
基于驾驶模拟器的驾驶人制动后制动踏板操作行为分析
2014-12-14 06:02王雪松游世凯
交通信息与安全 2014年5期
王雪松 游世凯 陈 铭
(同济大学道路与交通工程教育部重点实验室 上海 201804)
0 引言
交通事故中追尾事故所占比例最高。在国外,追尾事故占所有事故比例的25%~40%[1-2]。在上海,追尾事故大约占事故总数的20%,而在高速公路和隧道中,追尾事故的比例分别为49%和67%[3]。导致这类事故发生的主要原因有2个:①驾驶人高估了车头时距以致没有及时作出反应;②驾驶人没有采取有效避撞措施。研究驾驶人的避撞行为对于理解驾驶人的避撞行为、建立制动模型曲线、避撞预警算法等有着重要作用[4-5]。
驾驶人制动避撞方式可以分为2个阶段:驾驶人制动前反应过程和制动后的减速过程。制动前反应过程主要通过3个指标进行测量:制动反应时间(从前车开始减速到本车完全释放油门踏板的时间)、转移时间(从完全释放油门踏板到本车开始踩制动的时间)和总制动反应时间(从前车开始减速到本车开始踩制动的时间)[6]。制动前反应过程受到了驾驶人、车辆、环境条件等诸多因素的影响[7-10]。Sohn和Stepleman[11]的实验发现总反应时间不仅跟驾驶人本身属性有关(美国驾驶人比非美国驾驶人要反应慢),还跟驾驶人是否意识到危险有关(没有意识到危险的驾驶人反应时间会比意识到危险的驾驶人反应时间长)。Rudio-Brown和Parker[12]指出车辆对于驾驶 人反应时间的影响主要与会导致驾驶人分心的行为有关,例如打手机[13]。
制动后避撞行为包括驾驶人的制动程度、制动速率和制动次数。目前,针对该方面的研究大多只是涉及一些相关的指标而没有进一步的深入分析。驾驶模拟器在发达国家被广泛用于涉及驾驶人行为因素的研究。它可以高度逼真的虚拟现实环境,尤其是现实中较为危险的环境,避免了实验对实验人员可能造成的危险,并且可以在可控的实验的状态下采集所有的实验数据[14]。McGehee等[14]用相似的真实试验验证了模拟器实验数据的可靠性,其中比较了2种实验的制动后避撞行为指标——制动至最大制动力度时间,结果表明2种实验中制动至最大制动力度的时间近似。
在现有避撞行为的研究中,较好的分析了驾驶人、车辆、环境条件等诸多因素对于驾驶人制动前反应过程的影响;但是缺少对不同危险程度下驾驶人制动后制动踏板操作行为的研究,而且也未提出足够的指标描述制动后制动踏板操作行为,从而未能很好的分析不同危险情况不同驾驶人的制动后制动踏板操作行为参数的差异。本研究依托配有8自由度运动系统的高仿真驾驶模拟器,研究了30个不同经验的驾驶人在不同前车减速度(0.3,0.5,0.75g)和不同车头时距(1.5,2.5s)的制动后制动踏板操作行为。针对其中140个只采取制动方式避撞的工况,利用ANOVA 模型,分别比较了不同风险程度情况下的驾驶人制动后制动踏板操作行为参数的差异——踩踏板速率、制动至25%制动踏板压力时间、制动至50%制动踏板压力时间和制动至最大制动踏板压力时间。
1 实验
1.1 实验人员
选择30位持有驾照的驾驶人作为被试者,他们的行驶里程都超过了1万km。其中,有4位驾驶人在实验过程中出现轻微不适症状,因此补充了4位驾驶人作为替代者。驾驶人中6位女性,24位男性,平均年龄为32.9岁(年龄标准方差:8.26)。
1.2 实验设备
图1为同济大学驾驶模拟器。该驾驶模拟器的主要特征:驾驶舱为封闭刚性结构,投影系统有5个投影仪内置于驾驶舱,场景投影到球形幕上,水平视角为250°;仿真车辆为Renault Megane III,置于球体中央,去除发动机、保留轮胎,加载其他设备,如转向盘、制动、换档的力反馈系统和数据的输入输出设备,后视镜为3块LCD屏幕;运动系统为8 自由度;控制软件为法国OKTAL公司开发的商业软件SCANeRTM。

图1 同济大学驾驶模拟器Fig.1 Tongji University driving simulator
1.3 实验设计与场景
被试人员根据驾驶里程的长短被分为3组:新手驾驶人(驾驶里程在1万~5万km)、中等经验驾驶人(5 万~10万km)和经验驾驶人(>10万km)。实验使用了2×3×3的实验设计方案,被试间因子为驾驶里程,被试内因子为初始车头时距(1.5,2.5s)和前车减速度(0.3,0.5,0.75g)。针对测试过程中可能存在的驾驶学习效应,实验中将通过随机化方法(pseudo-randomization)[16]来均衡不同工况条件的出现顺序,以控制并最小化学习程度。
正式实验场景选择1条4车道、平原沿海高速公路,天气晴朗、视野良好、对向车流较少。驾驶人首先要求加速到120km/h,并且行驶在内侧车道。约2 min后,1 辆白色前车会切入到模拟器车辆前,并保持在120km/h的速度稳定行驶。此时测试驾驶人需要跟随前车行驶,保持车距在60~80m。在随后的实验过程中,前车会在不同车头时距(1.5,2.5s)以不同前车减速度(0.3,0.5,0.75g)进行6次减速,减速开始的时候前车尾灯会发亮,每次前车会减速到停止。在前车每次减速之前,会首先判断车头时距是否满足触发条件(1.5s或2.5s),如果本车跟车较远,屏幕上会提示“加速”。本车趋于稳定跟随的时候,前车才会触发工况。
1.4 实验流程
实验驾驶人到达实验室之后,首先会在工作人员的辅助下,了解实验基本过程、驾驶任务以及实验中可能所涉及到的安全因素,填写实验知情同意书和关于模拟器使用情况的调查问卷。
模拟器实验分为试驾和正式跟车实验2个部分。试驾场景采用城市道路数据库,场景中加入适当社会车辆提高真实度。试驾环节主要目的是帮助测试人员在短时间内熟悉模拟器的驾驶操作,整个试驾过程长约7min。此外,试驾场景中包含跟车练习和制动练习2个部分。在跟车练习中,驾驶人要求以80km/h的速度跟随前方红色车辆。跟车过程中,屏幕上方将显示驾驶人当前跟车距离,驾驶人可以根据需要不断改变与前车的距离,以熟悉在模拟器中对前车距离的感知。在试驾环节末端,驾驶人被要求在长约2km 的直线路段执行制动练习。练习过程中,驾驶人首先被要求加速至100km/h,并尝试保持该车速。直至看到前方停止的轻型货车,驾驶人需要按照其正常驾驶的习惯,将车辆安全,平稳地停止在前车后方。完成后,需再重复操作1次以保证数据的有效性(此部分制动练习将作为不同驾驶人正常制动制动的基准),并且只有当驾驶人成功将车辆停在前车后方1~2 m 范围内,才认为驾驶人已经熟悉车辆操作。
在完成试驾过程之后,驾驶人会有5 min的休息时间,如果驾驶人没有异常反应,则开始正式实验。在正式试验过程,驾驶模拟器以20 Hz的速率记录以下数据:踩踏板速率、制动至25%制动踏板压力时间、制动至50%制动踏板压力时间和制动至最大制动踏板压力时间。实验结束之后填写对模拟器使用情况评价问卷,包括2个部分,1部分是对驾驶模拟器的模拟真实度进行评价,另1部份是Kennedy设计8项驾驶模拟器眩晕测试表[17]。
2 实验结果与讨论
驾驶人避撞的方式主要有3种:只制动、只变道、制动且变道。针对驾驶人只踩制动的方式进行研究,共有140 个工况,其中发生39 起事故。在制动过程中,驾驶人有可能不止1次的制动,第1次制动主要是驾驶人根据制动前的情况进行综合判断的结果,后面的制动是驾驶人根据制动过程中的实时情况进行调整,笔者所研究的是驾驶人第1次制动过程的制动踏板操作行为。工况发生后,驾驶人更多的是根据制动时的车头时距而不是工况促发时的车头时距来确定制动程度的,这里采用开始制动时的车头时距对制动后行为进行分类。
从获得的开始制动时的车头时距分布看出,约31.4%的车头时距在<0.8s,39.3%的车头时距分布在[0.8,1.2s),29.3%的车头时距分布在>1.2s,从而将车头时距分为3 类进行分析:S(<0.8s),M([0.8s,1.2s)),L(>1.2s)。由于驾驶人采取只制动避撞方式的工况没有原始实验分组那么均衡,样本量不均衡。利用ANOVA进行分析,并采用TYPEⅢ方法检验变量的显著性。此外,利用Tukey Comparisons方法检验不同风险程度下制动后制动踏板操作行为参数的差异。
2.1 踩踏板速率
踩踏板速率(vBrake)指本次制动过程中,制动踏板压力最大值与制动之最大制动踏板压力时间的比值。图2为不同危险程度下的踩踏板速率的均值。
从制动时车头时距来看,随着制动时车头时距的减少,vBrake逐渐增大。Turkey’s HSD 检验表明制动时车头时距为M比L情况下vBrake要显著大91.03N/s(p<0.05),S的要比M情况下显著大90.09N/s(p<0.05)。从前车减速度来看,随着前车减速度的增大,vBrake也逐渐增大。Turkey’s HSD 检验表明0.75g比0.3g的情况下显著大于129.96N/s(p<0.05)。
ANOVA 分析结果表明,制动时车头时距(F(2,135)=14.63,p<0.000 1)和前车减速度(F(2,135)=7.84,p=0.006)对vBrake的影响是显著的。
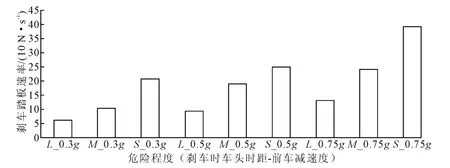
图2 不同危险程度下制动踏板速率均值分布Fig.2 Brake pedal rate under different braking headways and LV decelerations
图3 反映了不同经验驾驶人vBrake的分布。新手驾驶人的vBrake是最大的,为242.3N/s。相比于新手驾驶人,经验驾驶人和中等经验驾驶人的vBrake分别少36.5%和46.5%。这可能是因为新手驾驶人因为驾驶经验不足,面对危险情况,多数会采取较大的制动速率,而中等经验驾驶人和经验驾驶人操作水平较高,会根据具体危险等级,选择合适的制动速率。

图3 不同经验驾驶人制动踏板速率均值分布Fig.3 Brake pedal rate under different driving experiences
在ANOVO 模型中通过控制车头时距和前车减速度的主效应(main effect),测试不同驾驶经验群体间vBrake的差异。ANOVO 结果表明,制动时车头时距(F(2,133)=13.78,p<0.0001)、前车减速度(F(2,133)=8.26,p=0.004)和驾驶经验(F(2,133)=5.85,p=0.0037)对vBrake的影响是显著的。Turkey’s HSD 检验表明经验驾驶人比新手驾驶人的vBrake显著小88.34N/s(p<0.05),中等经验驾驶人比新手驾驶人的vBrake显著小112.83N/s(p<0.05)。
2.2 制动至25%,50%,最大制动踏板压力时间
制动至25%制动踏板压力时间(BT25%)指在此次制动过程中,从本车开始制动到本车制动到车辆理论最大制动踏板压力值(250N)的25%的时间,如果此次制动过程制动踏板压力值没有达到62.5N,则缺省;制动至50%制动踏板压力时间(BT50%)指在此次制动过程中,从本车开始制动到本车制动到车辆理论最大制动踏板压力值(250N)的50%的时间,如果此次制动过程制动踏板压力值没有达到125N,则缺省;制动至最大制动踏板压力时间(BTmax)指在此次制动过程中,从本车开始制动到本车制动最大制动踏板压力值的时间。
图4展示了不同危险程度下,BT25%,BT50%,BTmax的均值的变化。随着制动时车头时距的减少,BT25%和BT50%也随之减少,而BTmax除了制动时车头时距为M、前车减速度为0.5g的情况以外,基本也随之减少。但是随着前车减速度的改变,这3 个指标并没有显著规律。此外,从ANOVA 分析结果也可以看出,相比于前车减速度,制动时车头时距对这3个指标影响更加显著。说明驾驶人更多的是根据驾驶人制动时的车头时距不是前车减速度去判断危险等级,从而决定第1次制动程度。相对于前车速度的改变,驾驶人对车头时距的变化更加敏感。在设计追尾避撞系统的时候,更加要注意驾驶人没有意识到前车减速的情形。
ANOVA 分析结果表明,制动时车头时距(F(2,135)=11.06,p<0.000 1)和前车减速度(F(2,118)=7.07,p=0.001 2)对BT25%的影响都是显著的;制动时车头时距(F(2,135)=11.95,p<0.000 1)和前车减速度(F(2,118)=6.94,p=0.001 5)对BT50%的影响都是显著的;制动时车头时距(F(2,135)=8.25,p=0.000 4)对BTmax的影响是显著的。
2.3 问卷分析
驾驶人问卷调查包括2 个部分,1 个是对驾驶模拟器的模拟真实度进行评价,另1个是Kennedy设计8 项驾驶模拟器眩晕测试表。对驾驶模拟器模拟真实度的调查问卷包含对车辆操作系统、运动系统、图像显示系统、3D 建模逼真度、声音逼真度五项内容,结果表明,平均超过70%的驾驶人认为驾驶模拟器能够真实的模拟显示情况。驾驶模拟器眩晕测试表将每种情况分为4个等级:无-0、轻微-1、中等-2、严重-3,调查问卷结果表明,超过75%的测试人员在实验后选择了等级无或者轻微。总的来说,模拟器的操作环境对大部分驾驶员影响较小,对实验结果影响较小,实验数据真实可靠。

图4 不同危险程度的制动时间均值分布Fig.4 Time to Brake under different braking headways and LV decelerations
3 结束语
研究利用同济大学8自由度运动系统的高仿真驾驶模拟器研究了驾驶人制动后制动踏板操作行为。在驾驶模拟器环境下建立了不同前车减速度(0.3,0.5,0.75g)和不同初始车头时距(1.5,2.5s)的工况,运用第1次制动过程中的踩踏板速率、制动至25%制动踏板压力时间、制动至50%制动踏板压力时间和制动至最大制动踏板压力时间4个指标比较了不同风险程度、不同驾驶人的制动后制动踏板操作行为差异。
实验结果表明踩踏板速率不仅仅受到制动时车头时距、前车减速度的影响,同时驾驶经验也会产生影响,它可以很好的反应不同驾驶人在不同危险程度的避撞行为的差异。工况风险等级越高,驾驶人的平均踩踏板速率越大;相比于经验驾驶人和中等经验驾驶人,新手驾驶人会因为驾驶经验不足,选择采取更大制动踏板速率。相比于前车减速度,制动时车头时距对制动至25%制动踏板压力的时间、制动至50%制动踏板压力的时间和制动至最大踏板压力的时间显著影响。驾驶人会随着制动时车头时距的提高而更快的达到最大制动力度。此外,相比于前车速度的改变,驾驶人对制动时车头时距的变化更加敏感。文中没有尝试利用这3个指标建立避撞预警算法,也没有分析驾驶员控制方向避撞行为,此方面的研究还有待深入。
[1]Gilling S P.Collision avoidance,driver support and safety intervention system[J].Jounnal of Navigation,1997,50(1):27-32.
[2]Mcknight A J,Shinar D,Reizes A.The effect of the center high-mounted stop lamp on vans and trucks[R].United States:National Public Services Research Institute,1989.
[3]Wang X,Chen X,Deng B.Shanghai 2020driving scenario models and traffic accident models development[R].Shanghai:General Motors China Science Lab,2011.
[4]宋晓琳,冯广刚,杨济匡.汽车主动避撞系统的发展现状及趋势[J].汽车工程,2008,30(4):285-290.Song Xiaoling,Feng Guanggang,Yang Jikuang.The current state and trends of automotive active collision-avoidance system[J].Automotive Engineering,2008,30(4):285-290.(in Chinese).
[5]Brown T L,Lee J D,McGehee D V.Human performance models and rear-end collision avoidance algorithms[J].Human Factors:The Journal of the Human Factors and Ergonomics Society,2011,43(3):462-482.
[6]Liebermann D G.A field study on braking responses during driving.i.triggering and modulation[J].Ergonomics,1995,38(9):1894-1902.
[7]Young M S,Stanton N A.Back to the future:brake reaction times for manual and automated vehicles[J].Ergonomics,2007,50(1):46-58.
[8]敬 明,邓 卫,刘志明,等.基于车辆个体特征的IDM 模型研究[J].交通信息与安全,2012,30(5):10-13.Jing Ming,Deng Wei,Liu Zhiming,et al.IDM model based on individual features[J].Journal of Transport Information and Safety,2012,30(5):10-13.(in Chinese).
[9]张良力,吴超仲,黄 珍,等.面向安全预警的机动车驾驶意图研究现状与展望[J].交通信息与安全,2012,30(3):87-92.Zhang Liangli,Wu Chaozhong,Huang Zhen,et al.Research on driver’s intention for traffic safety pre-caution[J].Journal of Transport Information and Safety,2012,30(3):87-92.(in Chinese).
[10]Chen M,Wang X,Zhang H,et al.Collision avoidance behavior in rear-end collision scenarios:driving simulator study[C]∥Compendium of 92th Transportation Research Board Annual Meeting,Transportation Research Board of the National Academies,Washington D.C:TRB.2013.
[11]Sohn S Y,Stepleman R.Meta-analysis on total braking time[J].Ergonomics,1998,41(8):1129-1140.
[12]Rudin-Brown C M,Parker H A.Behavioural adaptation to adaptive cruise control:implications for preventive strategies[J].Transportation Research Part F:Traffic Psychology and Behaviour,2004(7):59-76.
[13]白 玉,何 熊,龙 力.手机使用对驾驶员行为影响研究综述[J].交通信息与安全,2013,31(3):136-142.Bai Yu,He Xiong,Long Li.Review of researches on impacts of mobile phone use on driving[J].Journal of Transport Information and Safety,2013,31(3):136-142.(in Chinese).
[14]Senders A F.Simulation as a tool in the measurement of human performance[J].Ergonomics,1991.34(8):995-1025.
[15]McGehee D V,Mazzae E N,Baldwin G H S.Driver reaction time in crash avoidance research:validation of a driving simulator study on a test track[C]∥Proceedings of the Human Factors and Ergonomics Society Annual Meeting,Sandiego:SAGE,2000.
[16]Curry R C,Greenberg J A,Kiefer R J.NADS versus CAMP closed-course 19comparison eaminining“last-second”braking and steering maneuvers under various 20 kinematic conditions[R].Washington D.C.:National Highway Traffic Safety Administration,2005.
[17]Kennedy R S,Lane N E,Berbaum K S.Simulator sickness questionnaire:an 12enhanced method for quantifying simulator sickness[J].The International Journal of 13 Aviation Psychology.1993(3):203-220.
猜你喜欢
人类工效学(2021年5期)2022-01-15
军事文摘(2020年24期)2020-02-06
绥化学院学报(2019年10期)2019-10-12
心理科学进展(2018年8期)2018-02-21
中国老区建设(2016年4期)2017-01-15
人民交通(2016年9期)2016-06-01
心理科学进展(2015年5期)2015-02-26
大连交通大学学报(2012年2期)2012-07-02
中学生数理化·高一版(2008年6期)2008-11-15
