一种基于模糊故障Petri网的三相异步电动机故障分析方法
2015-04-06 08:23程学珍于永进伊利峰
电工技术学报 2015年17期
程学珍 王 程 于永进 伊利峰 陈 强
(1.山东科技大学矿山灾害预防控制省部共建国家重点实验室培育基地 青岛 266590 2.山东科技大学电气与自动化工程学院 青岛 266590)
一种基于模糊故障Petri网的三相异步电动机故障分析方法
程学珍1,2王 程1,2于永进1,2伊利峰2陈 强1,2
(1.山东科技大学矿山灾害预防控制省部共建国家重点实验室培育基地 青岛 266590 2.山东科技大学电气与自动化工程学院 青岛 266590)
为提高三相异步电动机运行的稳定性,采用模糊故障Petri网理论对运行电动机进行状态评价与故障诊断。根据电动机故障逻辑关系,结合Petri网建模方法,建立电动机的模糊故障Petri网模型;提出变迁使能点火判别矩阵,结合MYCIN置信度矩阵法的正向推理算法,实现电动机运行状态的准确评价;逆向推理算法即为故障诊断过程,提出一种更为简洁的全矩阵推理算法,使诊断速度极大提高;采用最小割集理论进行优先诊断能够很好地避免诊断的盲目性;最后对电动机部分故障模型进行演绎分析,并通过故障树、统计数据和方法对比验证推理模型的可靠性和合理性。
模糊故障Petri网 三相异步电动机 状态评价与故障诊断 矩阵推理 最小割集
0 引言
三相异步电动机(以下称电动机)广泛应用于国民生产中的各方面。生产过程中需要对电动机进行在线监测,通过监测电动机运行状态,采集运行数据进行分析,从而判断电动机故障原因和故障严重程度[1]。目前国内外有关电动机故障诊断和分析方面的研究很多,但大多集中在转子断条、偏心、定子短路等单一故障方面,难以满足电动机整体故障诊断的需求。因此,寻求整体、合理的故障诊断方法,使其能够有效、清晰地进行故障评价和诊断具有重要意义。
Petri网因具有良好的并行计算和矩阵运算的能力以及便捷的图形化的表示方法[2],许多学者将其应用到故障诊断中。文献[3]应用Petri网模型解决了知识表示问题,但故障诊断往往存在不确定性,使得故障信息的表达不充分。文献[4]将模糊技术与Petri网相结合,提出模糊Petri网(Fuzzy Petri Net,FPN)的建模方法,并指出FPN中库所的值表示命题的置信度,其值在0~1之间,有效解决了不确定性问题,但未给出FPN的动态推理方法。文献[5]根据模糊产生式规则,提出置信度矩阵推理算法。这些研究虽然在系统故障分析中取得了重大进步,但故障传播的固有特性未得到体现。文献[6]定义了带有激发矩阵的故障Petri网,提出了故障Petri网的激发矩阵分析方法,解决了故障建模中描述故障状态变化过程的问题;文献[7]结合模糊Petri网和故障Petri网在故障传播、诊断和推理过程中的优点,提出了模糊故障Petri网(Fuzzy Fault Petri Net,FFPN)的概念,并进行了机械故障诊断的建模及应用,取得了一定成效,但无具体的矩阵推理算法。
本文提出一种应用矩阵推理的模糊故障Petri网对电动机进行故障分析的方法。对煤矿中采煤用隔爆型三相异步电动机进行了故障分析,建立了整体的采煤用隔爆型三相异步电动机FFPN故障模型,定义了变迁点火规则,提出了基于变迁点火规则的状态演绎矩阵方程,实现了正向推理与故障状态评价。在逆向故障推理中,改进逆向推理矩阵方程,并结合关联矩阵和最小割集,实现故障的全面、准确诊断。最后通过部分模型推理,验证了该方法的有效性。
1 模糊故障Petri网及其建模方法
1.1 模糊故障Petri网定义
模糊故障Petri网定义为一个10元组[6-11]
SFFPN=(P,T,I,O,M,Ω,α,f,H,U)

1.2FFPN的建模方法
模糊故障Petri网是结合了经典Petri网[12]和模糊Petri网[7,12]的优点而提出,其建模方法包括两方面:一是根据系统的逻辑关系建立基本的Petri网模型,二是根据变迁发生规则模拟系统的动态运行过程[7]。本文对定义电动机故障变迁发生规则进行重点研究。
对于任意的变迁t,若其所有输入库所的置信度与相应的输入弧上的权值乘积之和大于变迁的阈值,则称此变迁t预使能,若输入库所至少含有一个托肯,那么预使能变迁tj可触发点火,在后继的库所POj产生一个新的置信度α(pOj)。
本文用故障模式的一般形式来描述模型演绎规则和模糊信息的表达,一般形式参见文献[13]。
2 FFPN故障推理算法的研究
利用Petri网并行计算和矩阵运算的能力,并结合Petri网的可达性进行基于全矩阵的故障模型正反推理。在故障模型的推理之前,为了更好地表达推理矩阵运算,鉴于文献[5],定义如下算子:
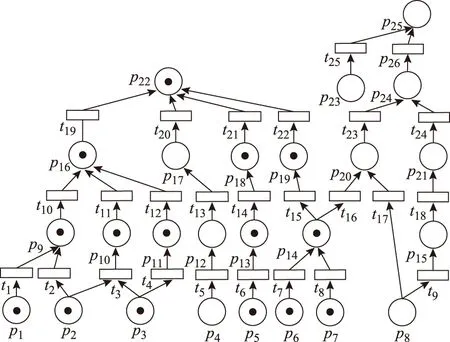
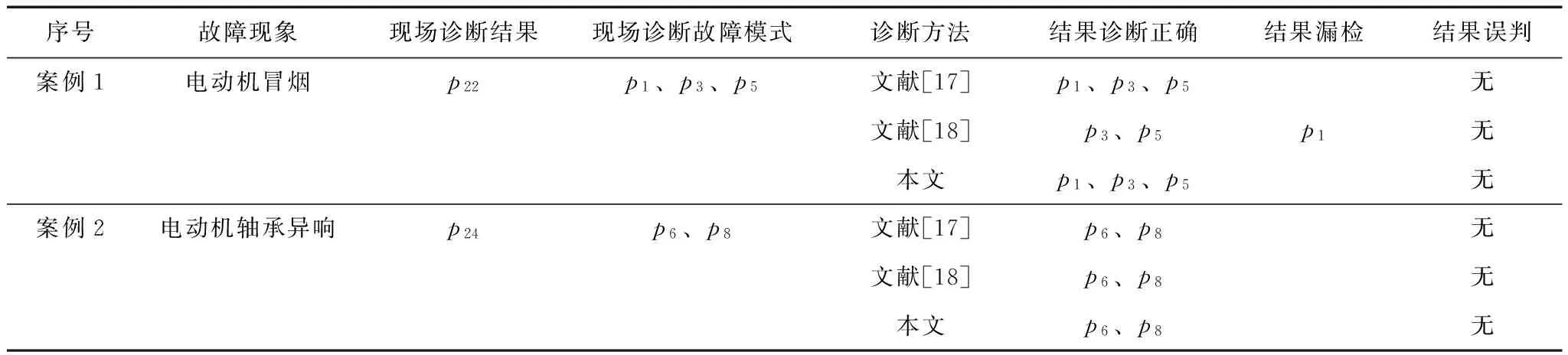
1)比较算子Θ:C=AΘB,A、B和C均为m×n矩阵,当aij>bij时,Cij=1; 当aij 2)取小算子∧:C=A∧B,A、B和C均为m×n矩阵,则cij=min(aij,bij),i=1,2,…,m;j=1,2,…,n。 3)取大算子⊕:C=A⊕B,A、B和C均为m×n矩阵,则cij=max(aij,bij),i=1,2,…,m;j=1,2,…,n。 5)直乘算子Δ: C=AΔB,A和C分别为m×n、n×m矩阵,B为n维矢量,则cij=aijbi,i=1,2,…,m;j=1,2,…,n。 2.1MYCIN的置信度方法 本文采用MYCIN的置信度推理法[11]来推导库所事件的置信度,推理可得全部库所的置信度值,依次作为故障评价与诊断的依据。公式为 (1) 当αk+1=αk时,推理结束,否则继续由αk求αk+1。 2.2 正向推理算法的研究 FFPN的正向推理过程通过在线监测可能出现的故障征兆,预测可能发生的故障,是对故障传播特性的反映。推理过程包括变迁点火的判别和故障状态标识(token)的流动。应用变迁点火判别矩阵得到变迁点火矢量,继而推导故障状态标识矢量,得到故障信息传播路径。从而对故障的产生和传播路径有全面的评估,实现故障的预测,减少设备故障的发生。 1)变迁点火判别矢量。 C(x)=xφ(x) (2) 首先,计算x的n维矢量 G(x)=I←·α (3) 式中G(x)=(g1,g2,…,gn)T, 表示库所置信度与权值的等效和值。其次,G(x)与变迁阈值矢量H比较 y=[G(x)φ(x)]ΘH (4) 式中y为变迁预使能判别矢量,y=(y1,y2,…,yn)T。 如果变迁满足点火条件,则点火矢量元素yi=1, 否则yi=0。 根据FFPN的点火规则,得到含有token的库所所对应变迁的使能点火矢量推导公式 (5) 式中(Mk-1-Mk-2)表示第k-1次新点火标识矢量。 2)故障状态标识矢量推理矩阵。 本文引用文献[14]的推导公式 Mk=Mk-1⊕(A⊗Yk) (6) 式中A为Petri网关联矩阵,A=I-O。 2.3 逆向推理算法的研究 FFPN的逆向推理是有故障现象发生时,寻求导致这一故障的原因。为迅速有效地检修故障源,引用最小割集的理论进行辅助故障推导和诊断。如果故障源有多个最小割集,则根据最小割集故障发生率确定优先诊断顺序。 定义3 若最小割集G={p1,p2,…,pn}, 则最小割集故障发生率为 (7) FFPN的逆向推理的输入、输出库所分别为正向输出、输入库所,即I-=O,O-=I。 在文献[8]推理矩阵的基础上,提出改进逆向推理矩阵为 (8) 隔爆型三相异步电动机是应用于存在爆炸性气体环境的重要电气设备,作为传动机的原动力工具。其正确使用直接关系到工矿企业的安全生产,是企业经济效益的保障。电动机设备的故障较为复杂,经常会遇到一个故障对应多种征兆,或一种故障征兆是由多个故障引起的情况[15]。本文简化分析电动机的基本故障为转子故障、定子故障、供电质量问题、机械部件故障及其他外部故障,这些故障通常较为隐秘,通过影响电动机运行的其他因素,产生工作人员通过五官能感受到的故障,可综合分为4大类故障,具体的故障模式如图1所示。 图1 电动机故障系统FFPN模型图Fig.1 Motor fault system FFPN model diagram 代号故障事件代号故障事件代号故障事件p1/X1电动机负载过大p16/M8电动机运行过热p31电源控制回路开关接触不良p2/X2转子绕组短路p17/M9电动机缺相运行p32转子绕组机械故障p3/X3某相绕组电阻变小p18/Ma电动机转动异常或卡机p33电动机中心线与采煤机中心线不一致p4/X4熔断器熔体故障p19/Mb电动机绝缘老化p34转子轴向窜动p5/X5轴封环结构损坏p20/Mc润滑油量减少p35弹簧压紧装置故障p6/X6油封材料过热p21/Md曲路环与轴孔产生摩擦p36电动机扫膛p7/X7密封表面轴粗糙度值过大p22/T1电动机绕组绝缘烧毁p37定子电流增大p8/X8温度过高p23/X9电动机超载或无规律冲击负荷p38压降过大p9/M1转速下降p24/Me轴承过度磨损p39电动机运行振动过大p10/M2某相电流过大p25/T2电动机抱轴p40轴承噪音过大p11/M3激磁电流过大p26轴承锁紧装置故障p41电动机转动无力或不转且有嗡嗡声p12/M4某相电压缺失p27转子铁心变形p42电动机运行有异响p13/M5转轴间隙进入异物p28磁性槽楔破裂或脱落p43电动机故障p14/M6电动机进油p29转子绕组断路p15/M7轴承受热膨胀p30接线盒接头松动 为清晰、简明地展现诊断推理过程,本文模型以“电动机绕组烧毁”为例进行正反推理,其FFPN的模型如图2所示。由图2可获得该模型的输入、输出矩阵I、O及关联矩阵A。 图2 部分FFPN模型Fig.2 Part FFPN model 4.1 初始值的确定 本文利用文献[16]的方法,辅助于历史数据和专家经验,设定库所初始置信度、权值、变迁可信度和阈值。 库所初始置信度:α0=(0.8,0.6,0.9,0.92,0.7,0.9,0.62,0.82,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0.91,0,0)T。 库所事件的权值:Ω=(1.0,1.0,0.4,0.6,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0)T。 变迁阈值均设为0.5。 变迁规则可信度: U=diag(0.8,0.88,0.92,0.87,0.8,0.9,0.89,0.92,0.89,0.9,0.9,0.89,0.93,0.84,0.9,0.91,0.88,0.91,0.92,0.6,0.8,0.88,0.94,0.92,0.6,0.9)。 将α0、O、U、I带入式(1)求出,推理计算得到 α1=(0.8,0.6,0.9,0.92,0.7,0.9,0.62,0.82,0.64,0.718,0.783,0.736,0.63,0.8,0.73,0,0,0,0,0.72,0,0,0.91,0,0.546)T α2=(0.8,0.6,0.9,0.92,0.7,0.9,0.62,0.82,0.64,0.718,0.783,0.736,0.63,0.8,0.73,0.7,0.68,0.53,0.72,0.73,0.664,0,0.91,0,0.546)T α3=(0.8,0.6,0.9,0.92,0.7,0.9,0.62,0.82,0.64,0.718,0.783,0.736,0.63,0.8,0.73,0.7,0.68,0.53,0.72,0.73,0.664,0.66,0.91,0.686,0.546)T α4=(0.8,0.6,0.9,0.92,0.7,0.9,0.62,0.82,0.64,0.718,0.783,0.736,0.63,0.8,0.73,0.7,0.68,0.53,0.72,0.73,0.664,0.66,0.91,0.686,0.617)T α5=α4推理结束,获得各库所事件的置信度。以此作为正反推理的库所置信度数据。 4.2 正向推理 电动机运行时,若没有故障发生,但通过监测或监管人员预测到故障征兆,本文假设在线监测到如下故障征兆:“转子绕组短路”、 “某相绕组电阻变小”、“轴封环结构损坏”及“油封材料过热”时,其初始标识矢量M0=(0,1,1,0,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0)T。 将α3带入式(3)、式(4)得到变迁预使能矢量y=(1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1)T。 将初始数据和y相应地带入式(5)进行推理演绎,得到点火矢量及每次点火后的库所标识矢量 Y1=(0,1,1,1,0,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0)T M1=(0,1,1,0,1,1,0,0,1,1,1,0,1,1,0,0,0,0,0,0,0,0,0,0,0)T Y2=(0,0,0,0,0,0,0,0,0,1,1,1,0,1,1,1,0,0,0,0,0,0,0,0,0,0)T M2=(0,1,1,0,1,1,0,0,1,1,1,0,1,1,0,1,0,1,1,1,0,0,0,0,0)T Y3=(0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,1,1,1,0,0,0)T M3=(0,1,1,0,1,1,0,0,1,1,1,0,1,1,0,1,0,1,1,1,0,1,0,1,0)T Y4=(0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1)T M4=(0,1,1,0,1,1,0,0,1,1,1,0,1,1,0,1,0,1,1,1,0,1,0,1,1)T Y5=(0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1)T Y5=Y4推理结束。模型库所最终标识矢量为M4故障,信息预测传播路径如图3所示。从图中可清晰看出p9、p10、p11、p13、p14、p16、p18、p19、p20、p22、p24和p25为故障征兆可能引发的故障,工作人员可根据如图所示的故障预测信息和相应库所的置信度依次、有效地检查相应部件,进而提高电动机运行的可靠性。 图3 正向推理结束token分布Fig.3 Forward reasoning end token distribution 4.3 逆向推理 图4 逆向推理结束token分布Fig.4 Adverse inference end token distribution 采用文献[12]的方法求解最小割集,得到引发p12故障的最小割集为G1={p1},G2={p2},G3={p2p3},G4={p3},G5={p5},G6={p6},G7={p7}。根据式(7)得到f(G1)=0.8,f(G2)=0.6,f(G3)=0.75,f(G4)=0.9,f(G5)=0.7,f(G6)=0.9,f(G7)=0.62。最小割集置信度发生率如图5所示。由图可知,G4和G6的故障发生率最高,应先诊断G4和G6故障源,如果G4和G6未发生故障,则按优先顺序依次诊断G1、G3、G5、G7和G2。逆向推理可为故障诊断提供依据,改变传统故障诊断过程中的复杂性和不确定性,提高诊断的效率。 图5 最小割集故障发生率Fig.5 Minimum cut set failure rate 5.1 正向推理对比验证 基于模糊产生式规则表达的最常用故障诊断方法是传统的FTA方法[10]。图6为以 “电动机绕组绝缘烧毁”为例的故障树模型,事件代表的含义如表1所示。 图6 电动机绝缘绕组烧毁的故障树模型Fig.6 Fault tree model of motor winding insulation burned 将第4节的规则置信度μ、权值ω和阈值λ等模糊信息引入故障树。以事件X3与X6为例,由于X2与X3共同由变迁t3作用于库所p10,设故障树事件X2=0.6、X3=0.9、X6=0.9、ω31=0.4、ω32=0.6、ω4=1,根据定义1,求得X2ω31+X3ω32=0.78>0.5,X3ω4=0.9>0.5,则M2=0.78×0.92=0.718,M3=0.9×0.87=0.783,同理,求得M8=M3×0.89=0.697。注意求M8时,依据模糊产生式规则的析取式原则,由M3求得M8,而不是M2。依据前面方法算得M6=X6×0.89=0.801,Mb=M6×0.9=0.72,Mc=M6×0.91=0.73,Me=Mc×0.94=0.686,再依据析取式原则求得T1=Mb×0.92=0.66,T2=Me×0.9=0.617。这与本文正向推理结果相同,验证了FFPN正向推理的正确性。 5.2 逆向推理统计与对比验证 本文用某煤矿2005~2012年期间记录的隔爆型异步电动机维修记录数据,进行统计处理后验证反向推理的正确性,并应用文献[17,18]中两种不同的故障诊断模型对电动机进行故障分析,来对比验证反向推理的准确性。整理“电动机绕组绝缘烧毁”的记录数据共447次,如表2所示。整理表2中故障数据得到具体原因,如表3所示。 表2 故障相关数据记录表 表3 故障记录相关数据 依据上述两组数据可求得其相关性系数,研究二者的相关性来验证反向推理。 由于时间跨度较长,客观原因造成许多记录数据的不清晰与丢失,造成“其他”故障原因次数过多,本文力求实际数据的准确性,将其统计在内。 进一步应用文献[17,18]的故障诊断方法来验证本文方法的准确性。本文选取现场2个故障案例,应用3种方法进行分析,验证结果如表4所示。 表4 与其他方法诊断结果的比较 本文提出将FFPN理论应用于电动机故障诊断。建立了电动机故障的Petri网模型,应用矩阵推理算法推导故障库所token信息的转移,由于矩阵计算速度快,可很好地解决诊断的速度和效率问题,并以Petri网图形方式显示事件之间直观、明了的关系。正向演绎算法使工作人员快速、有效地对预发故障进行评价;逆向演绎结合最小割集理论有效避免了故障诊断的盲目性。进一步完善相关理论数据、调整模糊故障Petri网模型及将其进行软件仿真是本文下一步研究的方向。 [1] 赵妍,李志民,李天云.一种基于谱峭度的异步电机故障诊断方法[J].电工技术学报,2014,29(5):189-196. Zhao Yan,Li Zhimin,Li Tianyun.A method for fault diagnosis of induction motors based on spectral kurtosis[J].Transactions of China Electrotechnical Society,2014,29(5):189-196. [2] 曾庆峰,何正友,杨健维.基于有色Petri网的电力系统故障诊断模型研究[J].电力系统保护与控制,2010,38(14):5-11,127. Zeng Qingfeng,He Zhengyou,Yang Jianwei.Fault diagnosis model of electric power systems based on colored Petri net[J].Power System Protection and Control,2010,38(14):5-11,127. [3] Adamyan A,He D.System failure analysis through counters of Petri net models[J].Quality and Reliability Engineering International,2004,20(4):317-335. [4] Loony C G.Fuzzy Petri net for rule-based decision making[J].IEEE Transactions on Systems,Man and Cybernetics,1988,18(1):178-183. [5] 李厦,乌建中.模糊Petri网在液压同步提升系统故障诊断中的应用[J].中国工程机械学报,2006,4(1):68-71. Li Sha,Wu Jianzhong.Application of fuzzy Petri nets in hydraulic synchronizing system fault diagnosis[J].Chinese Journal of Construction Machinery,2006,4(1):68-71. [6] 盛晟,肖明清,赵亮亮,等.故障Petri网的激发矩阵方法研究[J].仪器仪表学报,2013,34(1):187-192. Sheng Sheng,Xiao Mingqing,Zhao Liangliang,et al.Research on fire matrix method for fault Petri net[J].Chinese Journal of Scientific Instrument,2013,34(1):187-192. [7] 黄敏,林啸,侯志文.模糊故障Petri网建模方法及其应用[J].中南大学学报(自然科学版),2013,44(1):208-215. Huang Min,Lin Xiao,Hou Zhiwen.Modeling method of fuzzy fault Petri nets and its application[J].Journal of Central South University (Science and Technology),2013,44(1):208-215. [8] Motameni H,Ghassempouri T.Transforming fuzzy communication diagram to fuzzy Petri net[J].American Journal of Scientific Research,2011,16:63-74. [9] 梁光夏.基于改进模糊故障Petri网的复杂机电系统故障状态评价与诊断技术研究[D].南京:南京理工大学,2014. [10]马敏,黄建国,夏侯士戟.基于自适应模糊Petri网的雷达故障诊断方法研究[J].仪器仪表学报,2008,29(2):261-265. Ma Min,Huang Jianguo,Xiahou Shiji.Rader fault diagnosis with the adaptive fuzzy Petrinet[J].Chinese Journal of Scientific Instrument,2008,29(2):261-265. [11]杨健维.基于模糊Petri网的电网故障诊断方法研究[D].成都:西南交通大学.2011. [12]原菊梅.复杂系统可靠性Petri网建模及其智能分析方法[M].北京:国防工业出版社,2011. [13]李厦.基于Petri网的故障诊断技术研究及其在液压系统中的应用[D].上海:同济大学,2006. [14]付阶辉.基于Petri网的故障诊断方法研究[D].南京:东南大学,2004. [15]刘曼兰,于海芳,崔淑梅.一种永磁直流电机故障诊断方法[J].电工技术学报,2007,22(10):42-48. Liu Manlan,Yu Haifang,Cui Shumei.An universal approach to diagnose the failures of permanent-magnetic DC motors[J].Transactions of China Electrotechnical Society,2007,22(10):42-48. [16]谢倩,乐晓波,周恺卿,等.模糊Petri网库所集中token初始值的确定方法[J].计算机工程与应用,2012,48(12):49-52. Xie Qian,Yue Xiaobo,Zhou Kaiqing,et al.Determination of token in initial place of fuzzy Petri nets[J].Computer Engineering and Application,2012,48(12):49-52. [17]Renganathan K,Bhaskar V C.An observer based approach for achieving fault diagnosis and fault tolerant control of systems modeled as hybrid Petri nets[J].ISA Transactions,2011,50 (3):443-453. [18]陈理渊,黄进.电机故障诊断的多传感器数据融合方法[J].电力系统及其自动化学报,2005,17(1):48-52. Chen Liyuan,Huang Jin.Motor fault diagnosis with multi-sensor data fusion[J].Proceedings of the CSU-EPSA,2005,17(1):48-52. An Approach for Three-Phase Asynchronous Motor Failure Analysis Based on Fuzzy Fault Petri Net ChengXuezhen1,2WangCheng1,2YuYongjin1,2YiLifeng2ChenQiang1,2 (1.State Key Laboratory of Mining Disaster Prevention and Control Co-founded by Shandong Province and the Ministry of Science and Technology Shandong University of Science and Technology Qingdao 266590 China 2.College of Electrical Engineering and Automation Shandong University of Science and Technology Qingdao 266590 China) In order to improve the stability of three-phase asynchronous motors,the fuzzy fault Petri net theory is used for motors’ state evaluation and fault diagnosis.According to the logic of motor failure,combined with the Petri net modeling method,the fuzzy fault Petri net model of motors is established.The enable transition firing matrix is proposed,combined with the MYCIN confidence matrix method,an accurate assessment of the state of the running motor is achieved.The reverse inference algorithm is the troubleshooting process,and a more concise full matrix reasoning algorithm is then proposed,which improves the diagnosis speed greatly.Using the minimum cut set theory for the priority diagnosis can avoid the blindness of diagnosis.Finally,the part fault model of the motor is used to deduce and analyze.With the help of the fault tree theory,the data of statistics,and method comparison,the validity and rationality of the model are verified. Fuzzy fault Petri net,three-phase asynchronous motor,state evaluation and fault diagnosis,matrix reasoning,minimal cut set 国家自然科学基金重点项目(U1261205)、中国博士后科学基金(2014M51934)和山东省大型科学仪器设备升级改造项目(2013SJGZ05)资助。 2014-12-08 改稿日期2015-06-15 TM343 程学珍 女,1964年生,教授,博士生导师,研究方向为检测技术及新型传感器。(通信作者) 王 程 男,1990年生,硕士研究生,研究方向为电力系统故障诊断。

3 电动机FFPN模型的建立


4 基于FFPN的电动机故障分析





5 正反推理验证



6 结论
猜你喜欢
小型微型计算机系统(2022年4期)2022-05-09
核科学与工程(2021年4期)2022-01-12
实验室研究与探索(2020年11期)2020-12-11
中国粮食经济(2018年12期)2018-12-30
中国粮食经济(2018年10期)2018-12-30
中国粮食经济(2018年11期)2018-12-27
计算机应用(2018年5期)2018-07-25
人大建设(2017年6期)2017-09-26
轴承(2015年2期)2015-07-25
天津科技大学学报(2014年4期)2014-02-27