
基于能量回收的等效燃油消耗最小策略*
2015-04-18 07:51苗强孙强白书战李国祥
华南理工大学学报(自然科学版) 2015年11期
苗强 孙强 白书战 李国祥
(山东大学 能源与动力工程学院, 山东 济南 250061)
基于能量回收的等效燃油消耗最小策略*
苗强 孙强 白书战 李国祥
(山东大学 能源与动力工程学院, 山东 济南 250061)
在混合动力能量管理策略中,基于电池荷电状态(SOC)反馈的等效燃油最小控制策略(ECMS)在某些时刻点由于惩罚函数取值不合适,会出现惩罚过度,导致燃油消耗量的增加.文中采用一种可变SOC参照的方式来解决这一问题:在工况已知的情况下,将行驶工况划分为若干个运动学区间,任意区间中,用电池初始剩余容量减去该区间的制动回收能量,差值作为该区间中电池倾向于放电时的参考值,并以此为基础构建等效因子.最后以标准行驶循环工况NEDC为例,运行基于ECMS框架的整车模型.仿真结果表明,与传统的基于固定SOC参照的ECMS相比,文中提出的方法在维持电量不变的同时提高了燃油经济性.
混合动力汽车;再生制动;等效燃油消耗最小策略;电池荷电状态;惩罚函数
燃油经济性一直是混合动力汽车能量管理策略研究中的热点.近年来,国内外众多学者运用不同的理论方法对这一问题进行了深入研究,并发表了一系列成果,如基于动态规划的全局优化控制理论[1- 3],基于最小化原理的最优控制[4- 6]、基于等效燃油消耗的瞬时优化控制[7- 11]等.基于等效燃油最小控制策略(ECMS)的瞬时优化策略由于具有结构简单、运算量小及无需先验知识等优点而被广泛研究[12- 15],其控制结果同动态规划相比误差很小[16- 19],完全可以作为混合动力汽车的实时控制策略.目前基于ECMS的研究主要集中于等效因子的构建,例如,文献[9]中以概率的形式调整等效因子,文献[11]中计算各个工况下的最佳等效因子,利用工况识别技术来动态调整等效因子.由于传统的ECMS不能很好地维持电池电量,因此又出现了文献[12- 13]中提出的基于电池荷电状态(SOC)反馈的ECMS控制策略,为了维持电量平衡,在等效因子前面加上基于SOC的惩罚函数,当SOC远离初始值时,对相应的充、放电等效因子进行惩罚,从而使SOC始终在其初始值处波动,确保了电池电量平衡.
但是,以前的惩罚函数研究大多是基于固定SOC参照,这就导致了在某些时刻点由于惩罚过度会引起不必要的燃油经济性损失.为此,文中以一种单轴并联式混合动力汽车为原型车,提出了一种基于可变SOC参照的ECMS能量管理策略,通过动态调整惩罚函数的SOC参考值,在维持电量平衡方面取得与基于固定SOC参照的ECMS相同的结果,同时最大程度地保留电池充放电转矩最优值,避免因惩罚力度过大引起的燃油消耗量增加.
1 动力总成系统建模
1.1 系统整体结构
文中选用的混合动力汽车的动力总成系统整体结构如图1所示.
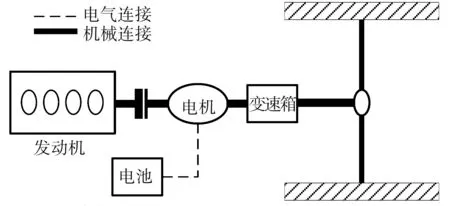
图1 动力总成系统的拓扑结构
电机和发动机之间通过离合器连接.系统各部分有各自对应的控制器,整车控制器根据控制策略来决定各个部分的动作,并将指令发送到相应的控制器.
1.2 系统动力学模型
由于发动机跟电机同轴相连,在离合器闭合时转速相同,因此可以直接使用转矩而不是功率来建模.具体运动学方程如式(1)-(3)所示:
(1)
(2)
(3)
式中:Tw为车辆行驶所需力矩;Tt为发动机和电机所需提供的力矩;Tbrake为制动力矩;m为汽车质量;g为重力加速度;f为滚动阻力系数;CD为空气阻力系数;A为迎风面积;ρ为空气密度;u为无风时的汽车速度;i为道路坡度,此处简化为0;ig、i0分别为变速箱传动比和主减速器传动比;δ为汽车旋转质量换算系数,此处简化为1;rw为车轮半径;ωaxis为变速箱输入轴的旋转角速度;t为时间.
1.3 系统关键部件模型
1.3.1 发动机模型
发动机的动力性方程为
Te=Te_max(ne)-Tf(ne)
(4)
式中,Te为发动机实际输出扭矩,Te_max为发动机在转速ne下所能提供的最大扭矩,Tf为发动机在转速ne下的摩擦扭矩.
发动机燃油经济性方程为
(5)


1.3.2 电机模型
由于电机工作效率受电机工作状态的影响很大,电机模型必须包含电机的工作效率与电机工作状态的关联性.为简化模型,同发动机建模一样,文中使用电机的万有特性和外特性试验数据建模:
Tm=Tm_max(nm)αm
(6)
ηm=f(Tm,nm)
(7)
(8)
式中:Tm为电机输出扭矩;nm为电机当前转速;Tm_max为电机在转速nm下所能提供的最大扭矩;αm为电机需求扭矩与Tm_max的比值,其范围为[-1,1];ηm为电机的效率,是Tm和nm的函数;Pm为电机需求功率.
Tm_max和ηm可以通过查询电机效率万有特性曲线经插值计算获得.
1.3.3 电池模型
电池模型采用内阻-开路模型,其动态关系式为
Ub=Ub(SOC)
(9)
(10)
(11)
(12)
(13)
式中:Ub为电池端电压,是关于SOC的函数,可以通过查表获得;SOC为电池荷电状态;SOC0为电池初始荷电状态;C为电池容量;Ib为电池瞬时电流;Rb为电池内阻;Pb为电池功率,其值等于电机功率Pm;ηb为电池工作效率;ηdis、ηchg分别为电池充、放电效率,为简化计算将其设为定值.
2 可变SOC参照的ECMS模型
2.1 可变SOC参照的提出
传统ECMS策略(记为ECMS1)的代价函数为
(14)

(15)

由于ECMS1不能很好地维持SOC的平衡,所以出现了基于SOC反馈的ECMS策略(记为ECMS2),其核心是根据决策SOC偏离初始SOC的范围来实施惩罚,具体的电池等效燃油消耗率变为
(16)
式中,f(ΔSOC)为基于ΔSOC=SOC(t)-SOCref的惩罚函数.
关于SOC的惩罚函数对燃油经济性的影响在电机需求转矩为正值时比较大,因此,文中主要研究电池倾向于放电时的情况.
定义较大放电时刻如下:设t时刻电机需求转矩取值范围Tm∈[Tmin,Td],其中Td>0,如果以ECMS1得到的计算结果使电机需求转矩为Td,则称t为较大放电时刻.此时最优代价函数为
(17)
电池SOC变为
SOC*=SOC(Td,n,t)
(18)
式中,SOC可以根据电机模型和电池模型的公式由电机需求扭矩Td和当前转速n求得.
而在ECMS2中,为了实现对SOC的调节,在上述假设中,由于倾向于较大放电量,惩罚系数f(ΔSOC)会变大以阻止SOC的进一步减小,从而使电机输出扭矩倾向于取小于Td的值T′,此时获得的最优代价函数为
(19)
电池SOC变为
SOC*′=SOC(T′,n,t)
(20)

(21)
记电池少释放的电能为
ΔEsave=|Pm(T′-Td)|
(22)
如果ΔEcon>ΔEsave,则会使瞬时燃油消耗无法达到最优值.
上述分析过程说明:在控制策略倾向于较大放电量的时刻,由于以固定SOC为参照的惩罚系数过大,会导致系统无法得到最优取值,此时适合减小惩罚系数,即降低SOC参考标准.而过低的SOC参考标准将会导致最终电量无法维持平衡,因此必须寻找合适的SOC参考值,既使电量维持在一定的水平,又防止惩罚过度.
为此,文中引入行驶工况构建理论中的运动学区间概念.运动学区间定义为车辆从一次停车开始到下一次停车开始的区间[20],图2为运动学区间示意图.
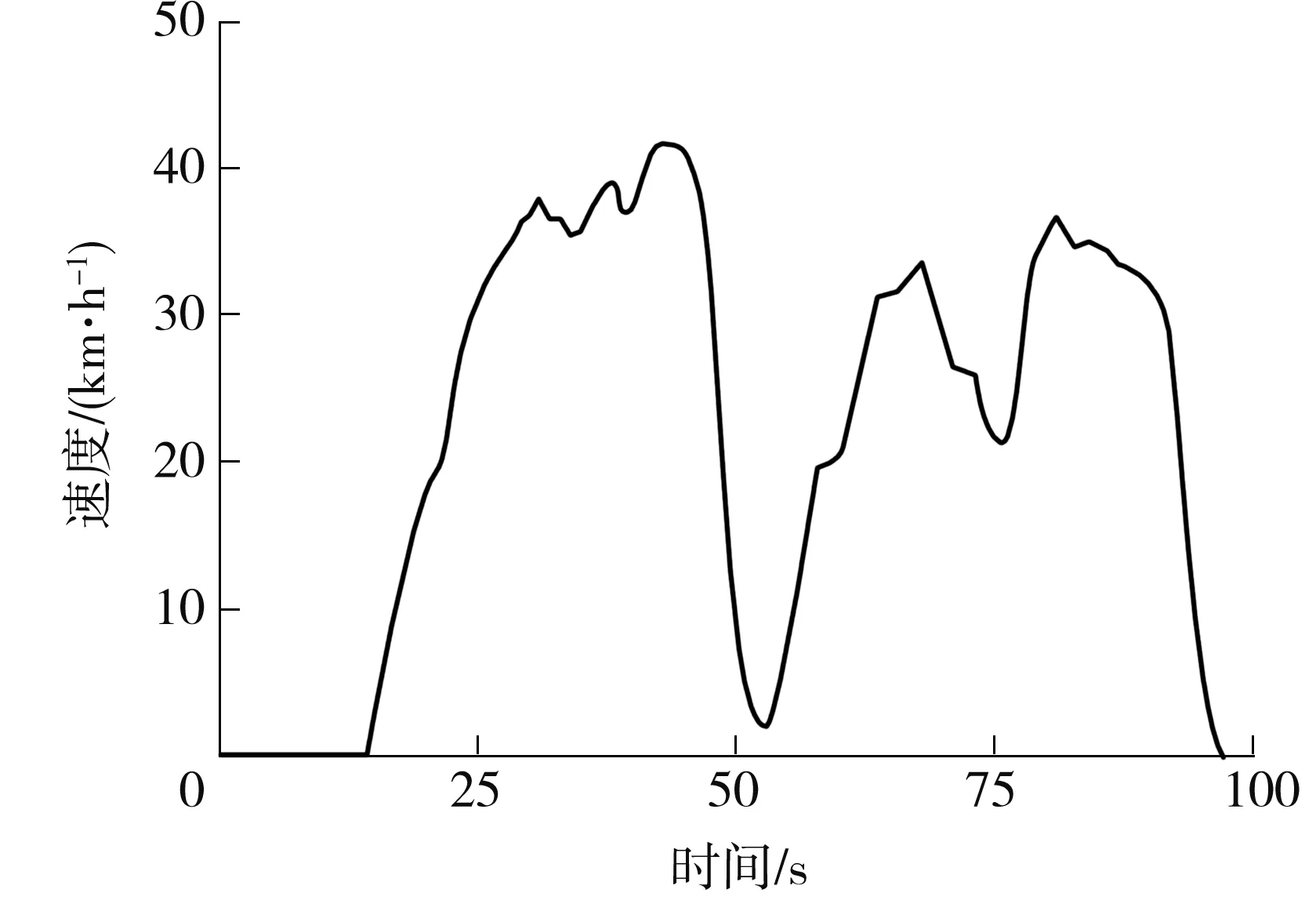
图2 运动学区间示意图
在工况已知的情况下,将行驶工况划分为若干个运动学区间,计算第i个区间中的制动回收能量Qr(i),以初始电池容量Q0减去Qr(i),由差值计算出的荷电状态为SOCref(i),以此作为电池倾向于较大放电量时的惩罚系数的参照.具体计算公式如下:
Tmr(t)=Tbreak(t)
(23)
(24)
(25)
式中,Tbreak为当前时刻扣除了车辆自身阻力矩之后,为了实现对应的减速效果而必需的制动力矩,其值通过公式(1)-(3)计算获取,且为简化计算,假设全部由电机通过回收能量来实现;Tmr为电机需提供的再生制动力矩;N为第i个运动学区间中减速片段的总个数,在图2所示的运动学区间中共有5个减速片段,即N=5;t_start(j)、t_end(j)分别为该运动学区间中的第j个减速片段;电机当前状态下的充电效率ηm可通过查表获得;SOCref(i)为大放电量时刻惩罚函数的新的SOC参考值.
2.2 可变SOC参照的ECMS模型构建
依据上述分析,基于可变SOC参照的ECMS控制策略(记为ECMS3)的算法步骤如下.
步骤1 将行驶工况划分为m个运动学区间,以公式(23)-(25)计算第i个区间中的制动回收能量Qr(i),并计算对应的SOCref(i).

步骤3 如果ΔEcon>ΔEsave,则惩罚函数的SOC参考值变为SOCref(i);如果ΔEcon<ΔEsave,则惩罚函数的SOC参考值不变.
步骤4 重复步骤2和3,直到行驶工况结束.
可变SOC参照的ECMS模型构建流程如图3所示.
通过上述流程可以获得基于能量回收的可变SOC参照的ECMS模型动态方程如下:
(26)

(27)
方程组运行的边界条件为
(28)
式中,f(ΔSOCvar,ΔSOC)是以上述算法计算选择出的当前时刻SOC与可变SOC参照的差值;Jopt(t)为t时刻最佳燃油消耗率.
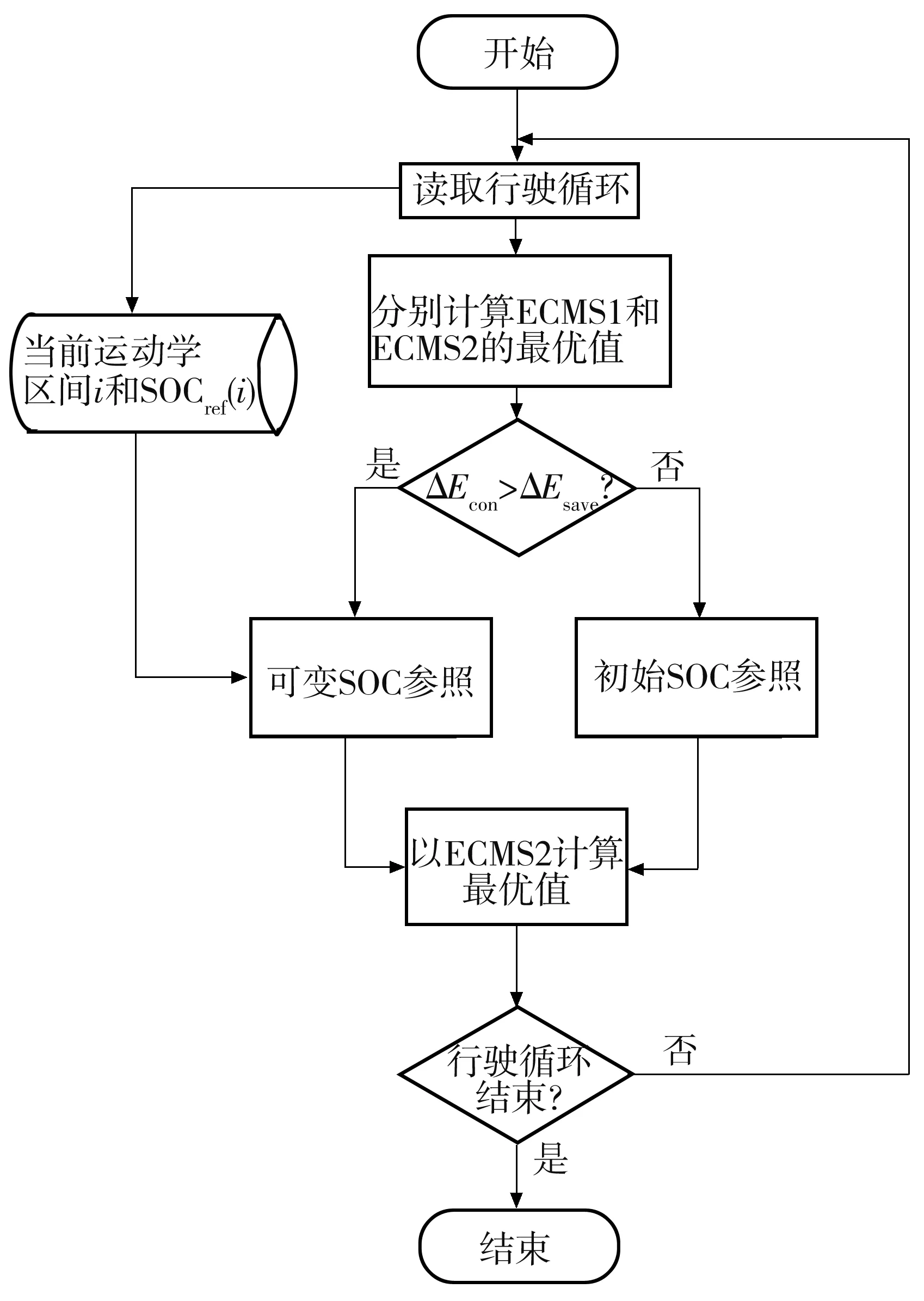
图3 可变SOC参照的ECMS仿真过程
Fig.3 Simulation process of ECMS with variable SOC reference
3 仿真验证
为验证所提出的方法的有效性,选取表1所示的混合动力系统参数进行建模仿真.
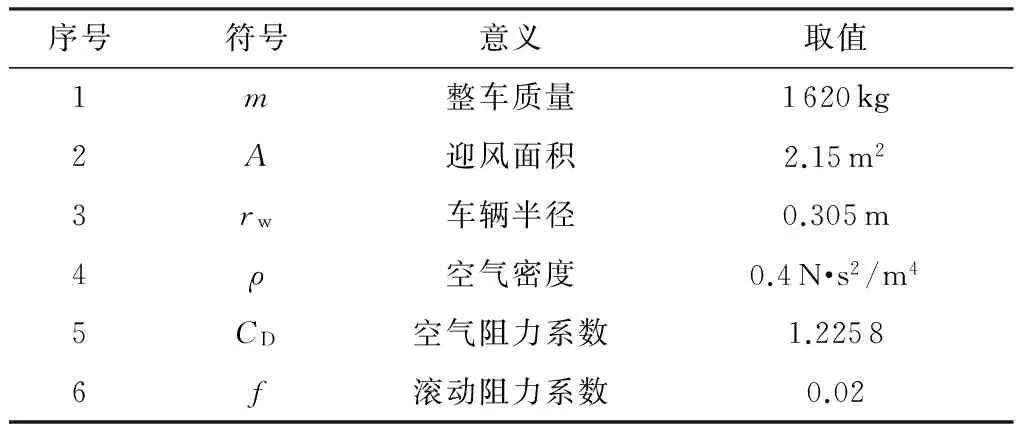
表1 混合动力系统仿真参数
在Matlab Simulink中搭建如图4所示的模型,并以新欧洲循环工况(NEDC)(如图5所示)为试验工况进行验证.
利用文献[10]的方法计算得NEDC的充、放电等效因子的最佳数值为sdis=2.15,schg=1.89.
另外,ECMS2中的惩罚函数为
f(SOCref)=f0+K(SOCref-SOC(t))
(29)
式中:f0=1;SOCref根据ECMS3模型中的选择结果取一动态值;K的取值根据多次仿真结果取最优值,这里K=2.08.
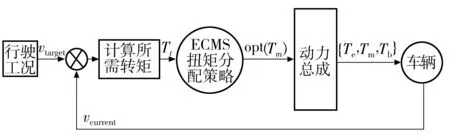
图4 混合动力系统的仿真结构
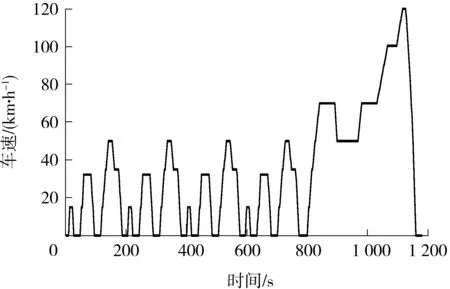
图5 标准NEDC行驶循环工况
根据运动学区间的定义,在Matlab中将NEDC划分为13个运动学区间,其中区间1-12只有一个减速片段,区间13有两个减速片段.由公式(23)-(25)计算得到每个区间的制动回收能量和相对应的SOC参考值,列于表2.
表2 标准工况NEDC划分的运动学区间及其相关参数值
Table 2 Kinematics ranges and related parameter values of standard NEDC cycle
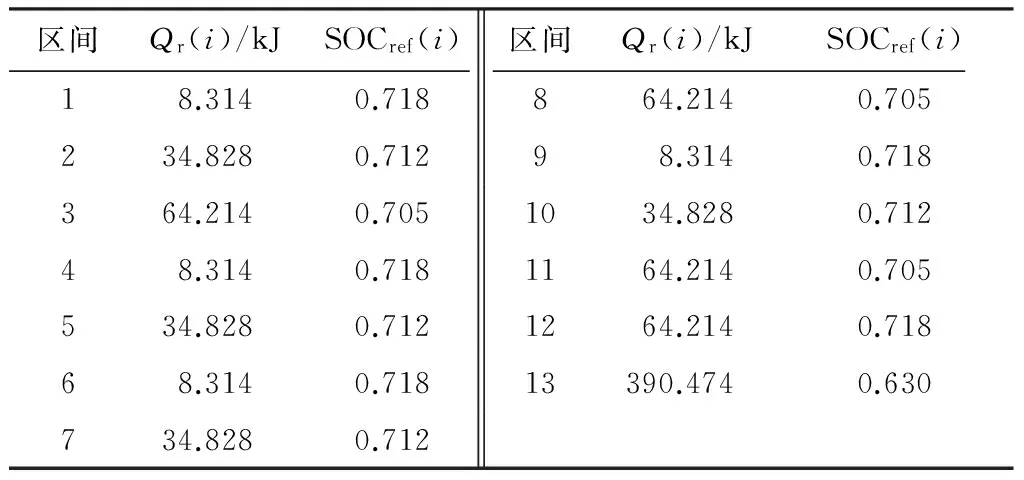
区间Qr(i)/kJSOCref(i)区间Qr(i)/kJSOCref(i)18.3140.718864.2140.705234.8280.71298.3140.718364.2140.7051034.8280.71248.3140.7181164.2140.705534.8280.7121264.2140.71868.3140.71813390.4740.630734.8280.712
为便于对比分析,给出由ECMS1、ECMS2和ECMS3得到的电池SOC的变化情况(如图6所示),以及在整个循环过程中3种不同策略的电机工作状况(如图7所示).整个行驶循环的最佳等效能量消耗见表3.
由于文中主要是研究基于SOC的惩罚函数对运行结果的影响,因此有必要以ECMS1得出的结果为参考来说明问题.由于控制策略内部定义了SOC结合图7可以进一步分析图6中的几个现象:
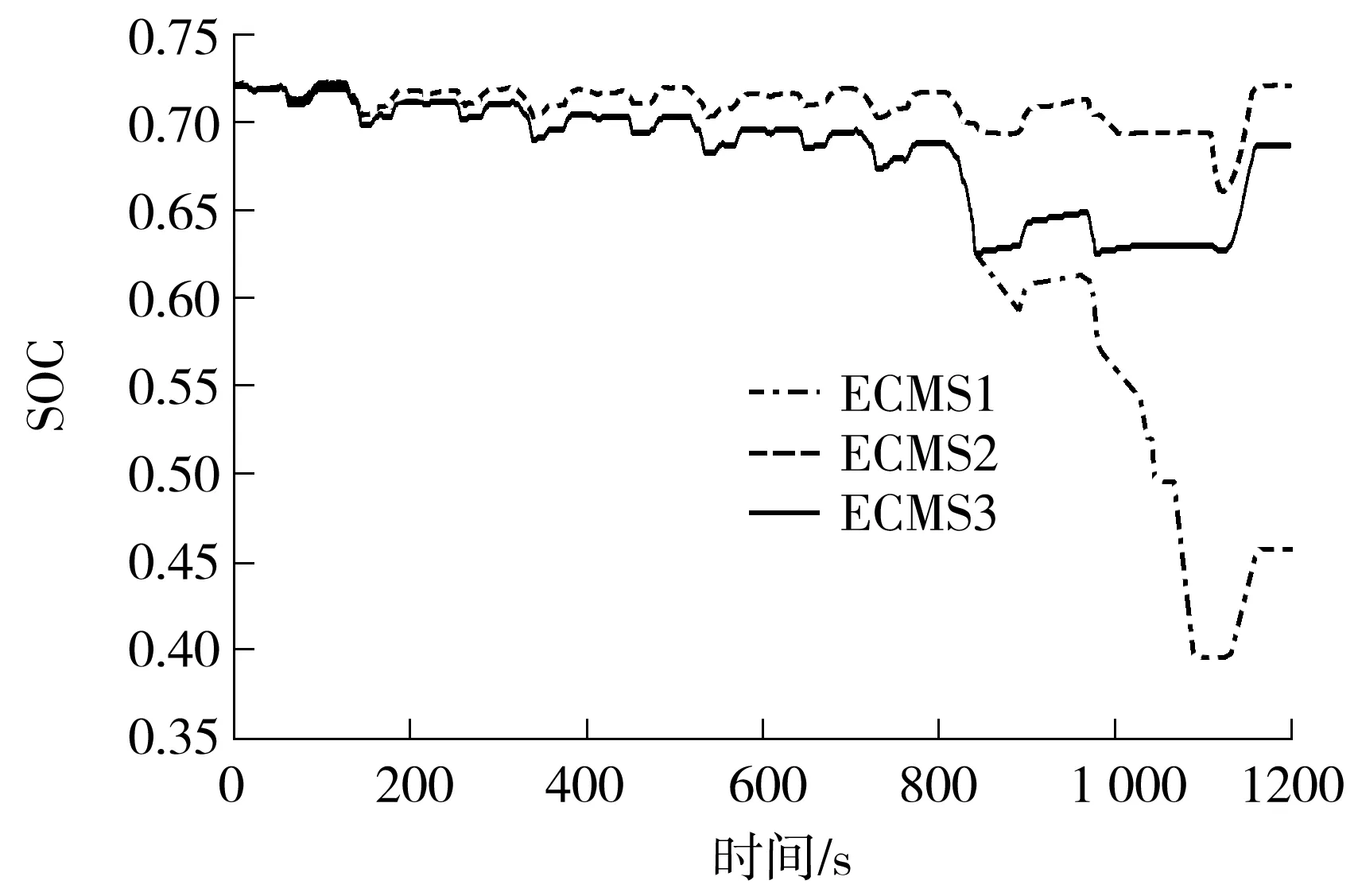
图6 不同ECMS模型所得到的SOC曲线
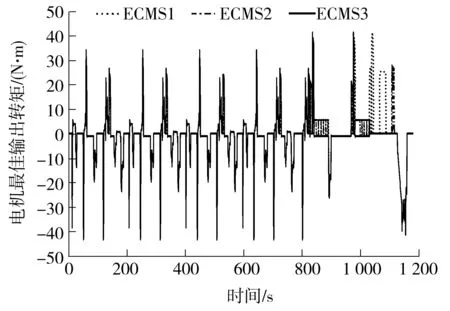
图7 不同ECMS模型下的电机最佳输出转矩Fig.7 Best output torques of motor under different ECMS models
Table 3 Final equivalent energy consumption of three different ECMS models

控制方法ECMS1ECMS2ECMS3等效能量消耗/kJ290522908129058
范围为0.4~0.9,因此由图6可知,即使放电量最多的ECMS1策略的SOC也维持在该范围内.其中:ECMS1的最终SOC为0.46,与初始SOC值0.72的偏差度为36.1%,在3种策略中偏差度最高;ECMS2的最终SOC偏差度为2.1%,在3种策略中最低;ECMS3的最终SOC为0.69,偏差度为4.2%,非常接近ECMS2策略,能够满足电量维持型ECMS策略的基本要求.结合表3所列等效能量消耗来看,ECMS3策略仅比ECMS1多消耗6 kJ,而ECMS2比ECMS1多消耗29 kJ,从而可知,ECMS3比ECMS2减少了23 kJ的等效能量消耗.从以上数据可以看出,ECMS3策略综合了ECMS1和ECMS2策略的优点.
(1)ECMS1策略的结果表明,在车辆大功率需求时,电机能够输出大扭矩(即电机“出力”明显),而ECMS2和ECMS3效果不明显.
ECMS1效果明显的原因在于:由于没有SOC反馈,因此在电机倾向于大扭矩输出时,控制策略只考虑最低SOC限值,使电池持续放电,电机能够输出较大扭矩辅助发动机工作.
ECMS2和ECMS3效果不明显的原因在于:首先,在800 s之前,即第1-12个运动学区间内,在车辆功率需求较大时(即每一个区间的加速时段),ECMS2和ECMS3能够同ECMS1策略一样具有较为明显的电机扭矩输出,即电机“出力”明显;而在800 s之后,ECMS2和ECMS3的电机输出扭矩不能跟随ECMS1的电机输出扭矩,驱动效果不明显.笔者在仿真中发现,等效燃油消耗量对等效因子的敏感度较高,等效因子稍微变化就会导致不同的策略选择结果.由于ECMS2和ECMS3具有SOC反馈,其最终表现形式是改变了等效因子的大小.前800 s时间内,由于SOC与初始值相差很小,惩罚力度不大,因此其能够基本跟踪ECMS1扭矩输出;而在运动学区间13,由于ECMS2和ECMS3的实际SOC与初始SOC差距很大(特别是ECMS3策略),所以惩罚力度很大,当电机输出扭矩为大扭矩输出时,加大了对电池放电的惩罚力度,计算得到的等效燃油消耗会比较大,并且由于此时段发动机自身的最大输出扭矩能够满足动力性需求,导致控制策略决定的电机输出扭矩偏小或是为0.
(2)相比于ECMS2,ECMS3在整个循环过程中能够大部分时间跟踪ECMS1的电机扭矩输出.
由于ECMS2中的惩罚函数基于固定的SOC参考值,因此在SOC偏离初始SOC时,惩罚力度线性增加,限制电机转矩输出,从而导致SOC变化范围不大;而ECMS3中在每一个运动学区间都能够适时降低SOC参考值,使得惩罚函数在前900 s内的惩罚力度较小,电机实际输出转矩能够跟踪ECMS1的输出转矩,电池放电量增大,致使实际SOC迅速下降;同时,在900~1 100 s内,由于实际SOC与初始SOC差距变大,惩罚力度大幅增加,而等效燃油消耗量对等效因子敏感度较大,这在一定程度上限制了电机转矩输出,确保了SOC不会进一步下降,从而维持了电量平衡.
4 结语
具有SOC反馈的ECMS策略中,基于固定SOC参照的惩罚函数在动力电池倾向于较大放电量的状态下,由于惩罚过度会导致燃油消耗量增加.为解决此问题,文中提出了一种利用运动学区间制动回收能量来不断调整SOC参照的方法,以此来控制惩罚力度,提供燃油经济性.以标准行驶循环NEDC为试验工况的仿真结果表明:文中提出的方法在初始电池SOC为0.72的情况下,最终SOC达0.69,偏差度仅为4.2%,能够满足电量维持的基本要求;且与基于固定SOC参照的ECMS策略相比,减少了23 kJ的等效能量消耗,在一定程度上提高了燃油经济性.
文中提出的方法是基于行驶工况已知的情况,要将其有效应用到实际中去,未来的研究内容中应该加入工况识别部分,为实现实时优化、进一步降低等效燃油消耗提供支持.
[1] Sundstrom O,Ambuhl D,Guzzella L.On implementation of dynamic programming for optimal control problems with final state constraints [J].Oil & Gas Science and Technology-Rev:IFP,2010,65(1):91- 102.
[2] Xi Jun-qiang,Ma Zheng-jun,Hu Yu-hui.Application of dynamic programming algorithm in study of energy management strategy for single-shaft parallel hybrid electric vehicle [J].Journal of Beijing Institute of Technology:English Edition,2014,23(12):117- 122.
[3] Chen Rui,Zou Yuan,Hou Shi-jie.Energy management stra-tegy for hybrid electric tracked vehicle based on dynamic programming [J].Lecture Notes in Electrical Engineering,2011,98(2):843- 851.
[4] Zheng C H,Xu G Q,Cha S W,et al.Numerical comparison of ECMS and PMP-based optimal control strategy in hybrid vehicles [J].International Journal of Automotive Technology,2014,15(7):1189- 1196.
[5] Kim Namwook,Rousseau Aymeric,Lee Daeheung.A jump condition of PMP-based control for PHEVs [J].Journal of Power Sources,2011,196(23):10380- 10386.
[6] Hemi Hanane,Ghouili Jamel,Cheriti Ahmed.Combination of Markov chain and optimal control solved by Pontryagin’s minimum principle for a fuel cell/super capacitor vehicle [J].Energy Conversion and Management,2015,91(2):387- 393.
[7] 秦大同,隗寒冰,段志辉,等.重度混合动力汽车油耗和排放度目标实时最优控制 [J].机械工程学报,2012,48(6):83- 89. Qin Da-tong,Wei Han-bing,Duan Zhi-hui,et al.Multiple objective real-time optimum control strategy for fuel consumption and emission of full hybrid electric vehicle [J].Journal of Mechanical Engineering,2012,48(6):83- 89.
[8] Volkan Sezer,Metin Gokasan,Seta Bogosyan.A novel ECMS and combined cost map approach for high-efficiency series hybrid electric vehicles [J].IEEE Transactions on Vehi-cular Technology,2011,60(8):3557- 3570.
[9] Sciarretta A,Back M,Guzzella L.Optimal control of parallel hybrid electric vehicles [J].IEEE Transactions on Control Systems Technology,2004,12(3):352- 363.
[10] Wang Jun,Wang Qing-nian,Wang Peng-yu,et al.The development and verification of a novel ECMS of hybrid electric bus [J].Mathematical Problems in Engineering,2014,2014:981845/1- 14.
[11] 林歆悠,孙冬野.基于ECMS混联式混合动力客车工况识别控制策略 [J].湖南大学学报:自然科学版,2012,39(10):43- 49. Lin Xin-you,Sun Dong-ye.Driving pattern recognition based on ECMS and its application to control strategy for a series-parallel hybrid electric bus [J].Journal of Hunan University:Natural Science Edition,2012,39(10):43- 49.
[12] Gao J-P,Zhu G-M G,Strangas E G,et al.Equivalent fuel consumption optimal control of a series hybrid electric vehicle [J].Proceedings of the Institution of Mechanical Engineers D,2009,223(8):1003- 1018.
[13] Simona O,Lorenzo S,Giorgio R.Adaptive equivalent consumption minimization strategy for hybrid electric vehicles [C]∥Proceedings of the ASME Dynamic Systems and Control Conference,Dynamic Systems and Control Division.Cambridge:American Society of Mechanical Engineers,2010:499- 505.
[14] Chen Ze-yu,Tong Shang-e,Jiao Bin.Optimal control of energy management system for parallel hybrid electric vehicles using R-ECMS algorithm [J].Energy Education Science and Technology Part A:Energy Science and Research,2014,32(4):2585- 2598.
[15] Geng Bo,Mills James K,Sun Dong.Energy management control of micro turbine-powered plug-in hybrid electric vehicles using the telemetry equivalent consumption mi-nimization strategy [J].IEEE Transactions on Vehicular Technology,2011,60(9):4238- 4248.
[16] Nüesch Tobias,Cerofolini Alberto,Mancini Giorgio,et al.Equivalent consumption minimization strategy for the control of real driving NOxemissions of a diesel hybrid electric vehicle [J].Energies,2014,7(5):3148- 3178.
[17] Sciarretta A,Serrao L,Dewangan P C,et al.A control benchmark on the energy management of a plug-in hybrid electric vehicle [J].Control Engineering Practice,2014,29(SI):287- 298.
[18] Marano V,Tulpule P,Stockar S,et al.Comparative study of different control strategies for plug-in hybrid electric vehicles [C]∥Proceedings of the 9th International Conference on Engines and Vehicles.Naples:SAE International,2009.
[19] Zhao De-zong,Stobart Richard,Dong Guang-yu,et al.Real-time energy management for diesel heavy duty hybrid electric vehicles [J].IEEE Transactions on Control Systems Technology,2015,23(3):829- 841.
[20] 孙强,白书战,韩尔樑,等.基于试验测量的瞬时行驶工况构建 [J].吉林大学学报:工学版,2015,45(2):364- 370. Sun Qiang,Bai Shu-zhan,Han Er-liang,et al.Instanta-neous driving cycle construction based on experimental measurement [J].Journal of Jilin University:Engineering and Technology Edition,2015,45(2):364- 370.
Equivalent Fuel Consumption Minimization Strategy Based on Energy Recovery
MiaoQiangSunQiangBaiShu-zhanLiGuo-xiang
(School of Energy and Power Engineering,Shandong University,Jinan 250061,Shandong,China)
In the energy strategies of hybrid electric vehicles,traditional equivalent consumption minimization strategy (ECMS),which has a feedback circuit on the basis of the battery state of charge (SOC),may lead to an increase in fuel consumption because the inappropriate value of punishment function causes excessive-punishment.In order to solve this problem,a method on the basis of variable reference of SOC is proposed.In this method,with the pre-knowledge on the driving cycle,the cycle is divided into several kinematics fragments.In arbitrary fragment,the value of braking recovery energy in this fragment is subtracted from the initial residual capacity value of battery,and the difference value is taken as the new SOC-reference of punishment function when the ECMS tends to discharge largely.On this basis,an equivalent factor is established.Finally,a simulation model with ECMS framework is run under the NEDC cycle.Simulation results show that,in comparison with the traditional ECMS on the basis of the fixed SOC-reference,the proposed method helps improve fuel economy and maintain power balance.
hybrid electric vehicle;regenerative braking;equivalent fuel consumption minimization strategy;state of charge;penalty function
2015- 05- 11
山东省优秀中青年科学家奖励计划项目(BS2013NJ012);山东省重点科技研发计划项目(2015GSF117013);重庆大学机械传动国家重点实验室开放课题(SKLMT-KFKT-201512) Foundation items: Supported by the Outstanding Young Scientists Award Project of Shandong Province(BS2013NJ012) and the Key Technology Research and Development Project of Shandong Province(2015GSF117013)
苗强(1988-),男,博士生,主要从事混合动力汽车控制策略研究.E-mail: miaoq_sdu@163.com
1000- 565X(2015)11- 0112- 07
U 469.72
10.3969/j.issn.1000-565X.2015.11.016
猜你喜欢
装备制造技术(2020年2期)2020-12-14
河北省科学院学报(2020年1期)2020-05-25
小读者(2020年2期)2020-03-12
阅读(快乐英语高年级)(2019年11期)2019-09-10
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
趣味(语文)(2018年1期)2018-05-25
凿岩机械气动工具(2017年3期)2017-11-22
电子产品可靠性与环境试验(2016年6期)2016-05-17
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
