基于模糊控制策略的车辆主动悬架研究*
2015-05-24 03:45:04唐传茵马岩赵广耀李允公张洪铁
动力学与控制学报 2015年3期
唐传茵 马岩 赵广耀 李允公 张洪铁
(1.东北大学机械工程与自动化学院,沈阳 110819)(2.沈阳仪表科学研究院,沈阳 110043)
引言
车辆悬架的功用为承载车身与车轮之间的力,完成车轮与车身之间的力与力矩的传递作用,缓和来自路面传递给车身的冲击载荷,衰减冲击载荷引起的振动,保证车辆能够正常行驶.车辆悬架系统在很大程度上决定着整车的行驶平顺性、操纵稳定性与通过性,对减振效果等多项使用性能都有着很大影响.车辆平顺性与操纵稳定性的矛盾问题是车辆动力学一直存在的问题,悬架电控技术为解决这个问题找到了办法.关于悬架电控系统控制规律的研究受到学者的广泛关注.很多研究者进行了关于悬架模糊控制器设计与主动,半主动悬架系统的仿真分析[1,2,6].本文提出了针对整车系统模型的新的模糊控制方法,方法一,设计了一种模糊控制器,整车模型采用一种控制算法.在第二种控制方法中,分别设计针对垂向振动的模糊算法控制器,针对俯仰运动的模糊算法控制器,与针对车体侧倾时运动的模糊控制器;侧倾与俯仰时的运动状态与垂直运动不同,经过反复试验与仿真分析,提出了针对本文仿真模型的侧倾运动与俯仰的模糊规则.最后根据整车的运动情况,对三种控制器进行逻辑运算,得到逻辑运算控制器,应用仿真软件进行七自由度整车系统建模.结合仿真得到的结果对本文所建立的针对整车模型的模糊控制器进行分析与研究.
1 七自由度整车模型
七自由度整车系统模型[3]如图1所示.系统微分方程:
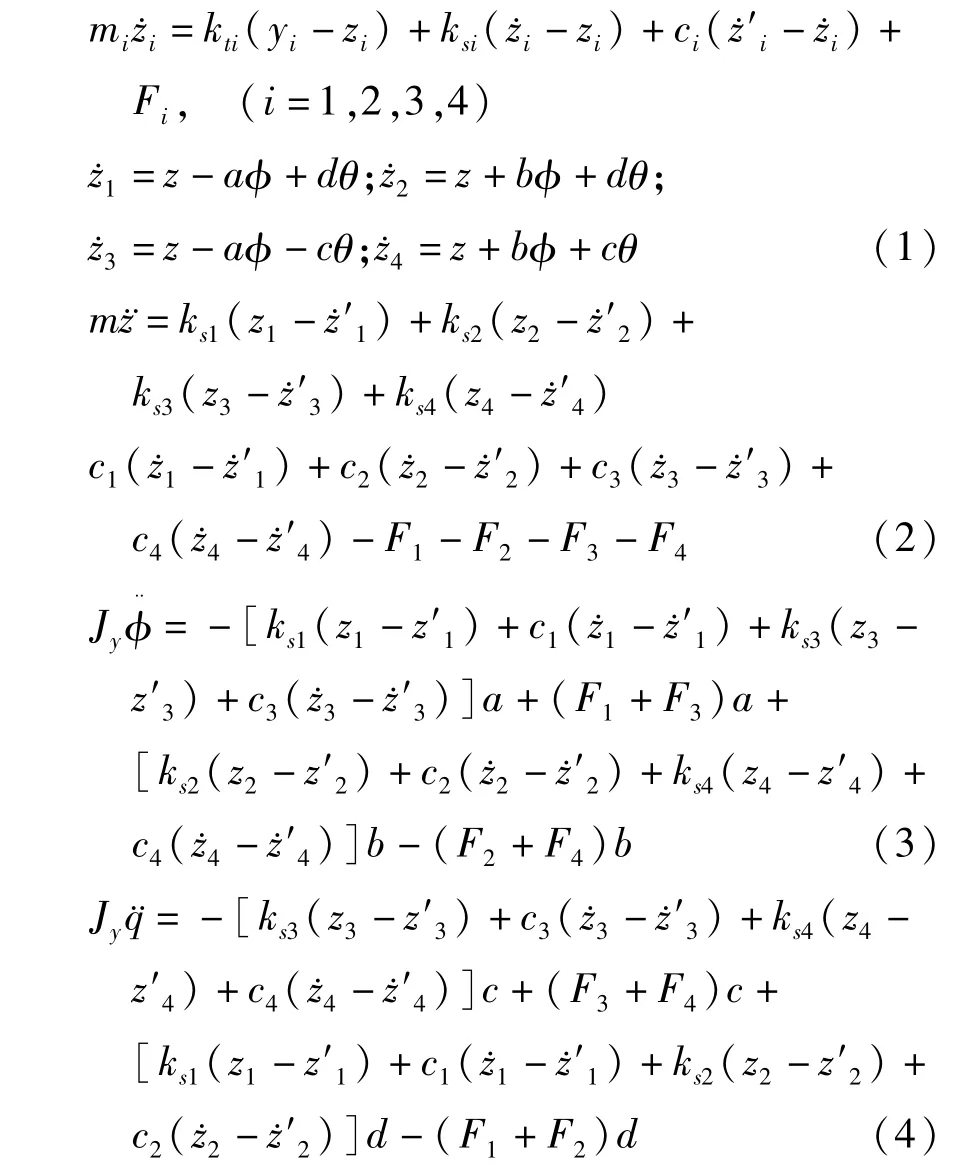
其中:a-车身质心到前轮(1、3)轴线的距离;b-车身质心到后轮(2、4)轴线的距离;c-车身质心到右轮(3、4)轴线的距离;d-车身质心到左轮(1、2)轴线的距离;jx-车身对于x轴的转动惯量;jy-车身对于 y轴的转动惯量;zi(i=1,2,3,4)-非簧载质量的垂向位移;z′i(i=1,2,3,4)-车身四个端点处的垂向位移;yi(i=1,2,3,4)-路面激励.

图1 7自由度整车系统模型Fig.1 The seven degrees of freedom model of vehicle
2 模糊控制系统建立
尝试两种模糊控制方法[4,5].针对不同的控制对象,采用不同的控制变量,对整车七自由度模型进行控制,两种控制方法的模糊控制规则不同,由仿真结果,对比两种控制方法对本文的整车模型的有效性.
2.1 方法一
选取悬架动行程的变化与变化率作为模糊控制器的输入变量,输出变量为控制力,模糊规则如表1所示.
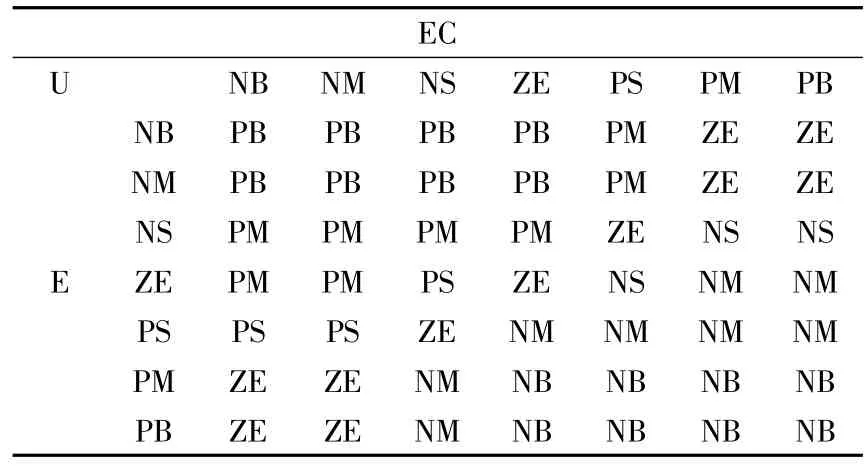
表1 模糊规则表Table 1 Rule for Fuzzy Logic
2.2 方法二
方法二所建立的模糊控制系统,包括垂直振动的模糊算法控制器,俯仰振动的模糊算法控制器,控制侧倾运动的模糊算法控制器,与逻辑运算控制器.控制系统的结构框图如图2所示.在垂直振动控制器中,车身的速度和车身的加速度作为输入变量,经过垂向控制器运算后,得到第一个中间输出变量;在俯仰振动控制器中,把车身俯仰的角速度与车身俯仰的角加速度作为输入变量,经过抗点头控制器运算后,得到第二个中间输出变量;在侧倾振动控制器中,车身侧倾的角速度与车身侧倾的角加速度设计为输入变量,经过抗侧倾控制器运算后,得到第三个中间输出变量;逻辑运算控制器,以三个中间输出变量作为输入变量,经过数学运算与逻辑运算后,得到四个输出控制力.

图2 控制系统结构图Fig.2 The structure diagram of the control system
2.2.1 垂向运动的模糊控制器
在设计的垂向运动的模糊控制器中,车身速度与车身加速度作为输入变量,第一个中间变量作为输出变量.在模糊系统的设计中,根据仿真得到的车身加速度范围,车身速度的模糊论域定为[-2.5 2.5],车身加速度模糊论域定为[-2.5 2.5].对车身速度定义 7个模糊集合,NB,NM,NS,ZE,PS,PM,PB.车身加速度定义7个模糊集合:NB,NM,NS,ZE,PS,PM,PB;对中间变量定义 7个模糊集合:NB,NM,NS,ZE,PS,PM,PB.输入输出变量的隶属函数经过反复尝试后选择gauss2mf函数.垂直运动的模糊规则如表2所示.
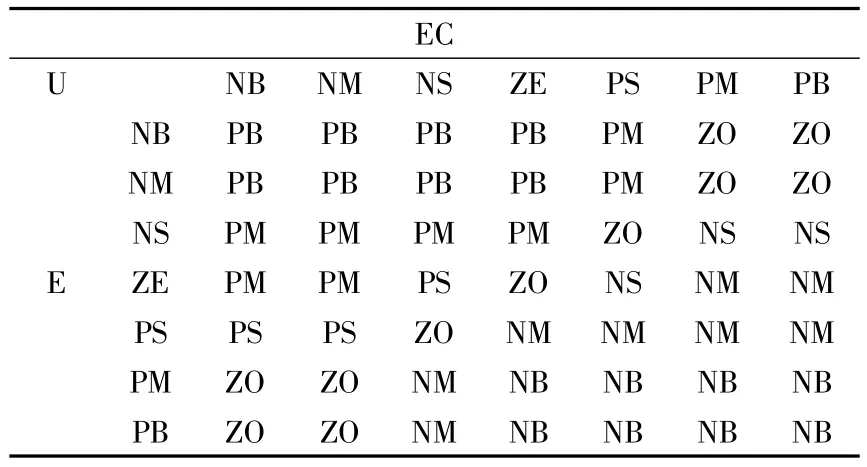
表2 垂直模糊控制规则Table 2 The rule for vertical fuzzy control system
2.2.2 俯仰运动的模糊控制器与侧倾运动的模糊控制器
在针对俯仰运动的模糊控制器设计中,以车身的俯仰角速度与俯仰角加速度这两个变量作为为输入量,第二个中间变量作为输出变量.俯仰角速度的模糊论域定义为[-2.5 2.5],俯仰角加速度模糊论域定为[-2.5 2.5].对俯仰角速度定义7个模糊集合,NB,NM,NS,ZE,PS,PM,PB.俯仰角加速度定义7个模糊集合:NB,NM,NS,ZE,PS,PM,PB;对中间变量定义7个模糊集合:NB,NM,NS,ZE,PS,PM,PB.输入输出变量的隶属函数经过反复尝试后选择gauss2mf函数.俯仰时,设车身左右对称,P1=P3,P2=P4.经过反复试验,得到俯仰运动的模糊规则.针对侧倾运动的控制器的设计依照同样原理,把车身的俯仰角速度与车身的俯仰角加速度这两个变量作为输入量,第三个中间变量作为输出变量.侧倾角速度的模糊论域定义为[-3 3],侧倾角加速度的基本论域为[-3 3].对侧倾角速度定义7个模糊集合,NB,NM,NS,ZE,PS,PM,PB侧倾角加速度定义7个模糊集合:NB,NM,NS,ZE,PS,PM,PB;对中间变量定义 7个模糊集合:NB,NM,NS,ZE,PS,PM,PB.输入输出变量的隶属函数经过反复尝试后选择gauss2m f函数.侧倾时,设车身前后对称,P1=P2,P3=P4,侧倾时的运动状态与俯仰运动,垂直运动都不同,经过反复试验,设计侧倾运动的模糊规则,如下表3所示.
2.2.3 逻辑运算控制器
在逻辑运算控制器的设计中,取模糊控制器的三个中间输出变量,作为逻辑运算控制器的输入变量,逻辑运算控制器的输出变量为系统的控制力.参数a表示前轴到质心的距离、参数b表示后轴到质心的距离.参数c表示车辆左侧车轮质量到车轴质心的距离、参数d表示车辆右车轮质量到车轴质心的距离.

图3 合成后系统的受力简图Fig.3 The sketch of the composed system
将汽车车身的整体振动看作是车身在垂向方向的平动运动,与绕车身质心的旋转运动的合成运动[6],这样合成后系统的受力如图3所示.
经过逻辑控制器运算后的输出为

3 仿真分析
进行仿真分析,路面条件为B级路面,车速为30m/h.第一种控制策略控制后的结果如图4至图6所示,分别表示控制前后的车身垂向加速度响应,车身俯仰角加速度响应,车身侧倾角加速度响应.第二种控制策略,控制后的结果如图7至图9所示.两种控制策略的对比在表4中表示.由仿真结果可以看出,采用本文的模糊控制后,整车的车身垂向加速度响应,车身俯仰角加速度响应,与车身侧倾角加速度响应都得到比较好的衰减,而且轮胎动变形响应也得到了降低,悬架动行程效果不是很明显,但是也有一定程度的效果.
针对本文的七自由度整车悬架模型,分别建立针对垂向运动的模糊控制器、针对点头运动的模糊控制器、针对横向运动的模糊控制器,与逻辑运算控制器,车体不同的运动方式采用不同的控制规则,而且经过力学的合成,可以较好的改善系统的舒适性与操稳性.分别建立不同运动的模糊控制器,比单一采用同一种模糊控制器的控制效果要好,系统的舒适性与操纵稳定性都有一定程度的改善.
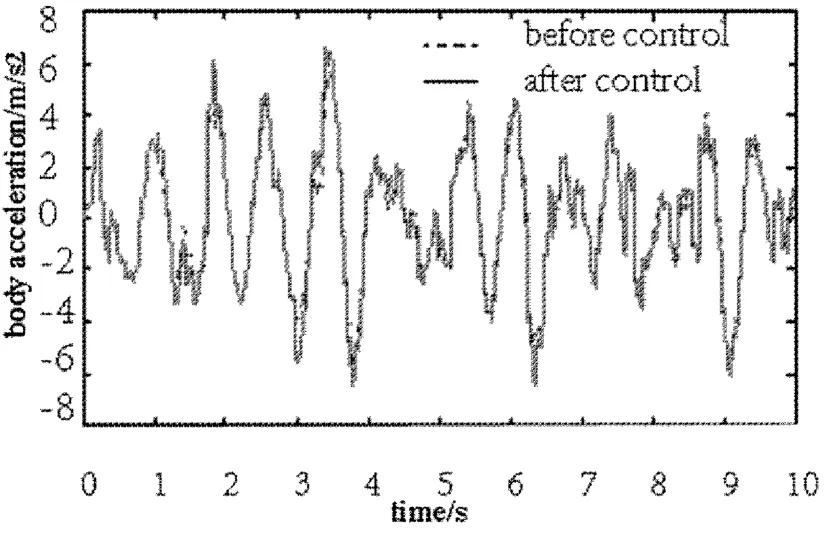
图4 车身加速度响应Fig.4 The response of vehicle acceleration

图6 车身侧倾角加速度响应Fig.6 The response of vehicle roll acceleration

图7 车身垂向加速度Fig.7 The response of vehicle vertical acceleration

图8 车身俯仰角加速度响应Fig.8 The response of vehicle pitch acceleration
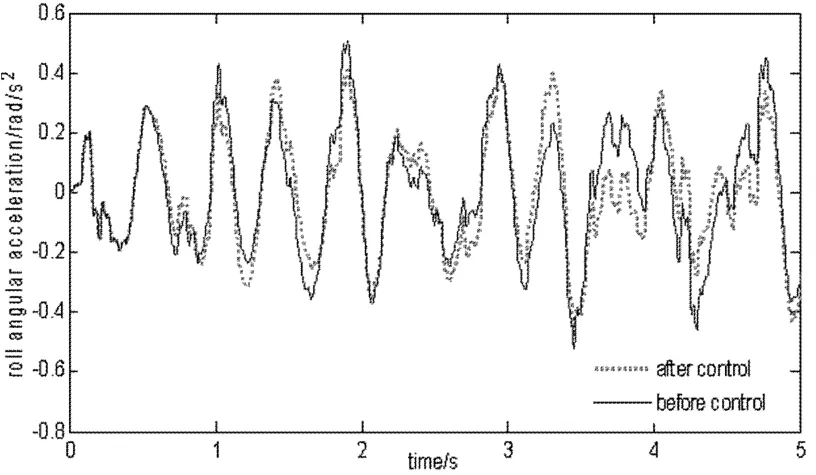
图9 车身侧倾角加速度响应Fig.9 The response of vehicle roll acceleration
两种控制方法的对比如表4所示.

表4 控制方法的对比Table 4 The comparison of the controlled method
4 结论
本文的第一种模糊控制器,整车模型采用一种控制策略,控制后车身垂直加速度改善9.3%,悬架动行程未变,轮胎动变形改善5.3%.第二种方法,分别设计垂直振动模糊控制器,俯仰振动模糊控制器,侧倾振动模糊控制器和逻辑控制器后,控制效果比第一种方法要好.车身垂直加速度改善14.71%,悬架动行程改善3.4%,轮胎动变形改善4.8%.采用第二种控制方法后,在本文所设计的仿真条件下,车辆的平顺性与操稳性能都得到改善.
1 陈士安,刘红光,陆森林.汽车主动悬架四自由度模糊控制系统.汽车工程,2001,23(6):375~380(Chen SA,Liu H G,Lu SL.Fuzzy control system for four freedom active suspension of automobile.Automobile Engineering,2001,23(6):375~380(in Chinese))
2 管继富,武云鹏,黄华,顾亮.车辆半主动悬架的模糊控制.系统仿真学报,2007,19(5):1030~1033(Guan J F,FU Y P,HUANG H,GU L.Fuzzy control system for semiactive suspension of vehicle.Journal of System Simulation,2007,19(5):1030~1033(in Chinese))
3 Eski I,Yildirim S.Vibration control of vehicle active suspension system using a new robust neural network control system.Simulation Modeling Practice and Theory,2009,17:778~793
4 黄治国.空气悬架控制系统仿真及试验研究[硕士学位论文].吉林:吉林大学,2005(Huang ZG.Control system simulation and test research for air suspension[Master Thesis].Jinlin:Jinlin University,2005(in Chinese))
5 Guclu R.Fuzzy logic control of seat vibrations of a nonlinear full vehicle model.Nonlinear Dynamics,2005,40:21~34
6 田佳雨,申永军,赵永香.含时滞的半主动系统动力学分析.动力学与控制学报,2013,11(1):65~69(Tian JY,Shen Y J,Zhao Y X.Dynamical analysis of semi-active system with time-delay.Journal of Dynamics and Control,2013,11(1):65~69(in Chinese) )
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
液压与气动(2020年4期)2020-04-10 07:38:52
新课程·下旬(2018年10期)2018-01-28 10:56:30
北京汽车(2016年6期)2016-10-13 17:07:50
现代制造技术与装备(2015年4期)2015-12-23 10:20:18
计量学报(2014年3期)2014-06-07 10:02:35
航天器工程(2014年5期)2014-03-11 16:35:53
汽车维护与修理(2014年10期)2014-02-28 12:15:00
机械与电子(2014年2期)2014-02-28 02:07:44