
基于碰撞时间的追尾风险分析*
2014-12-14 06:02张文珺杨海飞
交通信息与安全 2014年5期
陆 建 张文珺 杨海飞 姜 军
(1.东南大学城市智能交通江苏省重点实验室 南京 210096;2.现代城市交通技术江苏高校协同创新中心 南京 210096)
0 引言
随着道路交通流密度增大,车辆间距减小,后车跟随所在车道内相邻前车行驶且受前车制约的驾驶行为被称为跟驰行为[1]。车辆在跟驰过程中,表现出制约性、延迟性和传递性[1]。一旦前车制动减速,后车跟驰速度过快或跟驰距离较小而不足以做出及时反应以完成制动措施时,追尾事故便会发生。目前,我国城市道路交通拥堵问题日益严重,车辆在跟驰过程中发生追尾冲突的风险也随之增大。因此,分析车辆的追尾风险,可为辅助驾驶技术的研究提供理论支撑,对促进道路交通安全状况的改善有着重要意义。
近年来,国内外研究学者主要采用基于历史事故数据的回归统计法和非事故数据的理论推导法对追尾事故成因及风险进行分析[2-3],但由于历史事故数据的获取需要采集大量长期事故数据及天气、交通等关联数据,这种方法并不能够广泛适用于我国城市道路追尾风险研究。在以往有关我国城市道路追尾风险的研究中,条件概率的思想及基于自适应网络的模糊推理系统(简称ANFIS)的理论曾被运用于建立追尾风险评估模型,但研究数据大多为借鉴他人成果或通过仿真软件获得,且研究中多未考虑城市道路类型等因素的影响[4-6]。因此,总体而言,我国在城市道路追尾风险分析领域尚存在着数据缺乏且较少从微观层面展开数据分析的问题。针对此研究现状,笔者通过车载实验,观测真实交通环境下专业和非专业驾驶人的跟驰行为特征,获取相应的实测数据,基于碰撞时间参数,建立追尾风险概率模型,研究跟驰行为的追尾风险。
1 碰撞时间
碰撞时间,是最常用的评价交通安全的微观指标,Hayward[7]在其研究中首次提出了碰撞时间TTC(time to collision)的概念,随后大量学者进行了相关研究。碰撞时间是指某一时刻跟随车驾驶人可以利用的通过调整本车速度以避免与引导车碰撞的时间,等于跟驰距离除以相对速度,其计算公式为

式中:D为前后车之间的跟驰距离;vf为跟随车的速度;vl为被跟随车的速度;Δv为后车与前车的速度差(Δv=vf-vl)。
TTC只在跟随车速度大于引导车速度时才有意义,TTC的值越小表示2车发生碰撞的风险越大。当TTC大于20s时,驾驶人有充足的时间对突发情况进行反应并采取避让措施,因此重点对小于20s的TTC进行统计分析。
关于TTC已有大量的研究成果。Katja Vogel[8]对车头时距和TTC这2个常用于安全评价的指标进行了比较,研究表明小的车头时距往往表示潜在的危险状态,而小的TTC值则表示即时的危险状态。TC存在前后车速度相等时无法表示的问题,所以Raymond J.Kiefera 等[9]和Valentina E.Balas 等[10]引入碰撞时间倒数(TTC-1)的概念,TTC-1是速度差的连续函数。TTC-1≤0表示没有碰撞风险,TTC-1>0时,碰撞风险随着TTC-1的增加而增加。此外,国内学者还曾基于TTC进行追尾冲突数的研究[11]。
2 数据采集及处理
本次实验的目的是测量接受测试的驾驶人(专业驾驶人、非专业驾驶人)在城市道路上行驶时的跟驰行为特性参数。以下介绍实验设备、数据采集方法及数据处理过程。
2.1 实验设备
实验设备和实验过程见图1。

图1 实验设备和实验过程Fig.1 Equipments and the experiment process
实验设备主要包括车载激光测速测距一体化系统1套(车载激光测距仪1台、GPS 1个、摄像头1个)和笔记本电脑1台。GPS用以测量实验车实时经纬度坐标,从而确定实验车辆的位置;激光测距仪测量实验车与前车的跟驰距离;摄像头用以记录实验场景和驾驶人驾驶行为;笔记本电脑用以连接GPS和激光测距仪并运行实验数据采集软件。实验过程中,数据在笔记本电脑上动态显示。
2.2 实验对象和实验车辆
实验对象包括16名非专业驾驶人和10名专业驾驶人。目前国内外对专业和非专业驾驶人的划分没有统一的标准,笔者定义驾龄大于7年、累计行程大于10 万km 且近2 年累计行程大于4万km 的驾驶人为专业驾驶人;定义驾龄小于5年或累计行程小于6万km 且近2年内累计行程小于3万km 的驾驶人为非专业驾驶人。受试驾驶人的基本情况见表1。
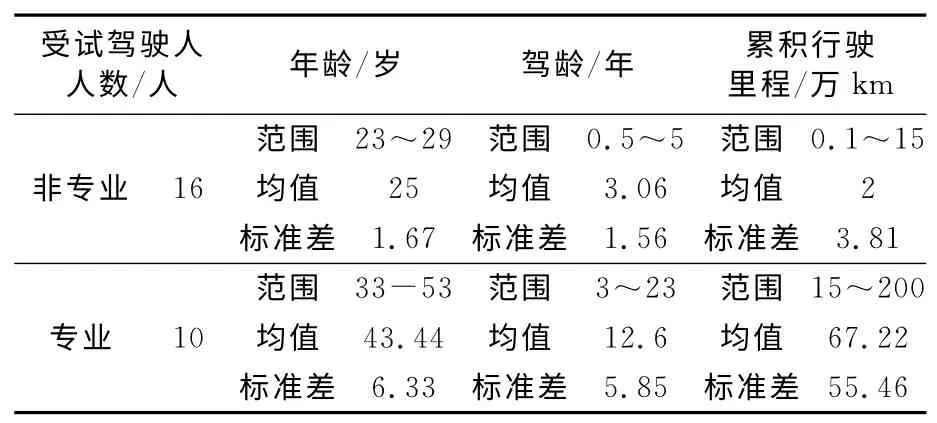
表1 受试驾驶人基本情况Tab.1 Basic information of the tested drivers
实验车为福特福克斯自动挡小汽车,排量为1.8L,车身长度为4.48m,宽度为1.84m,此车型是目前道路上比较常见的车型。
2.3 数据采集和处理
实验在天气状况良好、无大风大雨、光线充足的白天进行,并且实验时间为08:00~11:00时和13:00~18:00时,覆盖平峰和高峰时段。经过实地调查,选取的实验路线为:南京市龙蟠中路(城市快速路)—瑞金路(城市主干道)—御道街(城市次干道)—中山东路(城市主干道)一线,全线长度4km。实验道路路面情况良好、开口较少并且有机非分隔带,车辆行驶受非机动车和行人的干扰较小,并且道路上行驶的车辆以小汽车为主。
实验过程如下:首先,在实验前先对受试驾驶人进行简单培训,说明本次实验的要求、实验路线等,使受试驾驶人对实验有一定的了解,同时让其在实验中尽可能保持平时的驾驶习惯和状态,并且向其说明,实验并不要求在特定的时间到达目的地,进而避免受试驾驶人因感到时间压力而对实验结果产生影响。然后,将准备好的调查问卷交给受试驾驶人填涂,了解驾驶人的基本情况。随后,受试驾驶人驾驶实验车行驶15min习惯实验车后,再正式开始实验数据采集。正式数据采集过程中,每个受试驾驶人在道路上行驶约45 min,所有受试驾驶人在相同的道路上实验,从而消除不同道路条件对实验结果的影响。
激光测距仪采集跟驰前后车之间的距离,采用较高的采样频率20 次/s,即采样时间间隔为0.05s/次,实验车辆的位置信息由GPS采集,采样频率为1次/s。去除无效数据,实验中每秒钟有约2 500条数据被采集。实验后,对获得的原始数据进行处理,包括:剔除丢失或错误数据(本文使用局部加权拟合法对前车的轨迹数据进行处理,并建立数据筛选原则进行人工筛选,以获得前车准确、平滑的行驶轨迹。筛选考虑了合理的前车轨迹数据应符合:第一,前车轨迹数据应为非严格单调递增函数,因为正常行驶中车辆不可能倒退;第二,前车轨迹数据应符合交通情况和车辆的物理极限,本文实验车辆为普通小汽车,根据车辆的加/减速能力将加速度<-5m/s2和加速度>10m/s2的轨迹数据为无效数据,不满足上述条件的轨迹数据需要被剔除。)、将GPS和激光测距仪的有效数据相匹配、计算跟驰行为的特性指标(跟驰车的速度、加速度,时间间隔,速度差以及前车速度等)。
3 数据分析
根据实验实测获取的有效数据,研究跟驰行为中的不同道路上各类驾驶人的碰撞时间,统计碰撞时间频率分布进而确定碰撞时间的分布函数,并结合安全跟驰状态的碰撞时间标准[12],建立追尾风险概率模型。
3.1 碰撞时间统计值
碰撞时间的统计描述见表2,去除奇异值和极端值后得到稳定跟驰状态下碰撞时间的箱图(见图2)。主干道上非专业和专业驾驶人的TTC均值分别为7.88s和7s,非专业驾驶人的TTC均值比专业驾驶人大0.88s,大12.6%;快速路上分别为8.3s和7.03s,非专业驾驶人的TTC均值比专业驾驶人大1.27,大18.1%。主干道和快速路上非专业驾驶人的TTC均值都大于专业驾驶人,但是t检验表明两者均值无显著差异(主干道上p=0.215、快速路上p=0.144);另外,驾驶人在快速路上的TTC均值都大于主干道上的TTC均值,但是t检验表明两者均值无显著差异(非专业驾驶人p=0.617、专业驾驶人p=0.932)。主干道和快速路上非专业驾驶人的TTC分布范围都大于专业驾驶人。
3.2 碰撞时间频率与分布函数
主干道和快速路上驾驶人碰撞时间(TTC)的频率分布分别见图3和图4,主干道和快速路上的TTC频率表现出相同的趋势,即专业驾驶人选择较小TTC的频率大于非专业驾驶人,而选择较大TTC的频率小于非专业驾驶人。说明专业驾驶人倾向于选择较小的TTC,而非专业驾驶人倾向于选择较大的TTC。因为专业驾驶人驾驶经验更为丰富、驾驶技术更为熟练、心理素质更加稳定,认为行驶时能够较好地掌控自己的驾驶状态和应对外部环境条件的变化,所以更具有冒险意愿而选择较小的碰撞时间,而非专业驾驶人由于驾驶经验不足、驾驶技术不熟练、行驶时更加紧张,所以行驶时会更加保守地选择较大的碰撞时间以保障行车安全。但是值得注意的是,快速路上非专业驾驶人选择的TTC在0~2s范围内的频率大于专业驾驶人。TTC在0~2s范围内表示较大的碰撞风险,说明在快速路上非专业驾驶人可能面对更加直接的、严重的碰撞风险。
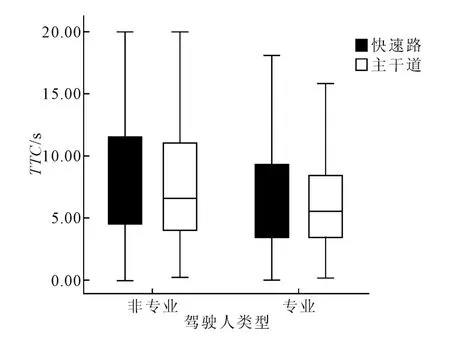
图2 碰撞时间的箱图Fig.2 Box plots of TTC
观察TTC频率分布总体上类似于Gamma分布或对数正态分布。由于数据点样本量较大(见表2),所以对碰撞时间数据点进行简单随机抽样,每次随机抽取100 个样本,重复抽样500次。对每次随机抽取的样本数据点进行拟合和检验,将所有抽样得到的参数平均值作为总体的拟合参数,同时计算参数的标准差和变异系数,得到稳定跟驰状态下碰撞时间分布函数的拟合参数见表3。
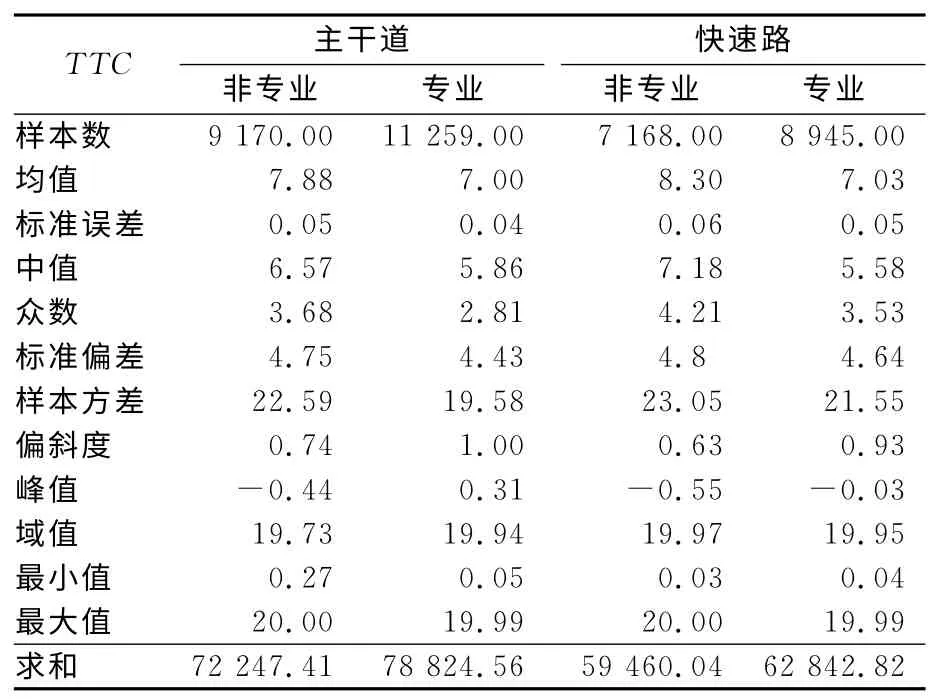
表2 碰撞时间的统计描述Tab.2 Statistical description of TTC

图3 碰撞时间频率图(主干道)Fig.3 Frequency distribution of TTC(Arterial)

图4 碰撞时间频率图(快速路)Fig.4 Frequency distribution of TTC(Urban Expressway)

表3 碰撞时间分布函数的拟合参数Tab.3 Fitting parameters of TTC distribution function
拟合的对数正态分布估计参数的变异系数都小于Gamma分布估计参数的变异系数,对数正态分布更加符合碰撞时间的分布。碰撞时间实测数据的分布频率和拟合函数计算得到理论频率的比较见图3和图4,对数正态分布函数与实测数据的匹配效果很好,主干道上非专业和专业驾驶人碰撞时间服从lnN(1.865,0.657)和lnN(1.738,0.677)的对数正态分布,密度函数为别为f(TTC)=和快速路上非专业和专业驾驶人碰撞时间服从lnN(1.920,0.671)和lnN(1.713,0.749)的对数正态分布,密度函数分别为
3.3 追尾风险概率
Li[12]分析了判断驾驶人的跟驰行为是否安全的碰撞时间TTC标准(见式(2)、(3)),当碰撞时间TTC大于该标准时,跟驰是安全的,否则为不安全的。当行驶速度和前后车速度差相等时,非专业驾驶人的碰撞时间标准约为专业驾驶人的1.2倍。
非专业驾驶人:

专业驾驶人:

为了更准确地表征驾驶人跟驰行为的安全性,结合安全跟驰状态的碰撞时间TTC标准和以上提出的驾驶人碰撞时间TTC的分布函数,采用概率的形式来表示驾驶人跟驰过程中可能发生追尾事故的风险。提出追尾风险概率模型为:
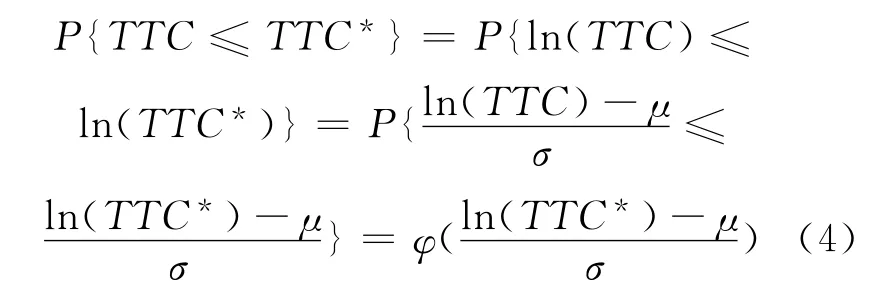
式中:TTC为实际的碰撞时间值,s;TTC*为安全跟驰状态的碰撞时间标准,s。
利用安全跟驰状态的碰撞时间标准(见式(2)、(3)),计算得到主干道和快速路上不同速度和速度差下的安全跟驰状态TTC标准分别见表4和表5。
基于以上建立的追尾风险概率模型计算得到主干道和快速路上不同速度和速度差下的追尾风险概率分别见表6、表7和表8。
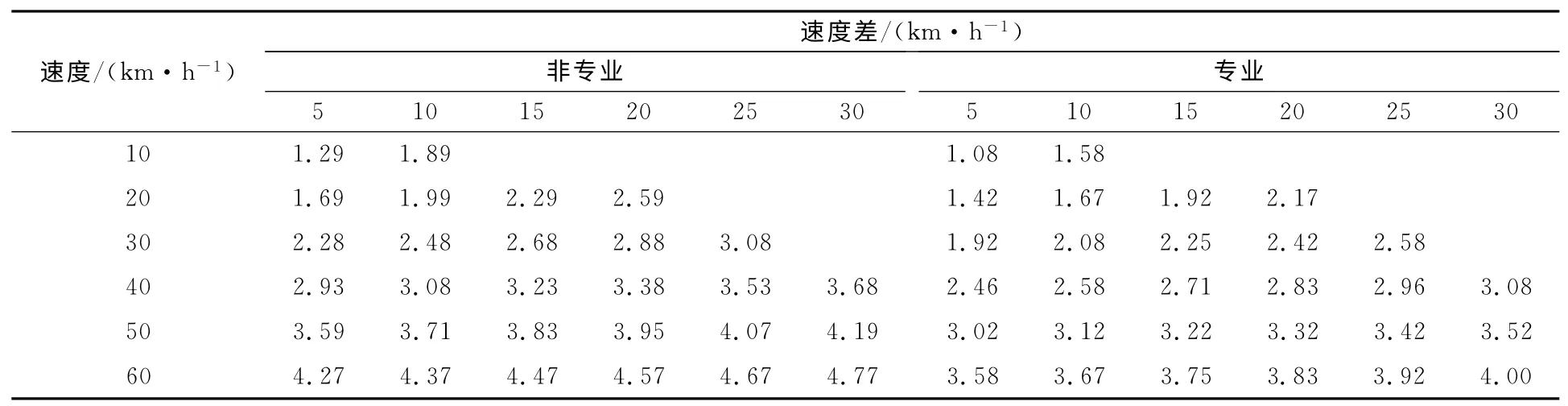
表4 主干道上不同速度和速度差下的安全跟驰状态TTC 标准Tab.4 TTCcriteria of safe car following for specific speeds and speed differences on the urban arterial roads

表5 快速路上不同速度和速度差下的安全跟驰状态TTC 标准Tab.5 TTCcriteria of safe car following for specific speeds and speed differences on the urban expressways
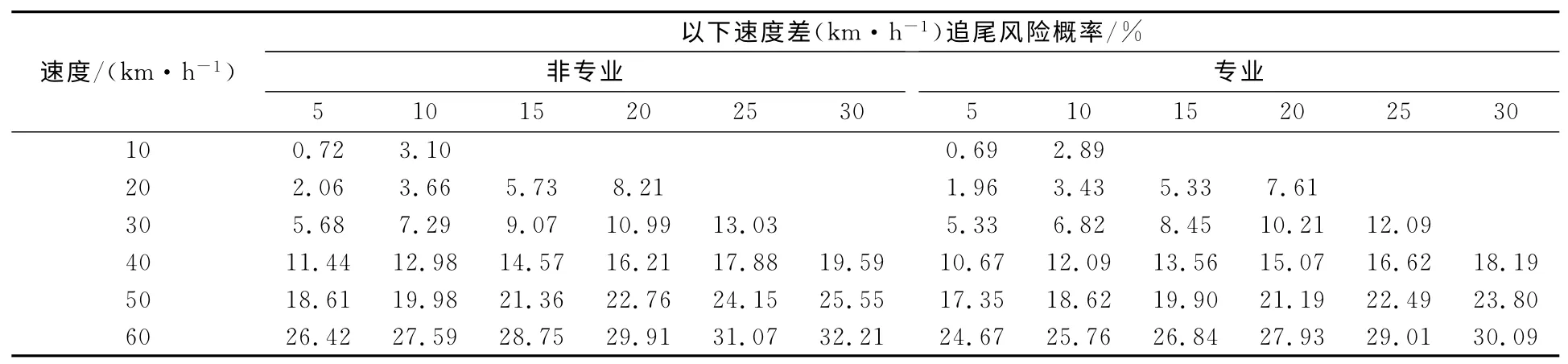
表6 主干道上不同速度和速度差下驾驶人的追尾风险概率Tab.6 Rear-end risk probabilities of car following for specific speeds and speed differences on the urban arterial roads
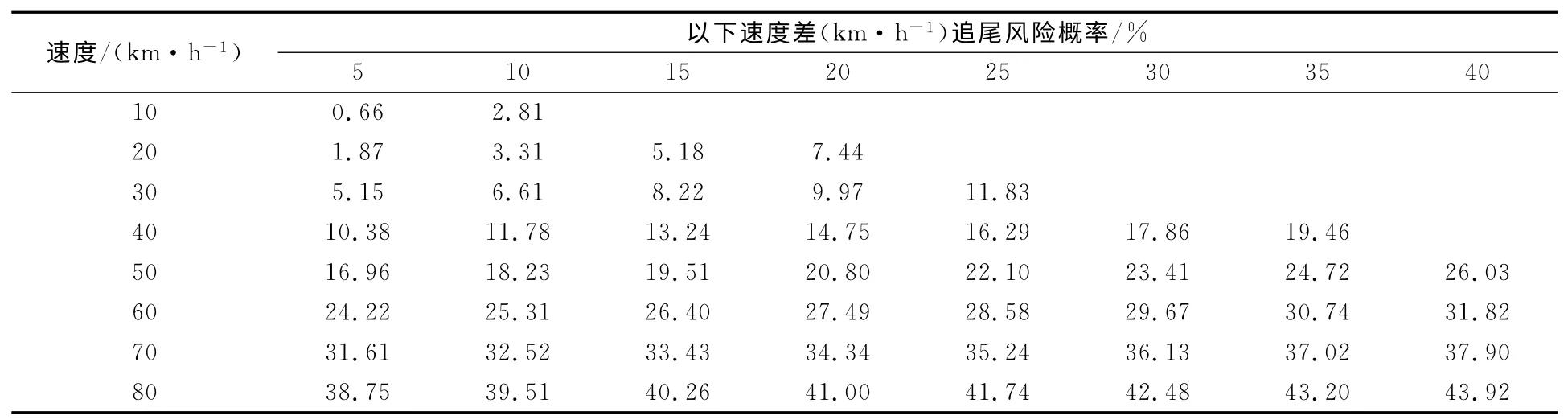
表7 快速路上不同速度和速度差下驾驶人的追尾风险概率(非专业)Tab.7 Rear-end risk probabilities of car following for specific speeds and speed differences on the urban expressways(non-professional drivers)
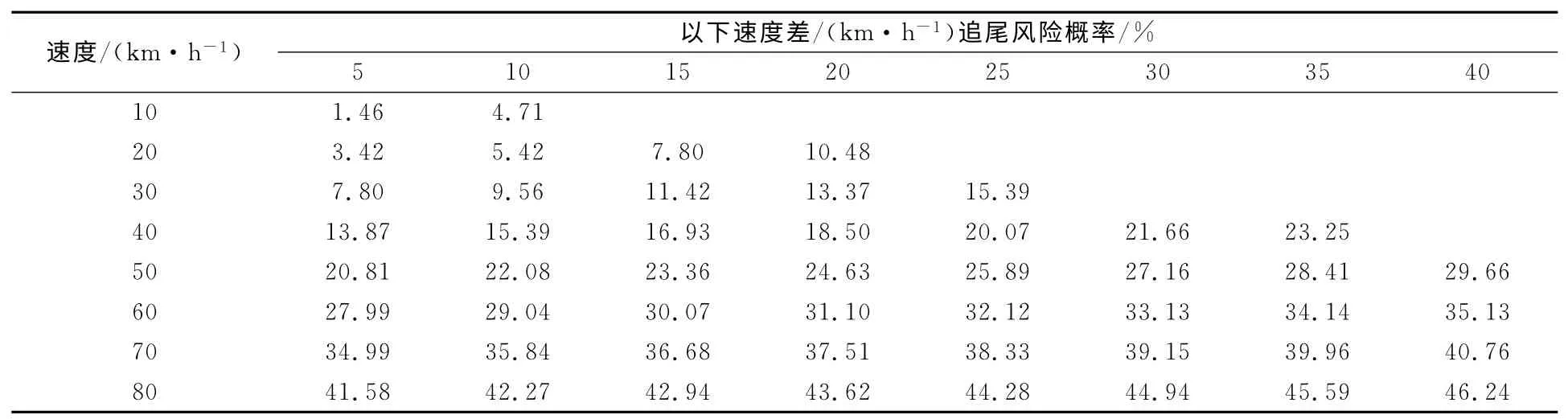
表8 快速路上不同速度和速度差下驾驶人的追尾风险概率(专业)Tab 8 .Rear-end risk probabilities of car following for specific speeds and speed differences on the urban expressways(professional drivers)
对于专业与非专业驾驶人,在主干路与快速路上行驶速度较低时,即使前后车速度差较大发生追尾的风险概率也较低,例如vf=20km/h,Δv=20km/h即跟随车以20km/h的速度行驶,而引导车停止时的追尾风险概率一般都小于10%。随着行驶速度的增加,即使在很小的速度差下发生追尾的风险概率也会迅速增加,例如主干道上vf=60km/,当Δv=5km/h时驾驶人发生追尾的风险概率为25%左右,当Δv=30km/h时发生追尾的风险概率为30%左右。快速路上vf=80 km/h,当Δv=5km/h时驾驶人发生追尾的风险概率高达40%左右,当Δv=40km/h时驾驶人发生追尾的风险概率高达45%左右。
尽管2类驾驶人的追尾风险概率总体上均存在上述趋势,但在不同类型道路上的追尾风险概率仍有差异。在相同的速度条件下,主干路上的非专业驾驶人追尾风险高于专业驾驶人;而在快速路上,却出现了专业驾驶人追尾风险更高的情况。造成此结果的原因是,在相同的速度条件下,非专业驾驶人的跟驰距离一般大于专业驾驶人,并且两者的差异在快速路上更为显著,即非专业驾驶人在快速路上倾向于选择远大于专业驾驶人的TTC,这一倾向大大降低了非专业驾驶人在快速路上的追尾风险。
同样,由上表可知,在相同的速度条件下,专业驾驶人在快速路上的追尾风险高于主干路;而非专业驾驶人在快速路上的追尾风险低于主干路。造成该差异的原因是:非专业驾驶人在快速路上的跟驰距离大于其在主干道上的跟驰距离,且两者之间的差异随速度的增加而增加,另外,非专业驾驶人在主干道与快速路上的跟驰距离标准差也有明显的差异;而专业驾驶人在主干道和快速路上的跟驰距离差异较小,其跟驰距离标准差的也没有明显差异。说明非专业驾驶人选择跟驰距离受道路类型的影响较大,而道路类型对专业驾驶人跟驰距离保持行为的影响较小,专业驾驶人在主干道与快速路上几乎保持相同的跟驰距离。因此,在相同的速度条件下,非专业驾驶人在快速路上倾向于选择的TTC明显大于主干路,而专业驾驶人在两类道路上的TTC差异较小。
4 结束语
笔者采集了真实交通环境下专业和非专业驾驶人的跟驰行为特性数据,得到专业和非专业驾驶人在不同类型城市道路(快速路与主干道)上碰撞时间的统计分布规律。结合判断安全跟驰状态的碰撞时间标准和碰撞时间的分布函数,建立了追尾风险概率模型,计算了主干道和快速路上不同速度和速度差下的追尾风险概率。研究结果表明,专业和非专业驾驶人在不同类型城市道路(快速路与主干道)上行驶速度较低时,即使速度差较大的情况下发生追尾碰撞的风险概率也较低;随着行驶速度的增加,即使速度差很小的情况下发生追尾碰撞的风险概率也会迅速增加。此外,研究还发现,追尾风险也会因驾驶人类型与道路类型的不同呈现趋势上的差异性。由于本文建立的追尾风险概率模型尚未考虑速度、驾驶人自身状态等实时变量,有必要在后续的研究中应该将这些因素在追尾风险概率模型中加以体现,以获取更加准确的预测结果。
[1]王 炜,过秀成.交通工程学[M].南京:东南大学出版社,2011.Wang Wei,Guo Xiucheng.Traffic engineering[M].Nanjing:Southeast University Press,2011.(in Chinese).
[2]Mohamed Abdel-Aty.Analysis of driver injury severity levelsat multiple locations using ordered probitmodels[J].Journalof Safety Research,2003,34(5):597-603.
[3]陆斯文,张兰芳,方守恩.高速公路追尾机理概率分析及风险评价[J].同济大学学报:自然科学版,2011,39(8):1150-1154.Lu Siwen,Zhang Lanfang,Fang Shouen.Probabilistic Analysis and Risk Evaluation of Highway Rearend Collision[J].Journal of Tongji University:Natural Science,2011,39(8):1150-1154.(in Chinese).
[4]朱 彤,赵永红,白 玉,等.跟车风险的概率估计方法研究[J].计算机工程与应用,2009,45(1):13-16.Zhu Tong,Zhao Yonghong,Bai Yu,et al.Study of car-following risk estimation by probability method[J].Computer Engineering and Applications,2009,45(1):13-16.(in Chinese).
[5]朱 彤,谢陈江,王 抢.基于概率计算的车辆碰撞风险模型研究[J].科技导报,2012,30(22):43-47.Zhu Tong,Xie Chenjiang,Wang Qiang.Modeling of vehicle collision risk based on probability analysis[J].Science &Technology Review,2012,30(22):43-47.(in Chinese).
[6]喻 丹.机动车驾驶人行为建模及可靠性分析[D].长沙:长沙理工大学,2011.Yu Dan.The research on driving behavior model and driver reliability analyses[D].Changsha:Changsha University of Science &Technology,2011.(in Chinese).
[7]Hayward J C.Near-miss determination through use of a scale of danger[J].Highway Research Record,1972(384):24-34.
[8]Vogel K.A comparison of headway and time to collision as safety indicators[J].Accident Analysis and Prevention,2003,35(3):427-433.
[9]Kiefera R J,LeBlancb D J,Flannaganb C A.Developing an inverse time-to-collision crash alert timing approachbased on drivers’last-secondss braking and steering judgments[J].Accident Analysis and Prevention,2005,37:295-303.
[10]Balas V E,Balas M M.Driver assisting by inverse time to collision[C]∥Budapest/Hungary:IEEE,World Automation Congress(WAC),2006:24-26.
[11]孟祥海,徐汉清,王 浩,等.基于TTC及DRAC的高速公路施工区追尾冲突研究[J].交通信息与安全,2012,30(6):6-10.Meng Xianghai,Xu Hanqing,Wang Hao,et al.Rear-end conflict of freeway work zone based on TTC and DRAC[J].Journal of Transport Information and Safety,2012,30(6):6-10.(in Chinese).
[12]Li Xiaoqian,Jiang Jun,Lu Jian.Safety Differences between Novice and Experienced Drivers under Car-Following Situations[C]∥11th International Conference of Chinese Transportation Professionals(ICCTP2011).Nanjing,Southeast University and ChineseOverseasTransportationAssociation,2011:2196-2207.
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
天天爱科学(2020年6期)2020-09-10
故事家·花开不败(2019年4期)2019-09-10
现代园艺(2018年3期)2018-02-10
绿色科技(2017年1期)2017-03-01
美术文献(2016年6期)2016-11-10
全球定位系统(2015年4期)2015-02-28
