利用ARMA模型的直流电机模型的辨识
2014-11-14 03:19刘莉欣曹云峰庄丽葵
云南民族大学学报(自然科学版) 2014年1期
刘莉欣,曹云峰,庄丽葵,王 彪
(1.南京航空航天大学自动化学院,江苏 南京210016;2.南京航空航天大学 高新技术研究院,江苏南京210016)
四旋翼飞行器是一种具有4个螺旋桨的飞行器,并且4个螺旋桨呈十字形交叉结构,相对的四旋翼具有相同的旋转方向,分2组,2组的旋转方向不同.具有垂直起降稳定悬停和自主巡航能力.与传统的直升机不同,四旋翼直升机能通过改变螺旋桨的速度来实现各种动作.在军事和民事领域具有广阔的应用前景.
微小型四旋翼飞行器的姿态取决于4个直流电机的转速[1].为了精确控制电机的转速,通常对电机模型的传递函数进行辨识,电机的扭矩和角速度等输出取决于当前输入电压.当然它们的这种相关性取决于电机的电感、电阻、转动惯量以及摩擦因数和载荷等因素.用系统辨识方法确定的传递函数相对比机理建模准确,辨识得到直流电机模型的一种方法是利用递推预报误差方法(RPEM),该方法利用电压作为输入,位置信息作为输出,有研究者利用一个加有噪声的变化电压作为输入,位置信息作为输出来进行辨识,然而极少能得到准确模型.系统辨识方法也广泛应用于非线性机电一体化系统[2]、异步电机[3]、数控机床[4]和机器人技术[5]方面.本文直流电机模型的辨识将利用脉冲响应来得到输出数据,通过最速下降自回归滑动平均模型算法(ARMA)来将原系统输出角速度和辨识模型的角速度之间的误差降到最小[6].建立起ARMA模型后通过脉冲响应辨识出系统的Z变换传递函数模型.
1 直流电机模型
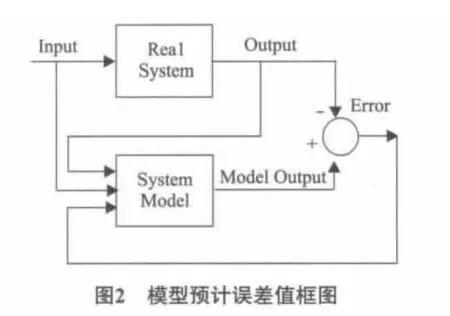
对于直流电机,根据机械和电压守恒有以下2个等式:
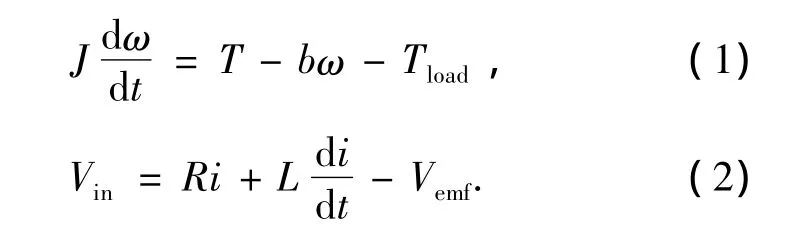
其中T为电机扭矩,Tload为电机载荷扭矩,ω为电机角速度,J为电机转动惯量,b为电机摩擦因数,Vin为电机输入电压值,Vemf为电磁式电压力,i为电机电流,R为电机绕组阻值,L是电机绕组电感.
另外扭矩T和电机当前电流存在比例关系,电磁电压Vemf与电机角速度ω存在比例关系,

其中Km是电机机械常数,Ke为电机电力常数.
另外电机载荷的扭矩可以进一步化成包含载荷转动惯量的形式.

将(3)~(5)式代入(1)、(2),将输入电压作为输入,电机转速作为输出并且进行拉氏变换,得到电机输入输出模型,如图1所示.
2 ARMA模型和最速下降算法
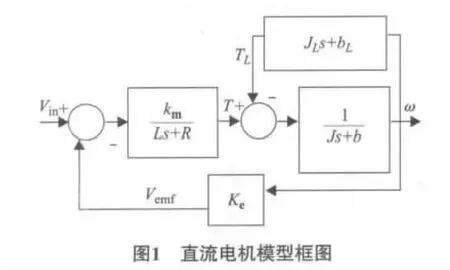
系统辨识指的是通过实验数据(系统的输入和输出)来确定系统的模型.
在ARMA模型中,假设被辨识的系统满足以下条件:


输入输出值可通过待辨识系统的仿真或物理模型的实际测量得到,输入输出在式(6)中用来计算,它们的关系如图2所示,aj和bi随着输入输出的值变化而变化,使得误差最小.

其中p是有效数据采样数,每个序列最小二乘逼近值为:

这是我们需要的最小化误差方程.
最速平滑下降算法可以在此处用来计算误差的最小值,通过以下求导可得:
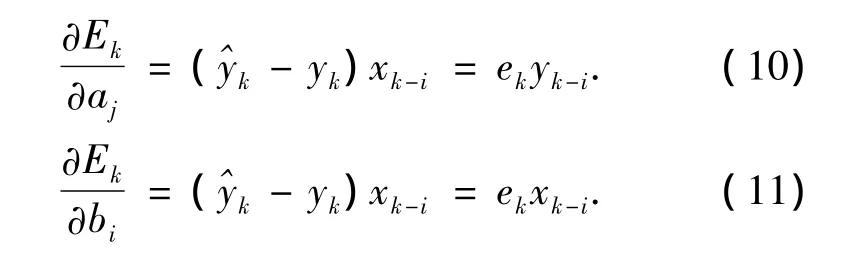
最速下降平滑算法被用来得到以下不断更新的值:

其中α为步长,为了得到最佳步长值,可以利用线性搜索方法,但该方法相对用时较长,参数确定之后,我们就可以利用计算ARMA模型的Z变换来得到待估计模型的传递函数:


我们知道,当系统的输入为脉冲函数时,系统的输出为y(n),等于该系统传递函数h(n).因此系统输出的Z变换等于系统传递函数的Z变换值H(z).
3 仿真结果
利用脉冲输入来使得电机模型产生角速度的输出,然后根据已知的输入和电机角速度的输出,利用ARMA算法对模型参数aj和bi进行计算,从而就能得到待辨识的模型.
对实验室飞行器上的电机进行辨识,已知飞行器400个输入数据,400个输出数据,取步长为5×10-7,5 ×10-6,1 ×10-5,辨识模型输入输出如图3 ~5所示,可见步长取5×10-6更加接近电机实际输出模型,步长越小,待辨识模型接近实际模型的速度变慢,而步长过大导致电机待辨识模型噪声过大,最大值与最小值之间差距抖动剧烈,模型结构相对不稳定.因此我们取比较接近实际模型的步长值5×10-6.图6为实际电机模型输出.
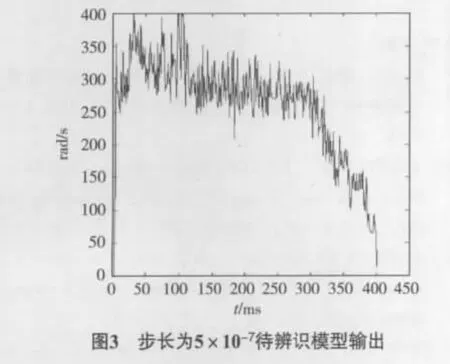
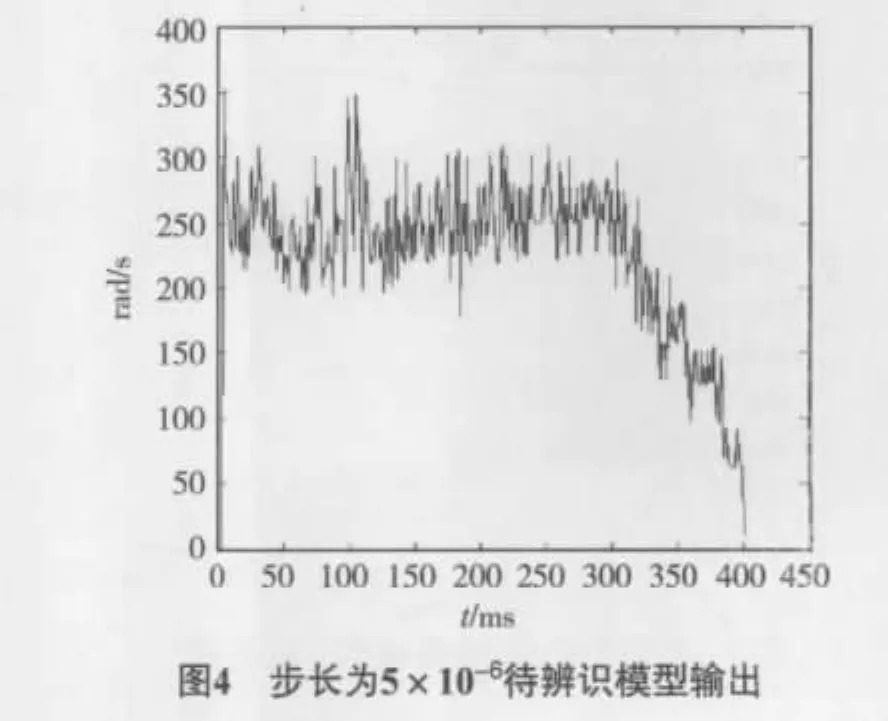
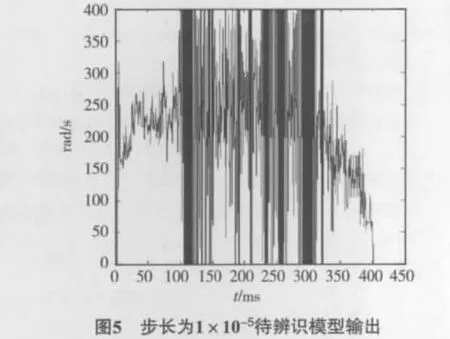
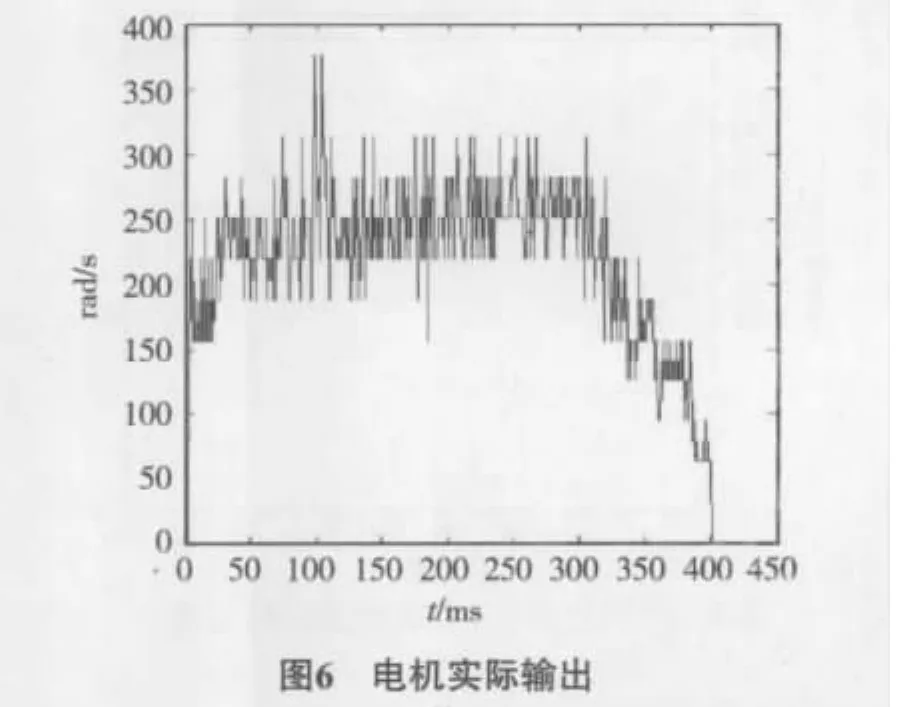
图6与图4很相似,一定程度保证了数据的有效性.通过已知的输入输出和本文第3章介绍的ARMA及最速下降平滑算法,可以计算出aj和bi的值,从而得到系统脉冲传递函数的模型.分别对系统进行3阶、4阶和5阶的脉冲传递函数的计算,结果为
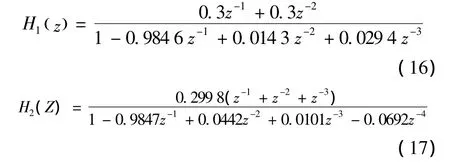

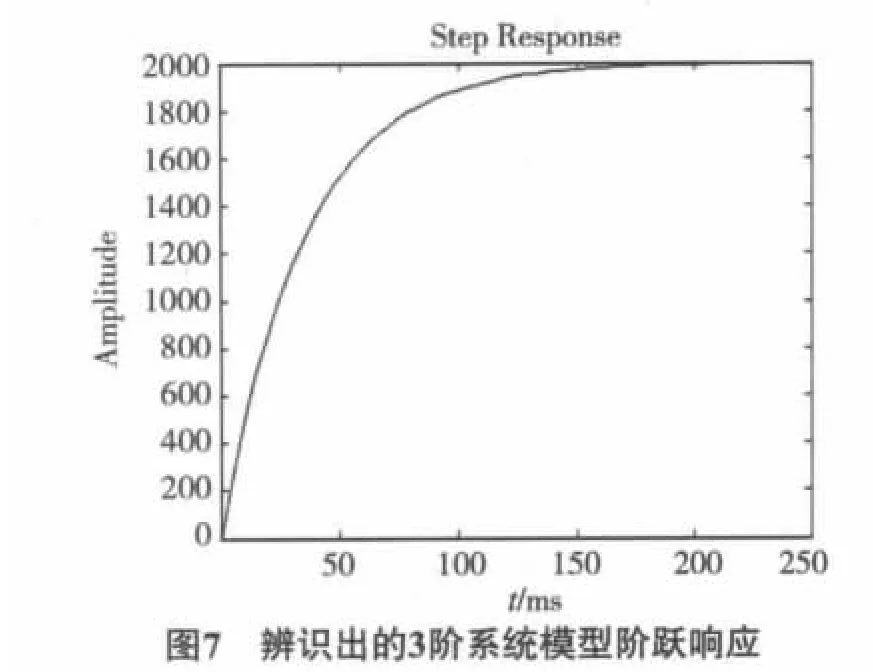
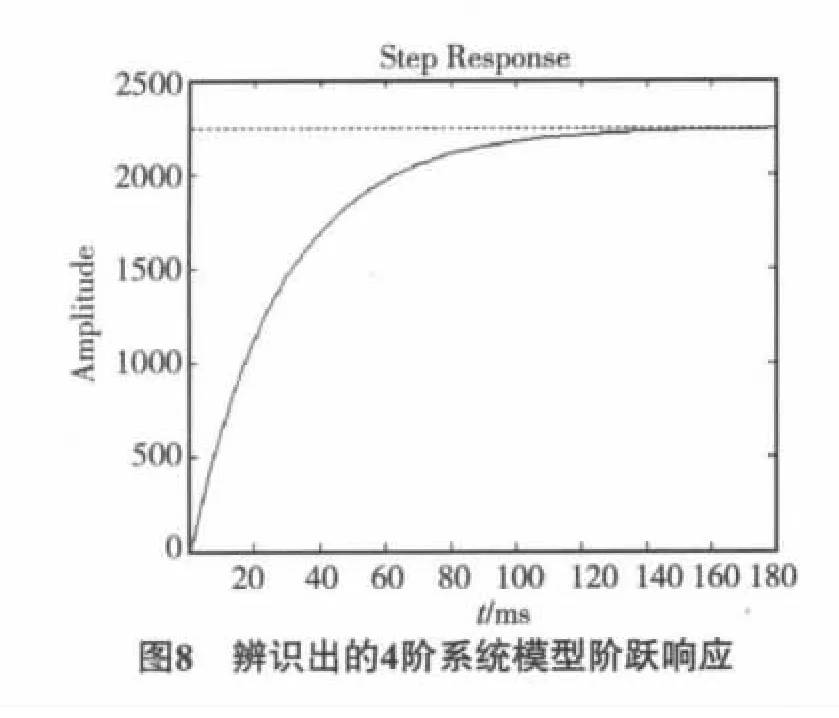
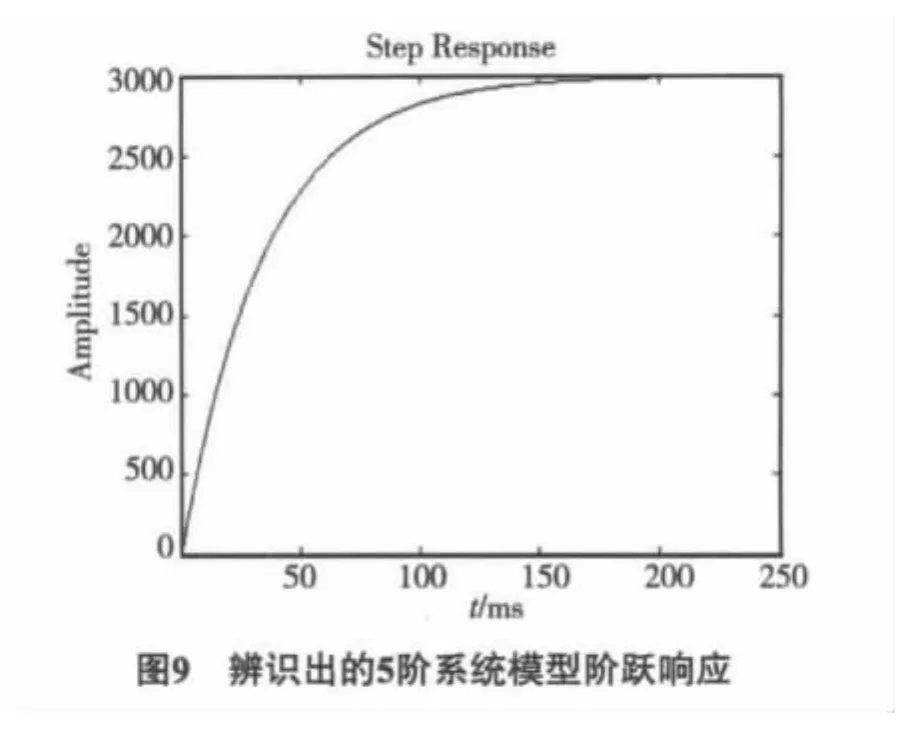
不同阶数脉冲传递函数得到的系统进行阶跃响应,曲线如图7~9所示.
4 结语
阶跃响应输入值为1,而电机采用的输入值为前200个数据是0.15定值,后200个数据是0.图3中可见,前200 ms时系统已达稳定状态,电机输出峰值在300~350 rad/s,部分值接近400 rad/s,我们对辨识出的3阶系统模型进行阶跃输入,可见输出值为2 000左右;对辨识出的4阶系统模型进行阶跃输入,可见输出值为3 000左右;而我们对辨识出的5阶系统模型进行阶跃输入,可见输出值为3 000左右.3阶系统稳定值与电机模型输出输入值相比,比4阶与5阶系统的更接近.可见3阶系统更接近系统真实值.因电机系统本来阶数较小,增大阶数反而引进了不必要的误差,并且阶数越大引入的误差反而越大,未来我们可以对输出信号进行多种阶数的测试,并对电机输出值进行滤波处理,将野值进行剔除,这样所得结果会更准确.
[1]杨成顺,杨忠,张强.一种新型多旋翼飞行器的建模与反演控制[J].济南大学学报:自然科学版,2013(1):52-58.
[2]ANGERER B T,HINTZ C.Online identification of a nonlinear mechatronic system[J].Control Engineering Practice,2004,12(11):1465-1478.
[3]KOUBAA Y.Recursive identification of induction motor parameters[J].Simulation Modelling Practice and Theory,2004,12(5):363-381.
[4]YAN M T,LEE M H,YEN P L.Theory and application of a combined self-tuning adaptive control and crosscoupling control in a retrofit milling machine[J].Mechatronics,2005,15(2):193-211.
[5]ÖSTRING M,GUNNARSSON S,NORRLÖF M.Closedloop identification of an industrial robot containing flexibilities[J].Control Engineering Practice,2003,11(3):291-300.
[6]郭永刚,许亮华,水小平.基于脉冲响应数据的ARMA法建模以及模态参数识别[J].地震工程与工程振动,2006,26(5):167-171.
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
华东师范大学学报(自然科学版)(2021年3期)2021-06-03
装备制造技术(2019年12期)2019-12-25
陕西科技大学学报(2019年4期)2019-07-04
铁道通信信号(2019年3期)2019-04-25
教育教学论坛(2018年39期)2018-09-25
校园英语·中旬(2017年10期)2017-11-20
吉林省教育学院学报(2017年3期)2017-05-31
电子制作(2017年1期)2017-05-17