
永磁同步电动机矢量控制研究
2015-02-18 01:29李星星邓福军
大连交通大学学报 2015年4期
李星星,邓福军
(大连交通大学 电气信息学院,辽宁 大连 116028)*
0 引言
永磁同步电动机(PMSM)具有结构简单、运行可靠、体积小、质量轻、效率高等优点,广泛的应用与航空航天、国防、工农业生产和日常生活的各个领域[1].先进自动控制理论与PMSM结合组成的电机控制系统广泛的应用于高精度、快速响应的场合.本文针对凸极式永磁电动机的Ld≠Lq的特性,研究了矢量控制下的最大转矩电流比控制,即在相同电流下可输出最大转矩的控制方法.文献[2]通过求解高次方程组推导出电磁转矩与d、q轴电流线性关系,通过线性控制实现最大转矩电流比控制,高次方程组求解过程复杂并且占用大量的运算空间.文献[3]通过反馈思想来求解高次方程组,实际运用中用查表实现控制,同样运算过程复杂.为便于工程实践,本文给出改进的工程求解方法,采用改进的曲线拟合方法求解误差最小的电磁转矩与d、q轴电流关系的关系式.文中对id=0控制、最大转矩电流比控制及其近似算法进行比较,仿真结果表明:该方法可有效提高系统的动态性能,具有很好的工程应用性.
1 PMSM数学模型
PMSM在d-q坐标系下的数学模型为:

转矩方程为:

式中:Ud,Uq分别为 d,q轴电压;Id,Iq分别为 d,q轴电流;Ld,Lq分别为d,q轴电感;Rs为定子电阻;ψf为永磁体磁链;ω为转子电角速度;Te为电磁转矩;np为电机极对数;p为微分算子.
由式(2)可以看出,PMSM的输出转矩只取决于d轴电流分量和q轴电流分量,改变Id,Iq的数值可以实现对转矩的控制.电磁转矩前一部分称为永磁转矩,后一部分称为磁阻转矩.电机一般采用id=0的控制方法,但是这种方法忽略了磁阻转矩的作用,使剩余转矩与电流成线性关系,此时电磁转矩方程变为

对于隐极式PMSM而言,Ld和Lq相等,电磁转矩只与Iq有关,常采用此策略进行控制.但对于凸极式PMSM,为充分利用磁阻转矩,常采用最大转矩电流比控制[4-7].
2 最大转矩电流比控制
id=0控制方法对于凸极式永磁电动机而言,在电机输出相同的转矩下,电机的定子电流并不是最小的,因此,采用最大转矩电流比控制方法,使得电机在输出相同情况下电流最小,从而损耗最小.
设永磁同步电动机运转时其定子的三相电流为
式中,iA、iB、iC分别为电机 A、B、C 相定子电流;I为电机定子电流幅值;α为定子电流矢量与A轴的夹角.
将式(4)进行坐标转换,得到电机d-q轴电流如下
进而有

可以看出,最大转矩电流比可转化为如下极值问题
做辅助函数

式中,λ为拉格朗日乘子.
将式(8)分别对Id、Iq和λ求偏导数并令其为零,有
由式(9)可得出:

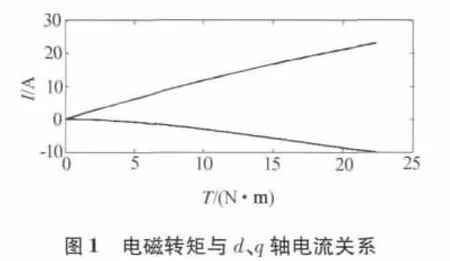
将Id、Iq和Te表示为标幺值,可以得到交、直电流分量与电磁转矩的关系为

式(10)、(11)为永磁电动机运行时电磁转矩与d、q轴电流的表达式.
根据最大转矩电流控制的运算,图1给出了凸极式永磁电动机电磁转矩与d、q轴电流的关系曲线,图2给出电磁转矩与定子电流比值的关系曲线.

3 最大转矩电流比的改进工程近似方法
在实际应用中,需要知道d、q轴电流与电磁转矩的关系式,这样给定参考转矩后,就可以求出MTPA运行时的参考电流,但是要反解出电流与电磁转矩的表达式非常困难.在工程运用中,通常是离线计算出最大转矩电流比不同的电磁转矩对应的电流值,采用查表的方法实现MTPA控制,不过要占用大量存储单元.文献[1]讨论了d、q轴电流与电磁转矩的近似线性关系,但是误差较大;文献[8-9]讨论了运用曲线拟合的方法求解精确的表达式,分别采用3次拟合和5次拟合多项式;文献[10]讨论了参数在线估算进行最大转矩电流比控制.
运用式(10)、(11)直接画出电磁转矩与d、q轴电流的函数曲线,接下来运用Matlab曲线拟合进行选取数据,选取不同次数的多项式进行曲线拟合.文献[8-9]都是对d、q轴电流和电磁转矩进行3次或5次拟合,针对不同的电机参数,曲线拟合的次数不同直接决定了控制方式的精度和误差.本文针对特定的电机参数,由于d、q轴电感参数不一样,因此针对交、直轴电流与电磁转矩的表达式分别进行不同次数的拟合,最后分析计算拟合多项式误差,考虑到拟合次数多直接影响控制器计算能力,设定最小误差值,只要拟合多项式在允许误差值,就采用较小的次数进行拟合.
本文中PMSM 参数设置为Rs=2.875 Ω,Ld=6.5 mH,Lq=10.5 mH,np=3,根据不同次数曲线拟合方法和误差分析,得出适合d、q轴的拟合多项式,具体的表达式为

图3表示适合d、q轴的曲线拟合的关系曲线.

图3 电流Id、Iq与转矩拟合曲线关系
4 仿真结果及分析
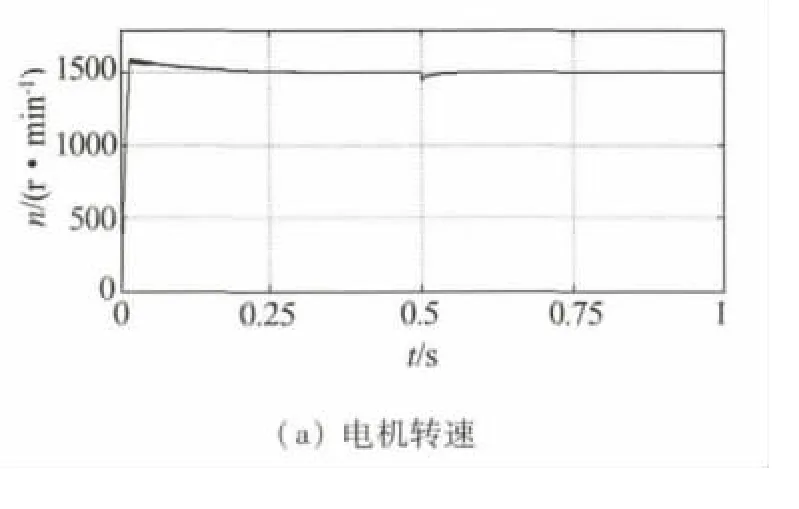
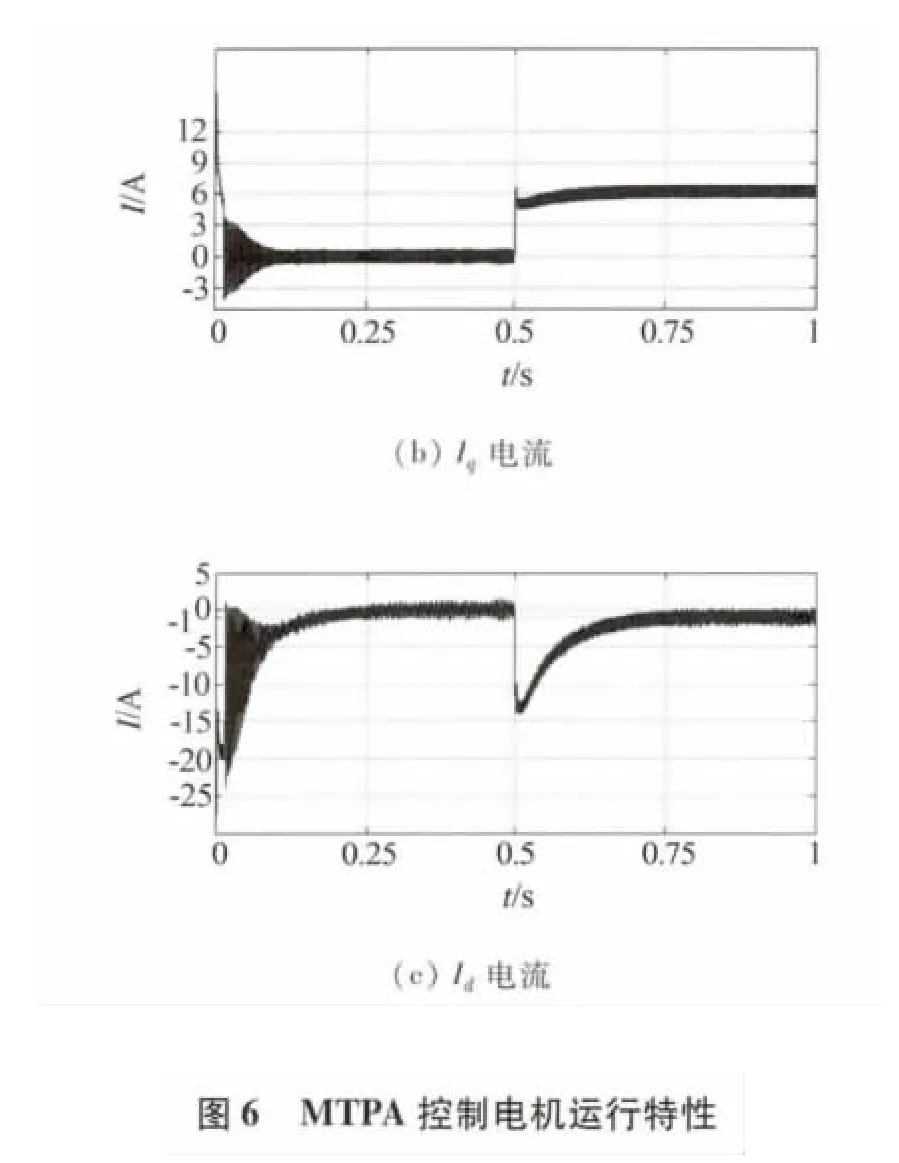
针对上述方法,利用MATLAB/Simulink进行MTPA控制的仿真研究,建立如图4所示的PMSM仿真模型[11-12],并且与id=0控制仿真相比较.初始速度设为0,转速给定为1 500 r/min.仿真时间为1 s,在0.5 s给定负载6 N·m.

图4 MTPA控制矢量控制原理框图
图5给出了采用id=0控制方式的电机运行特性,图6给出采用MTPA控制的电机运行特性.图5(a)和图6(a)为两种控制方案下起动的转速波形,可以看出两者的区别不大,只是采用MTPA控制方式的转速响应快速性比较好.由图5(b)、(c)和图6(b)、(c)可以看出,id=0控制随着负载转矩的增大Id一直不变,无法利用电磁转矩中的磁阻转矩,但是在最大转矩电流比控制下,Id随着负载转矩的增大而反向增大,所以可以有效地利用磁阻转矩,对于相同的负载转矩,id=0控制方式中Iq=8A,而在MTPA控制方式中,电机Iq=6A、Id=-1A,定子电流比前者电流要小,达到应用最小的电流达到转矩的目的,减少了电机损耗.

5 结论
本文对凸极式PMSM矢量控制的MTPA进行研究,讨论总结出适合工程实际的近似方法.MTPA控制相对于id=0控制可以有效的减小电机定子电流,减少损耗,但是算法相对复杂.本文提出的改进曲线拟合方法,把d、q轴电流表达式的误差减小到最小,提高运算精度同时减少运算复杂程度,实现最快最精确的MTPA永磁电动机控制.
[1]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2012:3-9.
[2]李长红,陈明俊,吴小役.PMSM调速系统中最大转矩电流比控制方法的研究[J].中国电机工程学报,2005,21:169-172.
[3]徐佳园.永磁同步电机最大转矩电流比控制[D].北京:北京交通大学,2010:28-35.
[4]连琨,刘艳萍,高美卿.永磁同步电动机矢量控制[J].电机与控制应用,2010,37(12):52-55.
[5]KWANG-WOON LEE,SANG BIN LEE.MTPA operating point tracking control scheme for vector controlled PMSM drives[A].Power Electronics Electrical Drives Automation and Motion(SPEEDAM),2010:24-28.
[6]裘君,赵光宙,齐冬莲.基于反馈耗散方法的永磁同步电机最大转矩/电流控制[J].煤炭学报,2009,34(9):1285-1290.
[7]吉智,何凤有.凸极永磁同步电机电流控制方法研究[J].电气传动,2011,41(7):2-7.
[8]郎宝华,刘卫国,贺虎成,等.基于最大转矩电流比动态磁链给定的直接转矩控制[J].电气传动,2008,38(1):24-26.
[9]黄鹏,苗长云,黄雷,等.参数在线估算的永磁同步电机最大转矩电流比控制[J].煤炭学报,2011,36(1):172-176.
[10]田以涛,王英.基于最大转矩电流比的永磁同步电动机矢量控制[J].电机与控制应用,2013,40(5):25-28.
[11]基于MATLAB的永磁同步电机矢量控制系统[J].上海电力学院学报,2013,29(3):213-217.
[12]袁喻华,王莉.永磁同步电机矢量控制MATLAB仿真研究[J].变频器世界,2011(4):68-72.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
气象学报(2021年2期)2021-05-13
防爆电机(2021年1期)2021-03-29
现代计算机(2020年31期)2020-12-28
防爆电机(2020年6期)2020-12-14
数学大世界(2020年2期)2020-03-07
测控技术(2018年2期)2018-12-09
价值工程(2017年31期)2018-01-17
电力工程技术(2014年1期)2014-03-20
