小的高速永磁同步电机转子位置检测。
仿真和实验结果都证明本方案,均具有较强的稳定性,因此具有较高的应用价值。
[1] HUANG Surong,LUO Jian,LEONARDIF.A general approach to sizing and power density equations for comparison of electricalmachines[J].IEEE Transactions on Industry Applications,1998, 34(1):92-97.
[2] SCHRODL M,HOFER M,STAFFLER W.Extended EMF and parameter observer for sensorless controlled PMSM-machines at low speed[C]//2007 European Conference on Power Electronics and Applications,Sept2-5,2007:1-8.
[3] MORIMOTO S,KAWAMOTO K,SANADA M.Sensorless control strategy for salient-pole PMSM based on extended EMF in rotating reference frame[J].IEEE Transactions on Industry Applications, 2002,38(4):1054-1061.
[4] 张细政,王耀南,杨民生.永磁同步电机无位置传感器双滑模鲁棒控制[J].电机与控制学报,2008,14(3):696-700. ZHANG Xizheng,WANG Yaonan,YANG Minsheng.Doublysliding-mode based sensorless robust control of PMSM[J],Electric Machines and Control,2008,14(3):696-700.
[5] 王高林,杨荣峰,于泳.内置式永磁同步电机无位置传感器控制[J].中国电机工程学报,2010,30(30):93-98. WANG Gaolin,YANG Rongfeng,YU Yong.Position sensorless control for interior permanentmagnet synchronousmotor[J].Proceedings of the CSEE,2010,30(30):93-98.
[6] CHAN T F,WANGW,BORSJE P.Sensorless permanent-magnet synchronousmotor drive using a reduced-order rotor flux observer[J].LET Electric Power Applications,2008,2(2):88-98.
[7] SILVERIO Bolognani,LUCA Tubiana,MAURO Zigliotto.Extended Kalman filter tuning in sensorless PMSM drives[J].IEEE Transactions on Industry Applications,2003,29(6):1741 -1747.
[8] MOHAMED Boussak.Implementation and experimental investigation of sensorless speed controlwith initial rotor position estimation for interior permanentmagnet synchronousmotor drive[J].IEEE Transactions on Power Electronics,2005,20(6):1413-1422.
[9] SILVERIO Bolognani,ROBERTO Oboe,Mauro Zigliotto.Sensorless full-digital PMSM drive with EKF Estimation of speed and rotor position[J].IEEE Transactions on Industrial Electronics,1999,46(1):184-191.
[10] 邱忠才,郭冀岭,王斌,等.基于卡尔曼滤波滑模变结构转子位置观测器的PMSM无差拍控制[J],电机与控制学报,2014,18(4):60-65,71. QIU Zhongcai,GUO Jiling,WANG Bin,et al.Deadbeat predictive current control based on a slidingmode observerwith Kalman filter for PMSM speed and rotor position[J].Electric Machines and Control,2014,18(4):60-65,71.
[11] 贾洪平,贺益康.基于高频注入法的永磁同步电动机转子初始位置检测研究[J].中国电机工程学报,2007,27(15): JIA Hongping,HE Yikang.Study on inspection of the initial rotor position of a PMSM based on high-frequency signal injection[J].Proceedings of the CSEE,2007,27(15):
[12] 邓先明,马志勋,李新宇.转子注入高频的同步电机无传感器控制[J].电机与控制学报,2010,14(10):61-67. DENG Xianming,MA Zhixun,LI Xinyu.Sensorless control of synchronousmotor based on high-frequency signal injection into the rotor[J].Electric Machines and Control,2010,14(10):61 -67.
[13] KIM HONGRYEL,SON Jubum,LEE Jangmyung.A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J].IEEE Transactions on Industrial Electronics,2011,58(9) 4069-4977.
[14] KANG Kye-Lyong,KIM Jang-Mok,HWANG Keun-Bae,et al. Sensorless control of PMSM in high speed range with iterative slidingmode observer[J].Applied Power Electronics Conference and Exposition,2004:1111-1116.
[15] 左瑜君,滕青芳.基于变结构模型参考自适应观测器的永磁同步电机无速度传感器矢量控制[J],科学技术与工程,2014,14(9):49-53. ZUO Yujun,TENG Qingfang.Sensorless vector control for pmsm system based on variable structure MRAS observer[J].Science Technology and Engineering,2014,14(9):49-53.
(编辑:刘素菊)
Research on variable gain w ide speed region sensor-less control theme for permanentmagnet synchronousmotors
ZHANG Lei, GAO Chun-xia
(College of Information and Control Engineering,China University of Petroleum(East China),Qingdao 266580,China)
In order tomeet the needs of wide region operation for permanentmagnet synchronousmotors (PMSMs),a variable gain sliding-modemodel reference adaptive system(MRAS)sensor-less controller was proposed.Making use of fuzzy controller to adjust the parameters of PI regulator,good steady state and dynamic performance was achieved in high,middle and low speed region,and the low-speed angle oscillation in low speed region was attenuated,the speed delay was reduced,and the rotor position detection precision of the high-speed permanentmagnet synchronousmotor in wide speed region was increased. Compared with the traditional PImodel reference adaptive observer,thismethod ismore suitable for high speed,wide speed range,and small back-EMF coefficient permanentmagnet synchronousmotor rotor position detection.
permanentmagnet synchronousmotors;variable sliding-mode gain;model reference adaptive system; observer
10.15938/j.emc.2015.08.006
TM 351
A
1007-449X(2015)08-0036-05
2014-05-15
中央高校基本科研业务费专项资金(13CX02097A);国家自然科学基金(51207170)
张 磊(1977—),男,博士,讲师,研究方向为永磁同步电机优化设计及其控制技术;高春侠(1977—),女,硕士,副教授,研究方向为电机驱动与电力电子技术。
张 磊
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
汽车电器(2019年2期)2019-03-22 03:35:16
光学精密工程(2016年3期)2016-11-07 09:03:49
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年11期)2014-04-04 09:21:36
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54