
电动推杆驱动串联双铰链柔性机械手的状态分析
2015-06-12 01:57:10陈春华田志伟杨光照
机械制造 2015年2期
□ 陈春华 □ 章 军 □ 田志伟 □ 杨光照
江南大学 机械工程学院 江苏无锡 214122
针对轻工和食品行业的大规模生产状况,为满足形状复杂、物性多样的原材料、半成品、成品的物流和包装的需要,并解决简单劳动的用工成本、劳动条件差等问题,需要柔性机械手来抓取。特殊物体可分类为:①易变形的软性物体(面包、软包装物品);②易碎的脆性物体(禽蛋、玻璃陶瓷制品);③现状不规则、大小差别大的物体(瓜果、蔬菜);④异形的、位置状态混乱且难以理顺的物体(酒瓶、化妆品瓶)。这些特殊物体,材料性质、形状尺寸及位置状态差别较大。传统机械手为夹钳式或平行移动式结构,只能抓取结构形状大小一样的、不会破损的刚性工件[1]。仿人灵巧手需要感知特殊物体的空间形状位置,精确地控制运动和抓取力,其成本较高,控制困难,目前还在实验室研究阶段[2-5]。柔性关节机械手有以串联双铰链为骨架和以板弹簧为骨架的两种形式,自适应即优化两个扭弹簧和机械手结构参数后,对形状、尺寸、材料变形等特殊物体,能通过两个含扭弹簧铰链的相互协调,满足抓取特殊物体、但不必精确控制各铰链角位移。目前柔性关节机械手大多以气压为驱动,存在控制精度低、抓取物体通用性不够好等缺点[6-7]。
本文介绍的新型主动柔性自适应机械手采用电动推杆驱动,在柔性自适应的基础上,能调节机械手初始张开大小,能精确调整抓取驱动力。
针对抓取特殊物体,通过优化关节尺寸以及扭弹簧参数,使机械手既能可靠抓取形状和尺寸变化、材质不同的特殊物体,又不至于把特殊物体损坏,可以代替很多的人力工作。
1 机械手的关节结构及工作原理
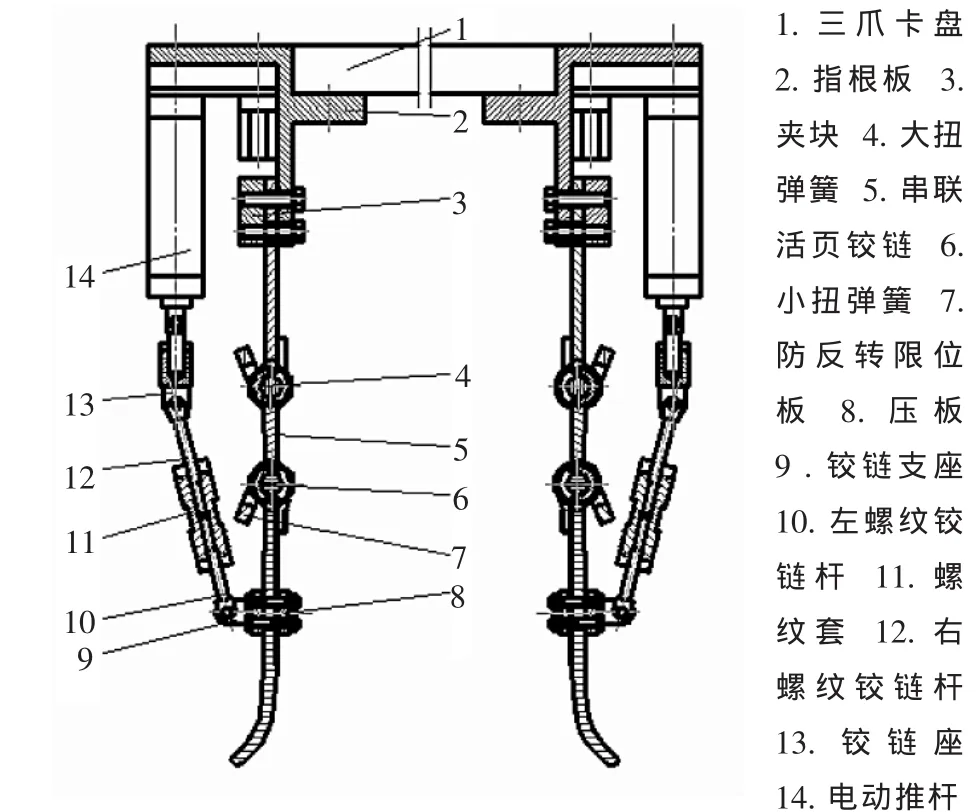
▲图1 机械手手指关节图
图1 为机械手关节的结构模型图,电动推杆14的尾座用螺钉固定在指根板2上,电动推杆的头端与铰链座13螺纹连接、并用螺母旋紧防松;串联活页铰链5的上活页被螺栓螺母固定在指根板和夹块3之间,下活页被螺栓螺母固定在压板8和铰链支座9之间,下活页最下端的曲面段是抓取段,便于接触被抓取物体,串联活页铰链的两个心轴上分别装有大扭弹簧4和小扭弹簧6;电动推杆头端的铰链座与右螺纹铰链杆12之间是铰链连接,铰链支座与左螺纹铰链杆10之间是铰链连接,左螺纹铰链杆和右螺纹铰链杆均旋在螺纹套11内,并用螺母旋紧防松;顺、逆时针旋转螺纹套,可使左、右螺纹铰链杆之间的距离增加或缩短。
抓取复杂对象的接触处在串联活页铰链下活页的曲面段。大扭弹簧和小扭弹簧的特性参数和预紧角优化后,两个铰链(支座)、串联活页铰链的两个铰链处共4个角位移的协调,为柔性自适应抓取提供了基础。
电动推杆通电,其推杆向下运动,从而驱动二力杆(由左、右螺纹铰链杆、螺纹套组成),克服大扭弹簧和小扭弹簧的弹性力,使串联活页铰链转动,其下活页的曲面段接触被抓物体;电动推杆继续运动,大扭弹簧和小扭弹簧变形增加,抓取力也增加;当达到要求的抓取力时,电动推杆断电,其内部螺杆螺母机构自锁,可保持抓取力不变。
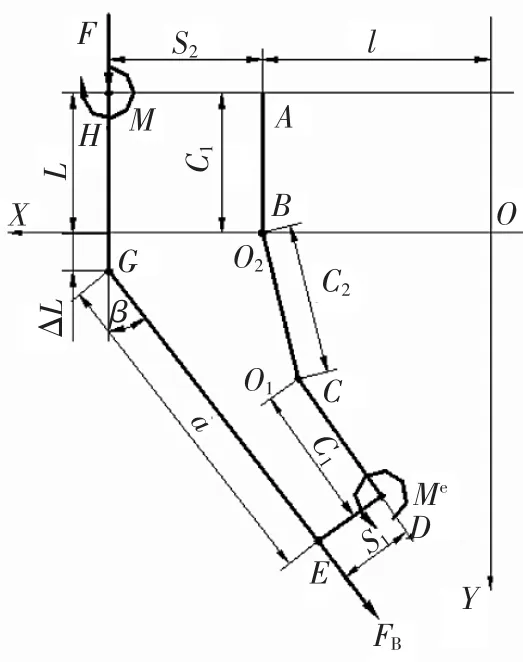
▲图2 机械手示意图
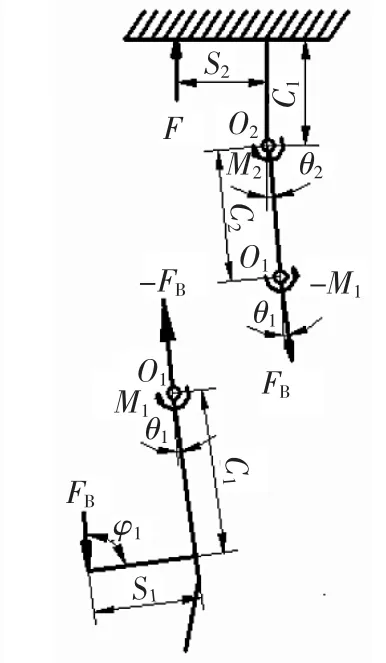
▲图3 机械手受力示意图
2 柔性关节模型状态分析
2.1 机械手静态模型分析
机械手的结构可以简化为图2所示,O1、O2点(即为C、B点)为串联活页铰链的中心,以手抓中心所在垂线为Y轴、过O2(即B点)的水平线为X轴,Z轴垂直纸面向外,建立如图2坐标系。
假设各运动副摩擦力和各部件重力忽略不计;扭弹簧除外,其余部件为刚体,图3为手指受力示意图,在电动推杆作用下,铰链O1与O2扭矩平衡方程为:

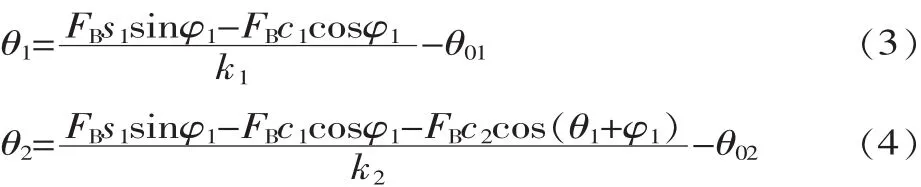
式中:M1、M2为扭弹簧扭矩,N·mm;k1、k2为弹簧的刚度,N·mm/rad;θ01、θ02为扭弹簧预紧角,rad;θ1、θ2为扭弹簧扭转角,rad;FB为二力杆的推力,N;φ1为二力杆与头座的夹角,rad;c1为机械手指指关节长,mm;c2为O1与O2铰链中心距,mm;s1为活页铰链板的偏心距,mm。
从式(1)和式(2)中可以得出 θ1与 θ2的大小:
在X-Y坐标系中,由解析几何可知,过A、B点的直线方程为:

式中:l为机械手指离手掌中心的距离,mm。
同理由解析几何可知,过B、C的直线方程为:

从式(5)、式(6)中得出改变F的大小来实现机械手手指张开度的大小,求出机械手运动状态。
2.2 机械手驱动分析
在电动推杆驱动机械手时,机械手要实现主动柔性自适应,要对电动推杆中的无刷直流电机进行转矩上的控制。
当无刷直流电机在120°导通工作方式下,不考虑换相暂态过程,三相Y接定子绕组中仅有两相流过电流,其大小相等且方向相反。则无刷直流电机的电磁转矩Te与电流i的关系为:

式中:Te为电磁转矩,N·m;KT为电机转矩系数,N·m/A;i 为稳态时的绕组相电流,A[8-9]。
在直线推杆中,扭矩T与推力F的关系为:

式中:T 为电动推杆扭矩,N·m;F 为电动推杆推力,N;S为推杆丝杆导程,mm;η为电动推杆综合传动效率[10]。
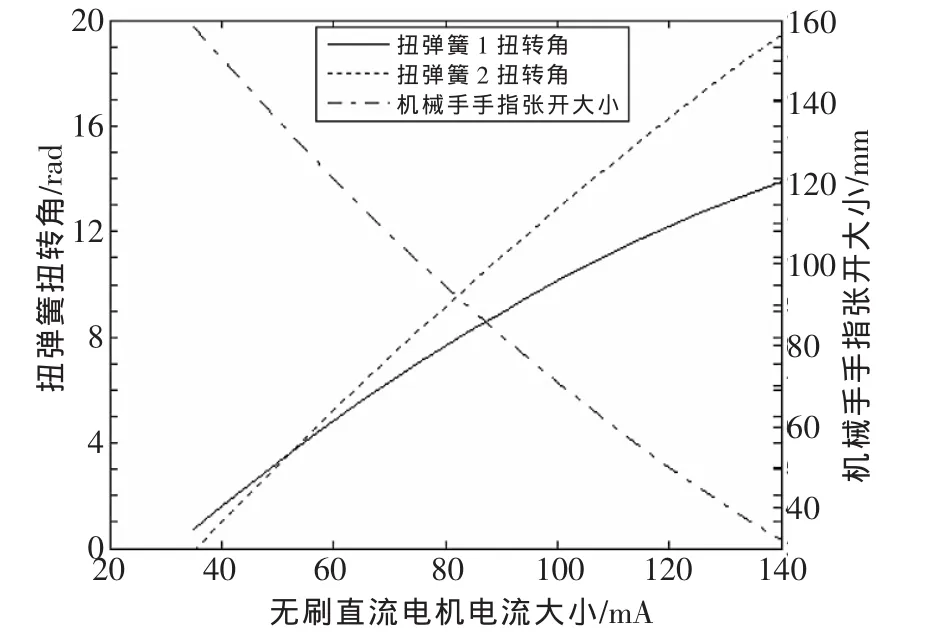
▲图4 电流与扭转角度和机械手手指张开大小的关系
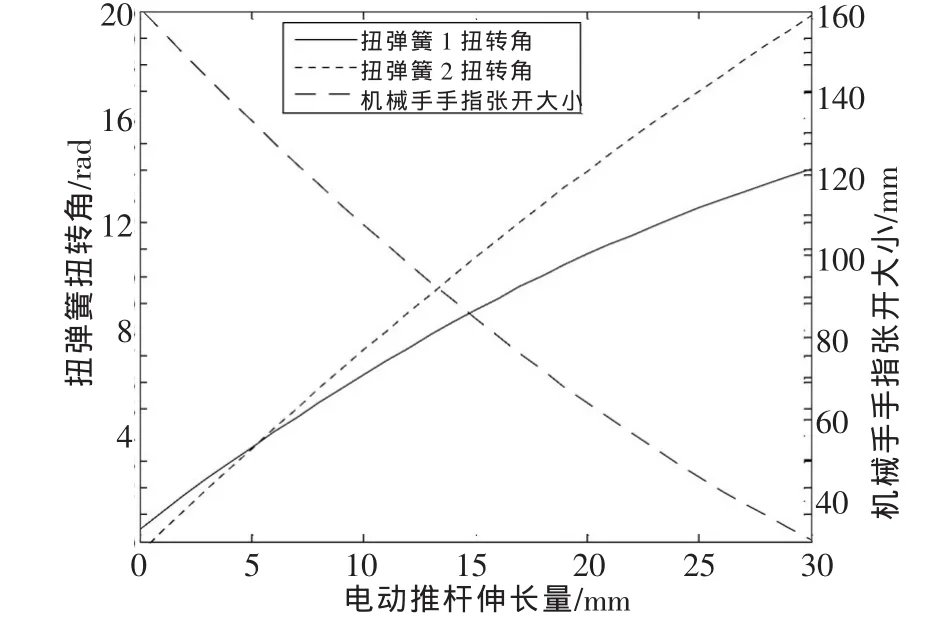
▲图5 电动推杆伸长量与扭转角度和机械手手指张开大小关系
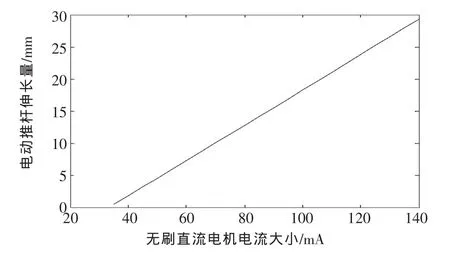
▲图6 无刷直流电机电流大小与伸长量的关系
在上述模型中,假设:①电动推杆作用力以力和力偶的形式作用在扭弹簧上,各运动副的摩擦阻力忽略不计;②除扭弹簧外的所有零件均视为刚体;③所有零件重力与惯性的影响忽略不计;④无刷直流电机忽略转子转动惯量、黏滞摩擦系数。
电动推杆的输出力F和无刷直流电机电流i的关系为:

由图可以看出,电动推杆输出力F与作用在手爪上的力FB的关系为:

在机械手结构中,β可以看作随自变量θ1和θ2变化, θ1、θ2和 β 的关系为:

式中:s2为电动推杆离手指关节的距离,mm;
以三指柔性机械手为例,机械手手指可以张开大小为:

式中:d为机械手手指张开大小,mm;u为圆弧切点沿指节方向到二力杆铰链支座距离,mm。
3 模型的数学计算
手指尺寸:l=80 mm,c1、c2=60 mm,s1=20 mm,s2=45 mm,u=20 mm,a=112.8 mm。扭弹簧参数:k1=1 503.946 N·mm/rad,θ01=0.110 064 rad,k2=2 109.970 N·mm/rad,θ02=0.125 016 rad,电动推杆:丝杆导程S=2 mm,综合传动效率η=0.67,电机转矩系数KT=0.08 N·m/A。
通过Matlab中的fsolve函数对机械手的2个扭转角度进行计算,得出电流与扭弹簧扭转角度的关系[11],进而得出:无刷直流电机电流与机械手手指张开大小的关系,推杆伸长量与扭转角度和机械手手指张开大小的关系,无刷直流电机电流与推杆伸长量的关系。
从图4中得知,根据特殊物体在视频上的大致尺寸,改变电流大小,可以调节机械手手指张开大小,从而快捷地抓取物品。从图5中得知,控制电机转动圈数,算出电动推杆伸长量,可以更加精确地控制机械手手指张开大小,从而快捷地抓取物品。
图6为无刷直流电机电流大小与伸长量的关系,可以通过已知的电流大小,求出电动推杆伸长量大小。
4 结论
柔性关节机械手以电动推杆为驱动,与现有的以气缸伸长为驱动的和以绳牵引为驱动的柔性机械手相比,产生的驱动力和抓取力大;靠电动推杆反向运动,而不靠扭弹簧作用回复的初始状态;对材料性质、形状尺寸及位置状态差别较大的复杂对象,可改变机械手手指初始张开大小,这样既保证了柔性自适应的可靠抓取,又不会损坏物体,通用性好;采用直流驱动的微型电动推杆,具有低速运行稳定、动态性能良好、效率高等优点。
本文通过对柔性关节机械手的结构设计和受力分析,结合无刷直流电机的工作特性,运用Matlab中的fsolve函数,求出电流与柔性机械手手指张开大小的关系,为柔性机械手抓取特殊物体提供了理论依据。
[1] 陈雪云.数控机床机械手设计[J].科技传播,2014(3):104-105.
[2] 张立彬,杨庆华,胥芳,等.机器人多指灵巧手及其驱动系统研究的现状[J].农业工程学报.2004,20(3):271-275.
[3] 张立彬,杨庆华,鲍官军,等,一种气动柔性驱动器[P].中国专利:CN2790700,2006-06-28.
[4] Yang Qinghua,Zhang Libin,Bao Guanjun,et al,Research in NovelFlexible Pneumatic ActuatorFPA [C].IEEE Conferenceon Robotics,Automation and Mechatronics,2004:385-389.
[5] 杨庆华,张立彬,鲍官军,等.气动柔性弯曲关节的特性及其神经PID控制算法研究 [J].农业工程学报,2004,20(4):88-91.
[6] .J].农业工程学报,2010,26(1):140-144.
[7] 刘光元,章军,朱飞成,等.变载荷作用下柔性关节板弹簧的大变形分析与强度计算[J].机械科学与技术,2013,32(1):111-115.
[8] Zhi Liu,Bai Fenliu.Robust Control Strategy for the Speed Control of Brushless [J].Journal of Harbin Institute of Technology,2013,20(2):90-94.
[9] 夏长亮.无刷直流电机控制系统[M].北京:科技出版社,2009:31-37.
[10]王蕾,陆小龙,赵世平,等.电力铁塔攀爬机器人直线推杆机构设计与分析[J].机械设计与制造,2012(3):52-54.
[11]邓薇.MTALAB函数速查手册[M].北京:人民邮电出版社,2010:242-243.
猜你喜欢
辽宁省交通高等专科学校学报(2022年5期)2023-01-03 16:33:02
九江职业技术学院学报(2022年1期)2022-12-02 09:42:24
汽车实用技术(2022年9期)2022-05-20 05:51:22
民用飞机设计与研究(2019年2期)2019-08-05 01:33:44
北京汽车(2019年6期)2019-02-12 05:19:50
设备管理与维修(2018年15期)2018-11-08 06:14:50
汽车电器(2018年10期)2018-11-01 01:17:26
设备管理与维修(2018年8期)2018-08-13 12:09:14
中国核电(2017年1期)2017-05-17 06:10:00
中国音乐教育(2015年9期)2015-05-16 03:27:16
