
基于广义集合的可变功能机械功能耦合性分析*
2015-11-21 05:58:48余远文邓益民
机械制造 2015年2期
□ 余远文 □ 邓益民
1.宁波大学 机械工程与力学学院 浙江宁波 315211
2.浙江省零件轧制成形技术研究重点实验室 浙江宁波 315211
基于广义集合的可变功能机械功能耦合性分析*
□ 余远文1,2□ 邓益民1,2
1.宁波大学 机械工程与力学学院 浙江宁波 315211
2.浙江省零件轧制成形技术研究重点实验室 浙江宁波 315211
针对可变功能机械的功能耦合性分析及量化问题,从能量流、信号流和物料流的角度分析了系统各功能之间耦合性产生的原因。在此基础上,构建了系统行为结构的广义有向图模型,定义了各功能的广义集合,描述了广义集合的交集、并集运算法则。通过借鉴Jaccard相似性系数概念,给出了可变功能机械的功能耦合度表达式。以多功能榨汁机为例,说明了上述模型和方法的有效性。
可变功能机械 行为 广义集合 功能耦合度
可变功能机械系统,简称为可变功能机械,是指需要通过更换系统构件或调整构件连接方式来实现不同功能的机械系统。可变功能机械具有结构紧凑、适用范围广、使用方便等特点,其中最大的特点是拥有可变更的系统功能,并且这些功能可相互耦合。
有关功能耦合问题,目前的研究主要集中在通过讨论功能与设计参数之间的关联性来分析功能间的耦合关系,其目的在于解耦,以达到公理设计对功能独立的要求。张国军等[1]根据公理设计原理,对产品的功能和设计参数进行层次划分来分析功能耦合性;陈羽等[2]通过构建功能与参数的完全关联矩阵来分析异构模块组合的耦合问题。可变功能机械的功能耦合性是系统本身的一种属性,对它分析研究的目的不在于最后通过解耦方式来满足公理设计的要求,而在于了解耦合性产生的原因及对其度量的方法等,为可变功能机械的评估和创新设计提供理论依据和技术指导。
针对造成可变功能机械其功能间存在耦合关系的原因,其中一个直观的认知是由于各功能之间拥有共享构件。根据FBS(Function Behavior Structure)[3,4]模型框架,这种认知体现的是功能与结构的映射,所对应的方法是把结构作为功能的实际载体,通过共享构件集来描述功能耦合性。这种方法所表达的功能耦合性能够反映可变功能机械的结构紧凑性,可用于对现有可变功能机械结构进行评价,但是这种认知无法反映功能耦合性的深层次原因。从本质上讲,机械产品的功能[5]可以理解为是系统中能量流、信息流、物料流输入与输出的传递与转换过程的抽象化描述,结构无法表达能量、信息和物料元素的内容。而FBS模型中的行为[6]是功能与结构映射的中间层次,是产品实现预期功能所表现的一系列特征,具体表达的是能量流、信息流、物料流的传递和变换过程。可见,行为更能够反映功能的真正含义,把它作为可变功能机械的功能耦合性分析基础,能够反映各可变功能在能量、信息或者物料元素上的相同内容,从而更深层次了解功能耦合性关系发生的内在原因。本文用输入-输出流表达法[6]描述系统各功能的行为过程,在此基础上,通过广义集合理论[7]的相关知识,分析各功能间在能量、信号和物料元素上的相同内容,提出功能耦合性的量化方法。
1 可变功能机械的行为特性分析
可变功能机械是多功能机械的特例,与单个功能机械相比,在分析行为时,它有不止一个行为结构,每一个功能都对应一个完整的行为结构。但是对于一个系统而言,不同功能的行为分析方法是一样的,并且它们的行为结构是相似的。为了避免复杂化,笔者选择一个功能的行为过程例子来说明具体过程。
行为过程的表达是FBS理论模型中重要的组成部分,目前已经有很多学者对它进行了研究,其中Deng[6]在总结前人的基础上,概括出三类行为表达方法:输入-输出流表达法、物理状态变化表达法以及自然语言语句表达法。根据功能耦合性分析的需要,输入-输出流的表达法较为切合。输入-输出流实际上是一种语义表达(Semantic Representation),其相应的句法表达(Syntactical Representation)可以有多种形式,但大都以图论(Graph Theory)为基础。与此类似,本文以广义有向图为基础,构建可变功能机械的行为结构模型。第一,需要对能量流、信号流和物料流作进一步的定义,曹国忠等[8]和高飞等[9]都对这3个流作了进一步的细化,有相同的部分也有不同的地方,表1是根据功能耦合性分析需要对三种流作的归纳和总结。第二,根据广义有向图[9]的相关知识,在分析系统行为过程的基础上,构建系统的行为结构模型,图1为一个功能的行为结构广义有向图样例。
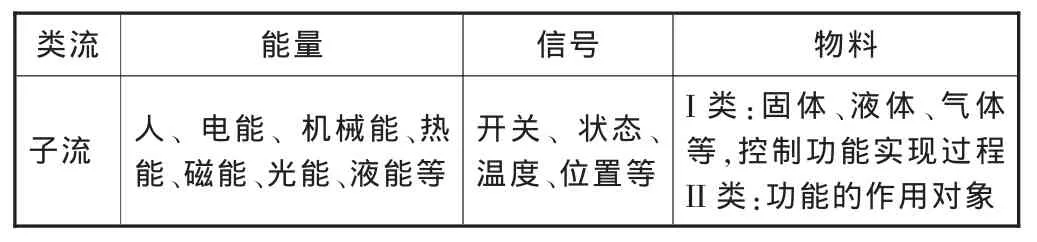
表1 流的基本类型

▲图1 行为结构广义有向图
在构建可变功能机械的行为结构模型时,需要注意的是有进有出准则,即任何一种类流经过行为元时,不会消失,出来的还是同一类流,只是所对应的子流类型可能发生变化。如e1经过B2(指机械系统工作时的工序,如电机转动,将电能转变成机械能)的作用,变成e2,e1和e2都是能量,但子流类型不一样。
2 广义集合
2.1 传统集合的不足
传统集合强调集合元素的互异性[7],即任意两个元素都是不同的对象,如{a,a,b}不能构成一个集合,应写成{a,b}。这种理论体系无法表达一个事物或者系统组成元素的数量关系,如H2O,按传统集合的表达,应该是{H,O},显然H元素的数量信息没有得到呈现。而针对可变功能机械的行为过程,不同子流元素出现的次数是不一样的,如果采用传统集合来表达各功能行为过程中能量、信号以及物料的内容,这种差异就得不到体现。那么在功能耦合性分析过程中,会出现被共享次数多的流元素与共享次数少的流元素处于同一等级,这会导致结果产生很大的偏差,一个简单的例子是A功能与B功能在某个子流元素上有10次相同,而C功能与B功能在这个子流元素上只有1次相同,显然A与B的耦合性要比B与C的耦合性大。广义集合[7]能够很好地解决这一问题,它不仅可以表达一个事物或者系统是由哪几个部分构成,而且还能够表达出各个系统组成部分的数量。
2.2 广义集合的基本概念
广义集合[7]是气象学家张学文多年对“熵、信息、复杂性”的研究下提出的概念。根据功能耦合性分析的需要,对广义集合概念的表达和计算作必要的描述。
假设可变功能机械拥有n种功能,系统所有的行为结构中能量子流有n1种类型,信号子流有n2种类型,物料子流有n3种类型。则第p个功能行为过程的能量流、信号流、物料流的广义集合可写成如下形式:

式中:apt、bpt,、cpt为个体数量,表示对应子流在该功能的行为结构中出现的次数;et、st、mt为标志值,表示三种类流,分别是能量、信号和物料。
第p个功能的行为结构所有流的广义集合可以表示为如下形式:

任意两个功能广义集合的交集∩为:
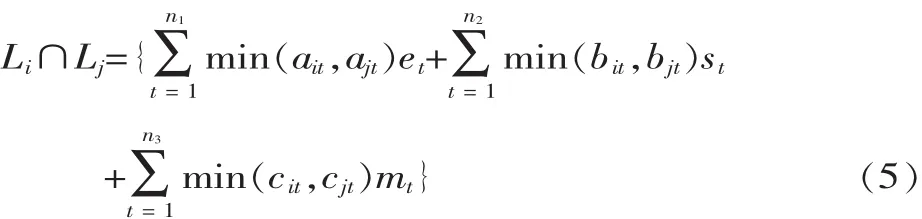
任意两个功能广义集合的并集∪为:

3 可变功能机械的功能耦合性分析
可变功能机械功能间的耦合关系产生的原因是它们之间在能量、信号以及物料上有相同内容,从流的广义集合上看,就是彼此间有交集,如图2所示。
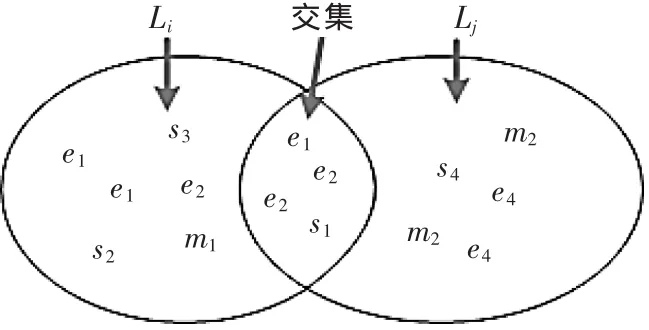
▲图2 广义集合间的交集
而集合的交集与集合相似性[10]有很大的关联,可以借鉴集合相似性的量化方法来定义功能耦合度。目前有很多关于集合相似性的量化方法,本文借鉴Jaccard相似性系数[11]的相关概念,可获得集合相似度Cij的表达式:
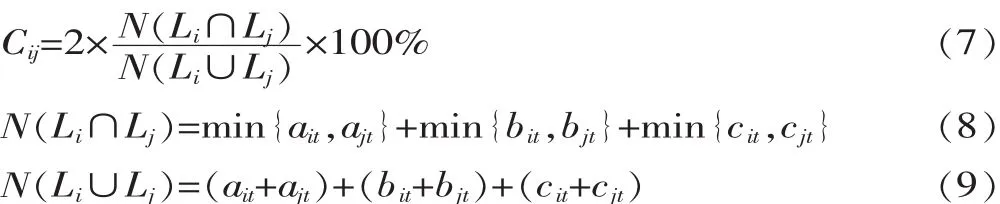
关于功能耦合度,有一个常识,就是一个功能和自己本身一定是100%耦合的。但是根据广义集合理论中关于交集和并集的定义,显然,而不是传统集合论下的1,如果直接采用Jaccard相似性系数来定义功能耦合度,则最大值也只能是50%。为了与常识一致,式(7)添加了系数2。
4 实例分析
本节以多功能榨汁机(如图3所示)为例,说明上述方法的具体过程,并验证方法的有效性。

▲图3 多功能榨汁机
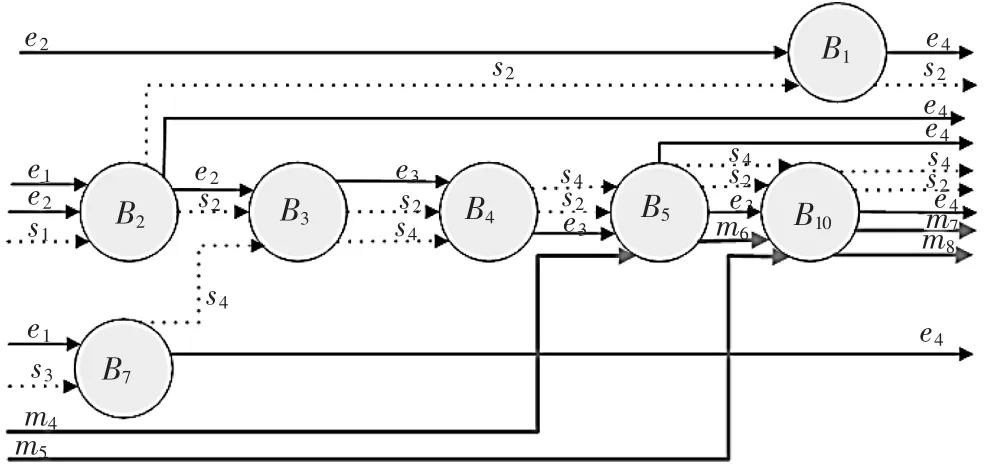
多功能榨汁机包括榨汁(F1)、搅拌 (F2)、干磨(F3)、 绞肉(F4)4种功能。图4~图7分别是各功能对应的行为结构广义有向图。各功能的行为结构广义有向图中的标识含义见表2至表5。根据以上内容,可以得到各功能的广义集合:
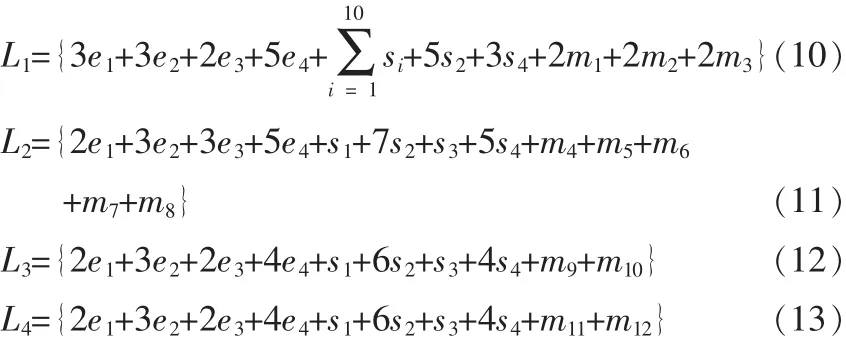

▲图4 榨汁功能的行为结构广义有向图
根据式(8)、式(10)~(13),可以计算出任意两个功能广义集合交集的总元素个数,见表6。同理可得任意两个功能广义集合并集的总元素个数,见表7。根据等式(7)和表6、表7,可以计算出任意两个功能的耦合度,见表8。
▲图5 搅拌功能的行为结构广义有向图
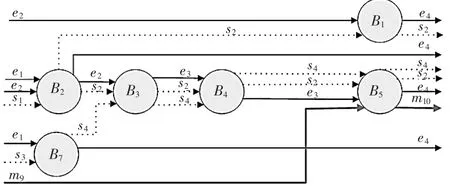
▲图6 干磨功能的行为结构广义有向图
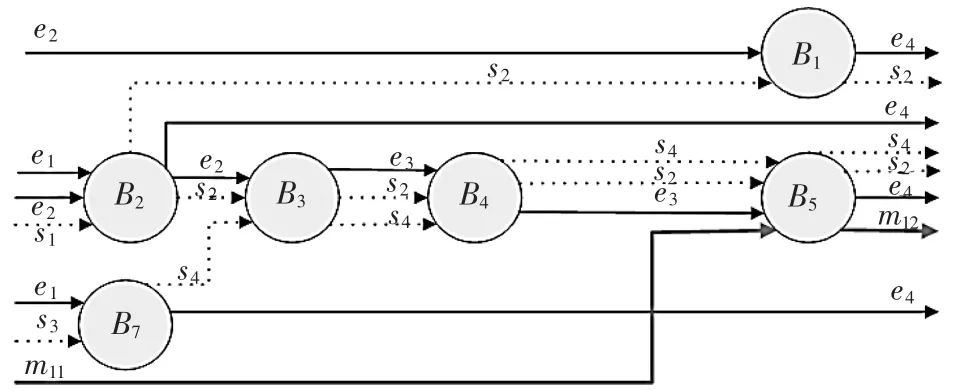
▲图7 绞肉功能的行为结构广义有向图

表2 各行为元含义

表3 各能量子流含义

表4 各信号子流含义

表5 物料子流含义
5 结束语
通过广义有向图来表达可变功能机械的行为结构中能量流、信号流以及物料流的情况,得到功能耦合性是由各可变功能之间拥有相同的子流元素引起的这一结论。根据广义集合论的相关知识,给出可变功能耦合度表达式,便于比较系统各功能之间耦合性大小,有别于传统的从结构角度来考虑功能耦合性。它虽然无法直接反映出系统结构的紧凑性,但有助于深层次了解功能耦合性产生的原因,为下一步分析为什么多个功能能够聚合在一个可变功能机械系统上提供基础,从而为以可变功能为目标的创新设计提供指导。

表6 广义集合交集总元素个数

表7 广义集合并集总元素个数

表8 功能耦合度
[1]张国军,王翠雨,程强,等.面向可适应设计的耦合功能集割裂规划[J].华中科技大学学报(自然科学版),2008,36(6):1-3.
[2]陈羽,滕弘飞.异构模块组合耦合分析的完全关联矩阵[J].机械工程学报,2012,48(11):22-28.
[3]Gero J S,Kannengiesser U.The Situated Function-behaviorstructure Framework[J].Design Studies,2004,25(4):373-391.
[4]Umeda Y,Ishii M,Yoshioka M,et al.Supporting Conceptual Design Based on the Function-behavior-state Modeler[J]. Artificial Intelligence for Engineering Design,Analysis and Manufacturing,1996,10(5):275-288.
[5]赵有珍,李健,邓家褆.产品功能结构建模研究[J].计算机应用研究,2003(11):32-38.
[6]DengY M.Function and Behavior Representation in Conceptual Mechanical Design[J].Artificial Intelligence for Engineering Design,Analysis and Manufacturing,2002,16(5):343-362.
[7]张学文.组成论[M].合肥:中国科学技术大学出版社,2003.
[8]曹国忠,檀润华,孙建广.基于扩展效应模型的功能设计过程及实现[J].机械工程学报,2009,45(7):157-167.
[9]高飞,潘双夏,冯培恩.基于广义有向图的产品功能建模方法研究[J].浙江大学学报(工学版),2005,39(5):648-651.
[10]林学民,王炜.集合和字符串的相似度查询 [J].计算机学报,2011,34(10):1853-1862.
[11]潘磊,雷钰丽,王崇骏,等.基于权重的Jaccard相似度度量的实体识别方法 [J].北京交通大学学报,2009,33(6):141-145.
(编辑 禾 禾)
TH122
A
1000-4998(2015)02-0077-04
*国家自然科学基金资助项目(编号:51375246)
2014年9月
猜你喜欢
干旱气象(2022年5期)2022-11-16 04:40:24
数学物理学报(2022年3期)2022-05-25 13:33:00
防爆电机(2022年1期)2022-02-16 01:13:58
云南民族大学学报(自然科学版)(2021年3期)2021-06-24 09:07:06
生产力研究(2020年5期)2020-06-10 12:01:36
中国中医急症(2019年10期)2019-05-21 07:20:28
四川师范大学学报(自然科学版)(2018年4期)2018-07-04 11:53:22
廊坊师范学院学报(自然科学版)(2017年3期)2017-10-11 02:14:06
数学年刊A辑(中文版)(2016年2期)2016-10-30 01:46:38
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27
