
机械系统接口功能元模型及其概念设计应用*
2015-11-21 05:58:47贺华波邓益民
机械制造 2015年2期
□ 赵 琳 □ 贺华波 □ 邓益民
宁波大学 机械工程与力学学院 浙江宁波 315211
机械系统接口功能元模型及其概念设计应用*
□ 赵 琳 □ 贺华波 □ 邓益民
宁波大学 机械工程与力学学院 浙江宁波 315211
为了研究接口在机械系统中的组成及其表达形式,提出了接口功能元的概念,列举了接口功能元的九种类别,包括连接、分离、放大、缩小、轴线转换、运动方式转换等,分析了功能转换的几种情况,建立机械系统接口模型。提出一种将接口功能元模型与“功能-行为-结构(FBS)”设计过程模型相结合的方法,构建设计过程框架,用以指导概念设计。最后以一种自动清洁设备的接口功能元模型的概念设计应用,验证了方法的实用性。
机械 概念设计 接口 功能
机械系统从广义上可以定义为由各个机械基本要素组成,可以根据需要完成一定功能,实现机械能变化、代替人类劳动的系统[1]。机械系统概念设计的内涵随着人们对概念设计的研究而更加广泛和深刻,概念设计的前期工作体现了设计人员对任务的理解和设计灵感的表达,后期工作主要是对功能结构及运动方案的构思设计。概念设计是方案创新的一个设计过程,也是机械设计中最具有创造性的环节。
接口的概念首先于计算机硬件设计中提出,主要应用在电子、软件等领域,在机械方面对于接口的研究目前多集中在模块化设计中,主要为产品的标准化和系列化设计提供支持。比如:蔡远文[2]总结了模块接口标准化设计的优势,提出了利用QFD和TRIZI理论对接口进行标准化设计的观点,用以指导航天器的模块接口设计;蔡银才等[3]也对机械设计接口的通用性进行了研究,提出了分体式螺栓的方案,解决机架接口通用化设计问题,并应用于飞机的发射装置中;朱元勋等[4]面向模块接口的系列化进行了设计,对装载机模块接口的数据结构进行了分析和应用;钟诗胜[5]在产品模块系统结构建模中,结合面向对象技术,提出了基模块接口关系扩展布尔矩阵逆向求解策略,在翼导弹模块系统中进行了应用。可以看出机械系统接口的研究多集中在模块设计中作为其中一个环节提出,有关机械系统接口概念设计理论及应用的研究还不够全面。针对概念设计接口的研究现状,本文通过对接口功能元的定义,阐述了接口在概念设计中的内容,并通过构建概念设计框架进一步对接口功能元模型的具体应用进行了研究。
1 接口
接口可分为广义接口和传统接口。传统接口主要包括具有信息传输作用的数据接口和具有固定作用的装置,如螺栓、螺母、定位销等;广义接口是指在系统内部起到连接作用的硬件和软件的总称。传统的接口分类主要包括硬件接口和软件接口两大类,软件提供系统信息交互、转换、调整的方法和过程,重点在于设计中的接口标准[6]等。硬件接口主要指除软件接口外需要通过一定手段实施的含有一定物理结构的能量传递装置。硬件接口根据传递的能量有无介质分为无介质类和有介质类,当机械结构通过物理连接来实现能量传递时,称为无介质的硬件接口,如图1所示,机电系统、液压系统和气压系统等需要一定介质来传递功能行为的属于有介质的情况。
不同系统对接口的需求各有不同,例如机电一体化系统将机械、电子和信息系统进行有机的组合,融合功能各异的技术为一体,这就需要软件接口和硬件接口相配合,并且通过控制系统进行调节,一个好的机电一体化系统的设计离不开合理的、可靠的接口设计。接口作为非常关键的环节,在机电一体化系统的设计研究中非常紧迫和必要[7],接口设计在概念设计中的理论研究,也需要加强与实际相结合的实践。
2 机械系统接口模型
2.1 接口功能元
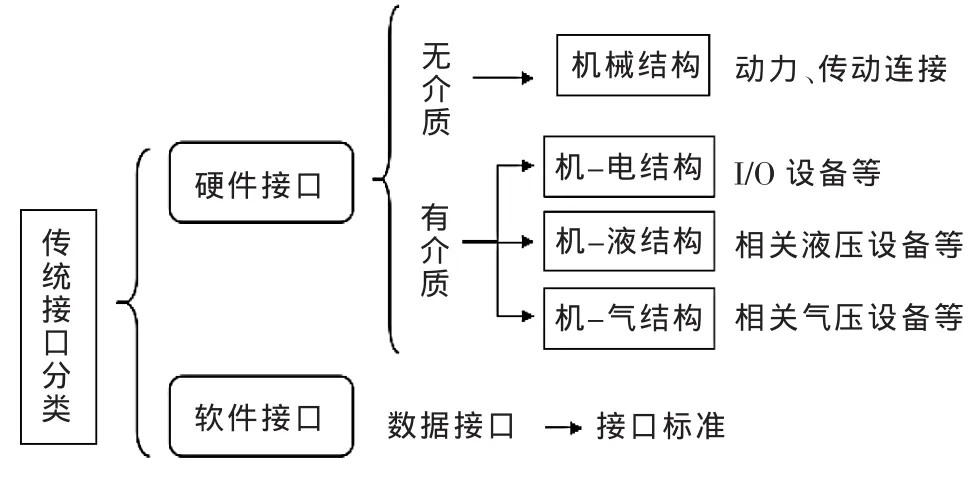
▲图1 传统接口的分类
机械系统接口可划分为不同层次,如图2所示,机械系统接口不仅仅指构件的连接,也包括由某些机构或者系统组成的具有一定转化功能的结构。例如系统间的连接部分,即机构与机构间的连接结构,由若干运动副按照一定的连接顺序组成,完成机构功能的转换,如减速器输入与输出间的齿轮传动机构也可看作为接口。某个机构或几个机构组成部分如果起到了功能连接的作用,就可以称为接口。为便于对接口的组成及表达方法的研究,将机械系统中具有实现功能转换目的的结构单元定义为接口功能元,接口功能元作为一个整体,具有一定的属性和功能。
用图形的方式阐述接口功能元的概念。首先,用菱形图元代表接口功能元,如图3所示,菱形的两个长轴顶点可作为输入端和输出端的连接点,连接点可为固定连接方式也可以是可变的连接,用顶点上符号×的有无来表示固定或者可变。如果采用固定连接,则功能的转换关系不可更改,输入和输出连接为更高级别的系统;若采用可变的连接,接口功能元可以更换,从而实现不同的接口功能,产生不同的设计效果。短轴的两个顶点用来表示功能元内部信息和外界环境的作用。接口功能元的种类以菱形图框内的功能转换符号Ω表示,将Ω的种类分为9种并分别用9种图形表示,接口功能元的功能及代号见表1。
接口功能元的功能转换情况分析如下。
(1)脱离功能i_01。接口的脱离功能是接口基本的功能之一,表现为若输入端与输出端处于互不接触的位置,即接口空置时表现为脱离功能。
(2)连接功能i_02。与脱离功能相对应,连接功能也是接口的基本功能,即输入端与输出端处于稳定的接触位置,使输入、输出端相互连接的功能。
(3)分解功能i_03。接口的分解功能表现在由单一输入转变为多个输出,即通过接口的转换功能将输入端的功能传递给多个输出端。
(4)合成功能i_04。同样与分解功能相对应,合成功能指多输入转变为单一输出,通过接口转换将多个功能合成为一个输出功能。
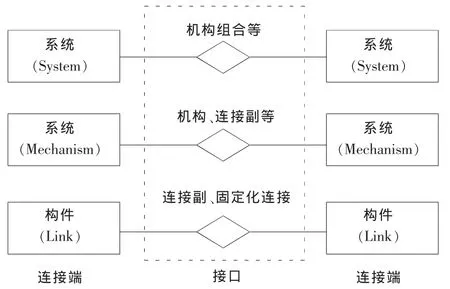
▲图2 接口层次模型

▲图3 接口功能元图形属性
(5)缩小功能i_05。接口缩小功能指对输入端的位移、速度等运动量进行缩小转换为相同性质的输出的功能。
(6)放大功能i_06。与缩小功能相对应,对输入端位移、速度等运动量进行放大的功能。
(7)转换轴线功能i_07。将输入端运动轴线进行改变的转换功能。
(8)改变运动方向i_08。将输入端与输出端的运动方向进行转换的功能。
(9)转换运动形式i_09。将输入、输出端的运动形式进行转换,如旋转与直线运动间的转换、连续运动与间歇运动转换等。
2.2 接口功能元模型内部信息
接口功能元的信息不仅包括接口的转换作用类型,也包含接口的行为方式,所处的连接层信息以及接口运动副带来的自由度的变化等。需要注意的是,接口不一定导致自由度增加,也可能造成自由度减少为零,形成固定部件的情况。表2列举了接口信息的种类及具体内容。
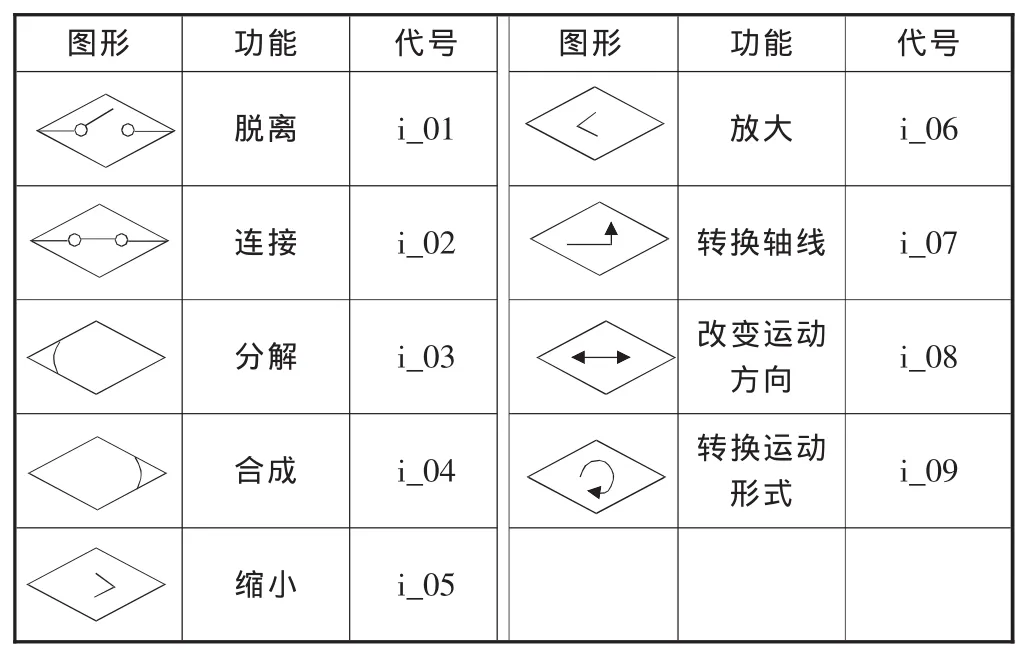
表1 接口功能元的功能及代号
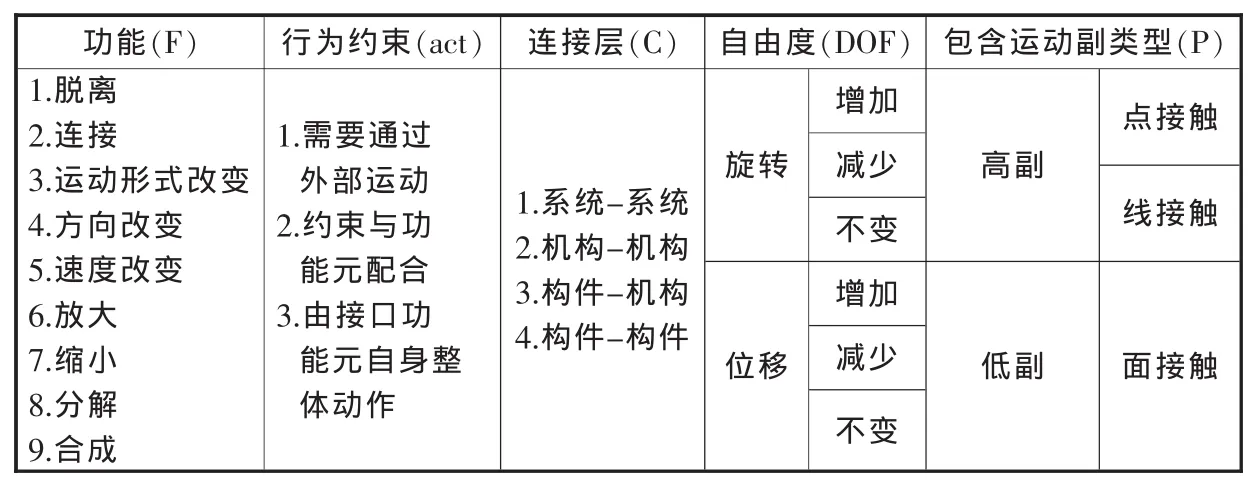
表2 接口功能元信息表
3 机械系统接口概念设计模型
3.1 设计过程模型
基于对接口的研究,本文提出一种将接口功能元模型与功能-行为-结构(Function Behavior Structure,FBS)模型[8]相结合的概念设计框架,如图4所示。根据接口在设计中的特殊作用,对接口的功能和结构信息分析之后进行建模。一般对某个系统或者产品进行设计时,总是遵循一定的顺序,FBS模型就是一种自顶向下的设计过程模型。
功能表达了设计的目的,比如要实现夹持棒料并旋转方向放置到指定地点这一功能,就分为夹持、旋转、位移等子功能,为实现这一功能,系统需要有功能脱离、接合、错位接合、功能放大缩小等转换作用的接口。行为用来表示设计者推断出结构的方法,接口行为主要有:分解、合成前级行为,转换运动形式,实现前后级行为之间量的变化,如转速、力等。结构蕴含了该设计由哪些元件组成、这些元件的属性如何以及元件之间的关系。功能到行为的映射是功能在行为层的求解,行为层到结构层的映射,确定了进一步细化实施具体行为所需要的机构和运动形式。
3.2 实施步骤
第一步:划定输入端和输出端,确定接口位置。这一步取决于接口的连接层次,若输入端为传动机构,输出端为执行机构,则接口划定为机构-机构连接层,以此类推。
第二步:确定输入端和输出端的物质、能量和信息属性,进行分析得出功能的转换关系。
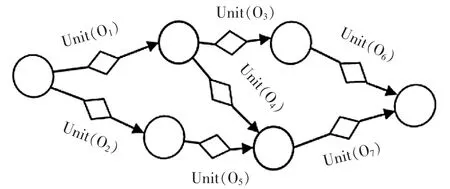
用图论方法将转换关系进行直观表达,如图5所示建立概念设计功能转换图,用图圆表示某个包含一定物质、能量和信息的端口,圆之间带有箭头的直线表示机械系统设计过程中物质流、能量流和信息流的流向,接口功能元处于连线的中间对端口进行转换。
第三步:通过输入端和输出端的转换关系,确定接口的具体功能,分析构建接口功能元模型,得出模型的结构信息和功能信息,对接口知识进行管理。
采用功能转换图进行分析,有两点说明:①以菱形图框和功能转换符号表示接口功能,上节2.1已对接口功能元种类作了详细描述,以表示接口的具体转换作用;②用Unit(Oi)对接口进行编码,建立接口信息表,对设计信息进行实时管理。
第四步:将接口功能元进行功能分解,再经过功能向行为的映射、行为到结构的映射,对概念设计模型进行求解。

▲图4 机械系统接口概念设计模型
▲图5 概念设计功能转换图
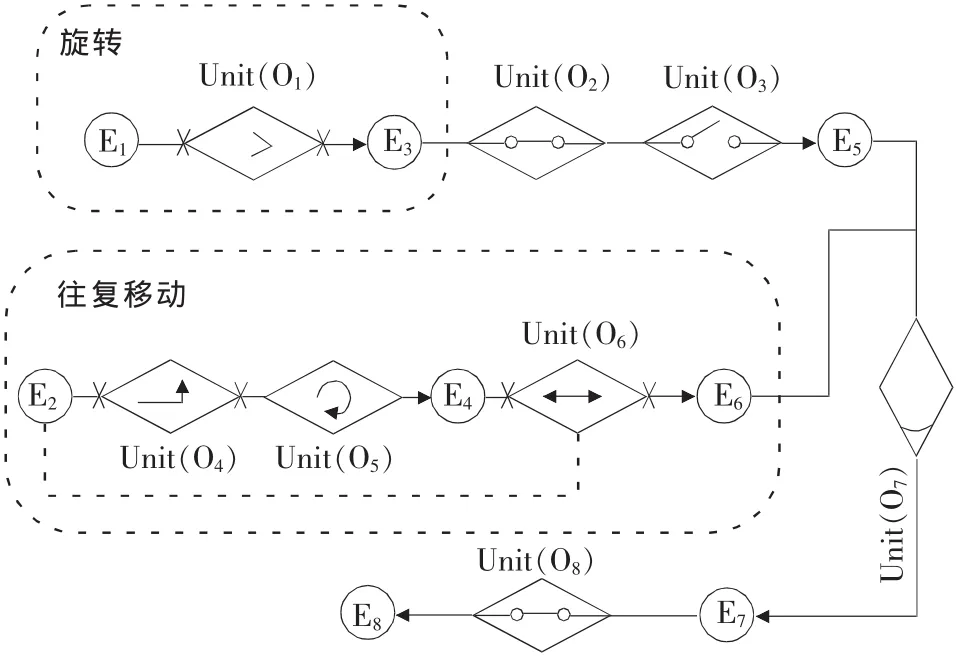
▲图6 清洁设备的概念设计功能结构图
4 应用实例
以一种自动清洁设备为例,说明基于接口功能元分析的概念设计应用。此种清洁设备主要用于对管道类等需要深入内部进行清洗工作的场合,本例研究的工作对象为直径10 cm、长520 cm的细长型管道,需要靠安装在设备表面的清洁刷毛清洗管道内壁。
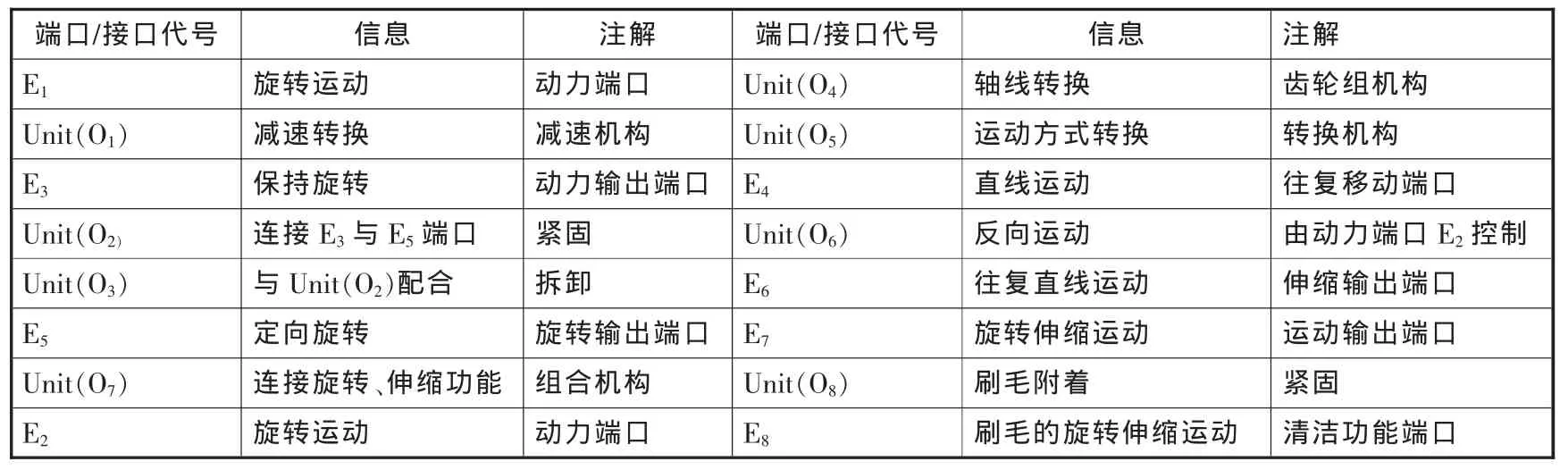
表3 图6中符号说明
对管道的清洁一般通过刷子或者清洁剂与内壁的相对运动来完成,当施加一定力时,相对运动起到了刮擦污垢并使污垢脱离的功能,主要是将刷毛旋转运动和往复运动进行组合。动力输入由伺服电机提供,设定输入端为动力机构,输出端为执行机构,建立接口概念设计功能转换图,如图6所示,端口用E表示,代表一定的物质、能量、信息,对各接口的转换关系进行分析。
图6中各符号在表3中作了说明,E1端口提供旋转运动所需动力,E2端口提供往复运动所需动力,旋转运动经Unit(O1)接口减速后经E3端口输出,Unit(O4)接口将动力端口E2提供的旋转动力经轴线转换为垂直轴的旋转,再通过Unit(O5)接口转换为直线运动,往复运动接口的控制由电机的正反转间接完成。E5和E6端口的输出经接口Unit(O7)合成,将旋转和伸缩功能组合为一体,最后经过刷毛的作用完成清洁功能。
图7为根据对功能的分解和运动流程的分析,得出的解决方案,机械系统由两部分构成:旋转部分和往复移动部分。由两个电机提供电力并进行控制,伸缩电机传递给伸缩机构动力,控制其伸长和缩短,旋转电机给齿轮机构动力,控制旋转。旋转电机带动小齿轮转动,大齿轮与小齿轮相啮合,带动大齿轮上固定焊接的伸缩部分旋转,完成旋转功能。固定在大齿轮上的伸缩电机带动锥齿轮组和丝杠轴啮合传动,两边对称的丝杠反向旋转,螺母与丝杠配合在轴上左右移动,位于螺母上的铰链与连杆相连,随着两边的铰链距离增加,剪刀叉机构收缩,反之,电机反向转动,两边铰链的距离减少机构伸长,完成伸缩动作。两个部分配合可以进行旋转和伸缩,达到对不同方位进行深度清洁的作用。
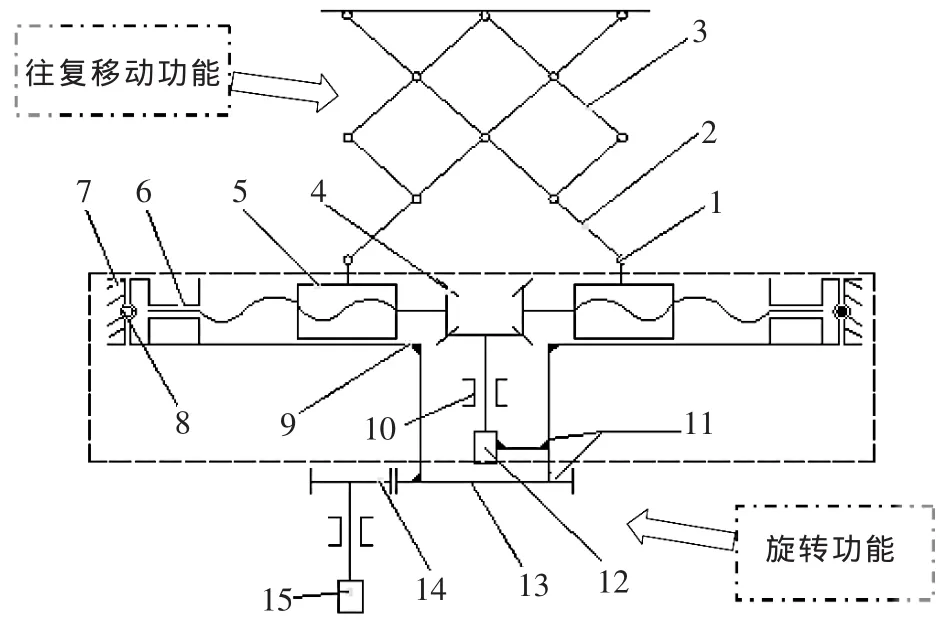
▲图7 方案原理图
5 结束语
从概念设计角度建立了机械系统接口的功能元模型,给出了具体表达方法,提供了一种解决机械系统中接口概念设计相关问题的方法。结合不同设计阶段,研究了接口信息,包括接口所在的设计层、连接端口的自由度及连接副种类等。为寻求机械系统接口设计映射求解的方案,将FBS设计模型与接口功能元模型相结合,构建了概念设计框架,利用接口功能结构图来辅助设计,明确了设计流的流向和接口在设计中的功能转换关系,通过设计实例,说明了该方法的可行性。
[1]邹慧君,颜鸿森.机械创新设计理论与方法[M].北京:高等教育出版社,2008.
[2]蔡远文,解维奇,郭会,等.面向在轨服务航天器模块接口标准化设计[J].兵工自动化,2009(12):22-24.
[3]蔡银才,张堃.发射装置与飞机机械接口的通用化设计与应用[J].黑龙江科技信息,2013(20):110-111.
[4]朱元勋,周德俭,谌炎辉.面向模块化库的装载机模块接口的系列化设计[J].机械设计与制造,2012(5):255-257.
[5]钟诗胜,李江,刘金,等.面向模块化设计的产品模块系统结构建模[J].中国制造业信息化(学术版),2004(5):91-94.
[6]郝永平,苏向东,张建富,等.制造业信息集成接口技术研究[J].现代制造工程,2005(8):35-38.
[7]郑刚,张慧慧,费仁元.机电接口技术的内涵和发展[J].北京工业大学学报,2013(4):414-417.
[8]Gero J S,Kannengiesser U.The Situated Functionbehaviorstructure Frameworks[J].Design Studies,2004,25(4):373-391.
(编辑 小 前)
TH122
A
1000-4998(2015)02-0073-04
*国家自然科学基金资助项目(编号:51375246)
2014年8月
猜你喜欢
建材发展导向(2022年20期)2022-11-03 01:07:04
建材发展导向(2021年7期)2021-07-16 07:08:06
科学家(2021年24期)2021-04-25 13:25:34
文艺生活(艺术中国)(2018年11期)2019-01-03 08:42:18
网络安全和信息化(2017年6期)2017-11-23 08:36:18
浙江大学学报(工学版)(2016年2期)2016-06-05 09:20:51
现代工业经济和信息化(2016年5期)2016-05-17 05:35:56
工业设计(2016年11期)2016-04-16 02:44:16
电脑迷(2015年6期)2015-05-30 08:52:42
职业·中旬(2015年4期)2015-05-30 05:54:49
