一类非线性系统的稳定性及分岔分析
2014-11-14 03:19:36张宇功王小斌
云南民族大学学报(自然科学版) 2014年1期
张宇功,常 胜,王小斌
(兰州交通大学数理学院,甘肃 兰州730070)
从理论上对于非线性动力系统的研究比较困难,特别是高维非线性系统,因此我们希望通过一定的方法对其进行简化,并希望简化后的系统能够保持原系统的动力学特性,通过国内外专家研究已经产生了很多简化系统的途径,例如中心流形[1]理论、范式方法、Lyapunov-Schmidt方法等等.
Duffing方程是非线性理论中常用的代表性微分方程,尽管是从简单物理模型中得出来的非线性振动模型,但是其模型具有代表性.工程中的许多非线性振动问题的数学模型都可以转化为该模型,因此,人们对Duffing方程进行了广泛而深入的研究,并且对Duffing方程的混沌运动有了越来越深入的了解和认识[2].
本文首先描述了中心流形,用中心流形对一类比Duffing系统更一般的含有二次和三次非线性项的受迫振动系统[3](Duffing方程可以视为这一非线性动力方程的特殊情形)降维,并研究其稳定性及分岔特性,它代表着许多非线性振动的控制方程[4].最后用 Matlab 进行仿真.
1 中心流形
考虑自治系统

其中f:D→Rn是连续可微的,且D⊂Rn是包含原点x=0的定义.
定义1[5]设M是一个连通的度量空间,满足
1)M有开覆盖{Uα},即Uα是开集,M=Uα;
2)对任意的α∈A,Uα同胚于Rn中的单位开球:B={x|x∈ Rn,x< 1};
3)若Uα∩Uβ≠φ,hα和hβ分别是从Uα和Uβ到Rn中单位开球B的同胚映射,则h=hα·是从Rn中的开集hβ到Rn中开集hα的可微映射,且对任意x∈hβ,雅克比矩阵的行列式非零,即 Dh(x)≠0.则称M是一个n维可微流形.
k维流形有严格的定义,见文献[6].
定义2[7]如果 η(x(0))=0⇒η(x(t))≡0,∀t∈[0,t1)⊂R其中[0,t1)是解x(t)有定义的时间区间,则称流形{η(x)=0}是方程(1)的不变流形.
现在假设f是2次连续可微的,则方程(1)可表示为

其中
是2次可微的,且

我们只考虑无法线性化处理的情况,故假设A有k个实部为0的特征值,m=n-k个特征值实部为负.我们总可以找到一个相似变换矩阵T,将A转换为分块对角矩阵
其中A1的所有特征值实部为0,A2的所有的特征值实部为负.显然,A1是k×k矩阵,而A2是m ×m矩阵,应用变量代换

将方程(1)转换为

其中g1和g2具有~f的性质.具体地说,它们是2次连续可微的,且

其中i=1,2.若z=h(y)是方程(2)和(3)的不变流形,且h是光滑的,则如果

就称z为中心流形,关于中心流形的一些概念见文献[8].
定理1[7]如果g1和g2是二次连续可微的,且满足(4),A1的所有特征值均实部为零,A2的所有特征值均实部为负,则存在一个常数δ>0和对于所有y<δ有定义的连续可微函数h(y),使得z=h(y)是方程(2)和方程(3)的中心流形.
如果系统(2)~(3)的初始状态位于中心流形,即z(0)=h(y(0)),那么对于所有的t≥0,解(y(t),z(t))将位于该流形内,即z(t)≡h(y(t)).在这种情况下,中心流形内系统的运动可由k阶方程

描述,这个方程称为降阶系统.
定理2[7]在定理1的条件下,如果降阶系统(5)的原点y=0是渐近稳定的(或非稳定的),则整个系统(2)~(3)的原点也是渐近稳定的(或非稳定的).
如果能够求出临界情形下非线性系统(1)的中心流形,那么就可以通过研究其约化系统的稳定性来研究系统(1)的临界稳定性问题.根据中心流形对流的不变性,中心流形z=h(y)的求解可考虑系统(1)的临界稳定性问题,根据中心流形的不变性,在应用定理2时,需要求出中心流形z=h(y).
函数h为偏微分方程
的一个解,其边界条件为

在大多数情况下,该方程对h不能准确求解(如果能获得准确的解,则表明求出整个系统的解),但该解能够以y的泰勒级数任意逼近.
定理3[7]如果可以找到一个连续可微的函数φ(y),且φ(y)=0,[∂φ/∂y](0)=0,使得对于p >1,有N(φ(y))=O(yp),则对于足够小的y,有h(y)-φ(y)=O(yp)且降阶系统可表示为y˙=A1y+g1(y,φ(y))+O(yp+1).
对于标量方程y˙=ayp+O(yp+1),其中 p为正整数.如果p是奇数且a<0,则原点是渐近稳定的;如果p是奇数且a>0,或者p是偶数且a≠0,则原点是不稳定的.
2 质量 -弹簧系统模型
图1所示的质量 -弹簧系统中[7],在水平面上滑动并通过弹簧连接到竖直表面的物体m受到一个外力F的作用.
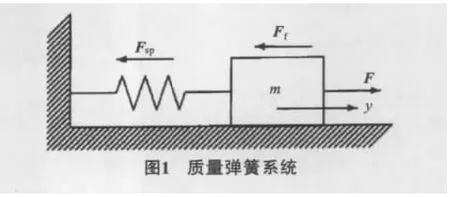
定义物体距离参考点的位移为x,根据牛顿运动定律,有

其中Ff是摩擦阻力,这里我们考虑摩擦阻力为黏滞摩擦力,即当物体黏滞介质,如空气或润滑剂中运动时,会有由于黏滞性引起的摩擦力.这个力通常按照速度的非线性函数建模,即Ff=h(v),h(0)=0.当速度较小时可假设为Ff=αv.Fsp是弹簧的回复力.设Fsp只是位移x的函数,即Fsp=g(x),同时假设参考点位于g(x)=0处,外力由我们设定.对于不同的F,Ff和g,会出现几个不同的自治和非自治二阶系统模型.
对于其他几种情我们不予考虑,我们只考虑弹簧的恢复力为

和线性黏滞摩擦力

时系统的特性.
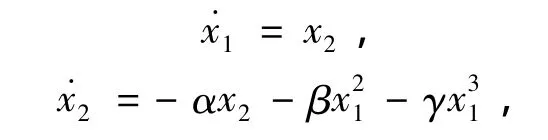
可得到无驱动力的含二次和三次非线性项的系统:

其中α为阻尼系数,β,γ为常数.
显然当β=0,F=Acos(w t)时,系统就是典型的Duffing系统.
为研究方便,接下来假设当m=1时,系统随α变化时的分岔行为.
设x1=x,x2=,则(1)式可化为
其雅克比矩阵为
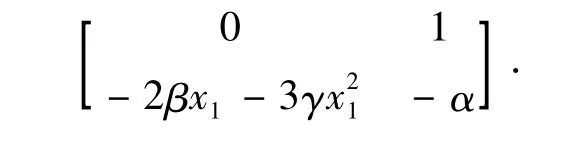
其特征值为λ1=0,和λ2=-α,A有实部为零和实部为负的特征值,因此原点为非双曲平衡点.
令M是矩阵A对应的基解矩阵,
即,
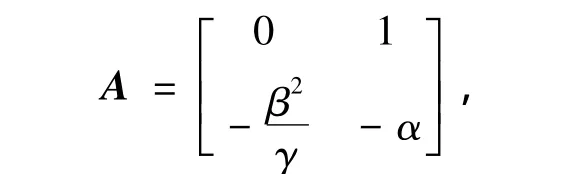
系统在原点的雅克比矩阵为
令T=M-1
则,可得
运用变量代换如下
为了理论研究方便,不妨取β=γ=1,则将系统化为
该系统有中心流形,
尝试令 y=h(z)=az2+O(3).
由中心流形偏微分方程
且由

比较两边x的同次幂系数得系统的中心流形近似表达式为

因此将其代入

可得
化简可得
因此原系统的稳定性与该约化系统的稳定性等价,即原点是不稳定的.
3 数值仿真验证
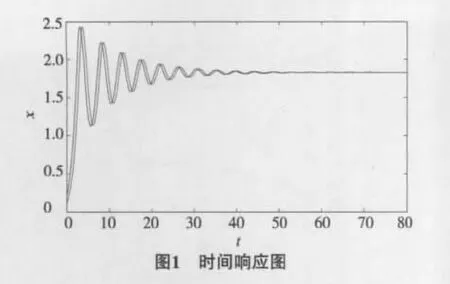
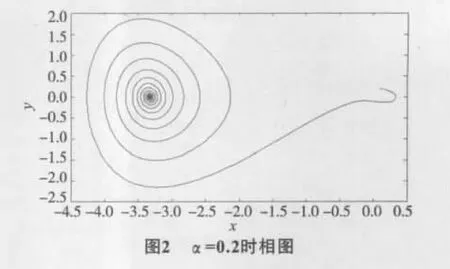
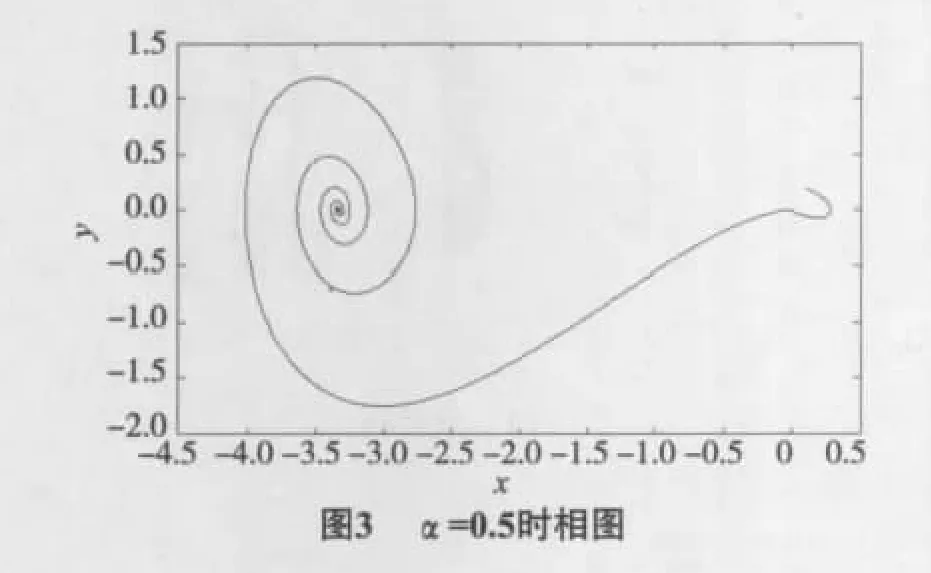
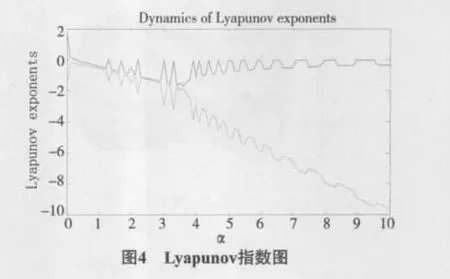
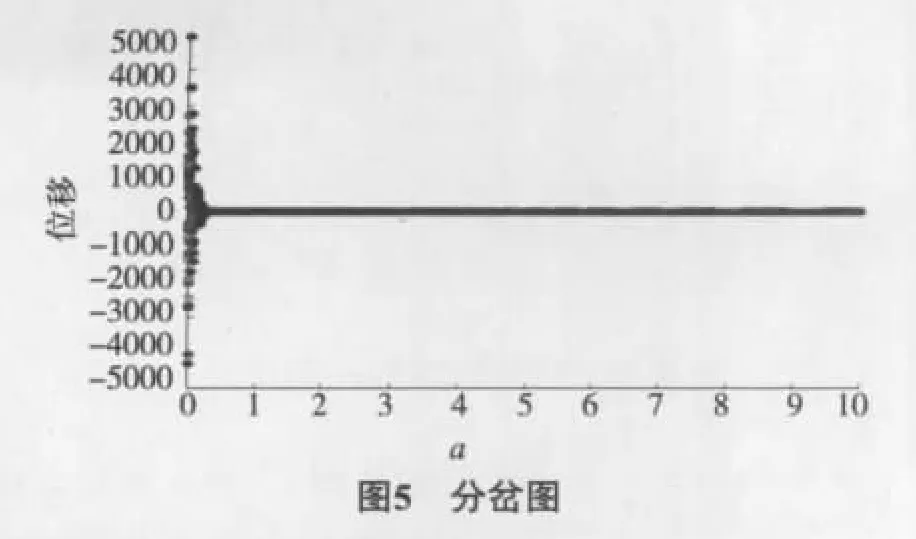
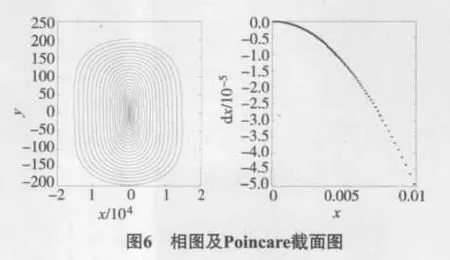
首先考虑有阻尼无驱动情况即对于F=0时的情况,此时w取何值并不影响系统模拟.初值取(0.1,0.2),α =0.2,β =1,γ =0.3 时从时间响应图(图1)可以看出虽然初值相差0.1但在有限时间内2条曲线很快会成为1条重合的曲线,这说明了系统稳定.当 α =0.2,β =1,γ =0.3 时的相图2 和 α =0.5,β=1,γ=0.3时的相图3可以看出随阻尼系数增大,系统会很快恢复到平衡态.从Lyapunov指数(图4)及分岔(图5)可以看出,系统随阻尼系数α增大从开始的混沌状态很快进入到稳定状态,从相图及Poincare截面(图6)也可得出系统是稳定的.
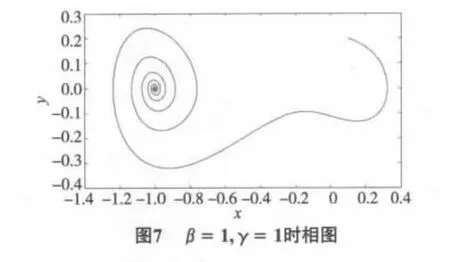
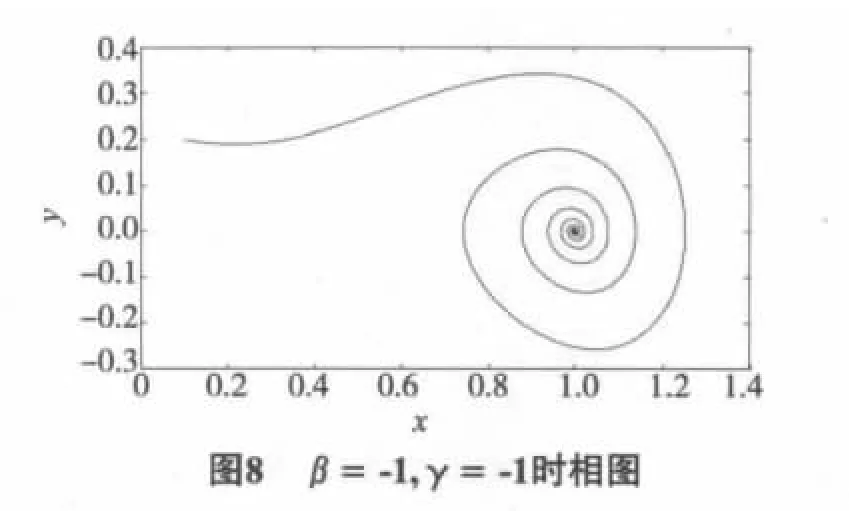
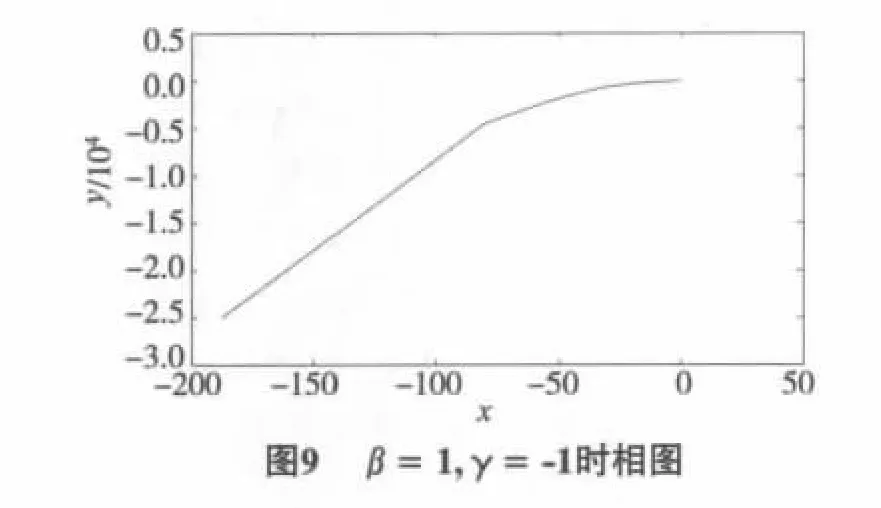
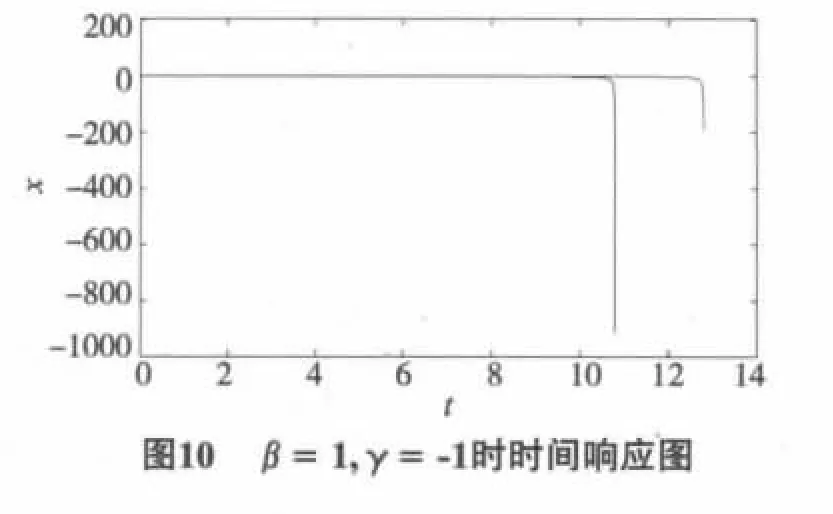
从初值取(0.1,0.2),α =0.2,β =1,γ =1 时的相图7和α =0.2,β=-1,γ=1时的相图8可以看出,β只改变平衡点的位置而不改变系统的稳定性.从初值取(0.1,0.2),α =0.2,β =1,γ =1 时的相图7和α =0.2,β=1,γ =-1时的相图9及时序图10可以看出,γ的正负可以影响系统平衡点的稳定性,这与我们前面的结论刚好一致.
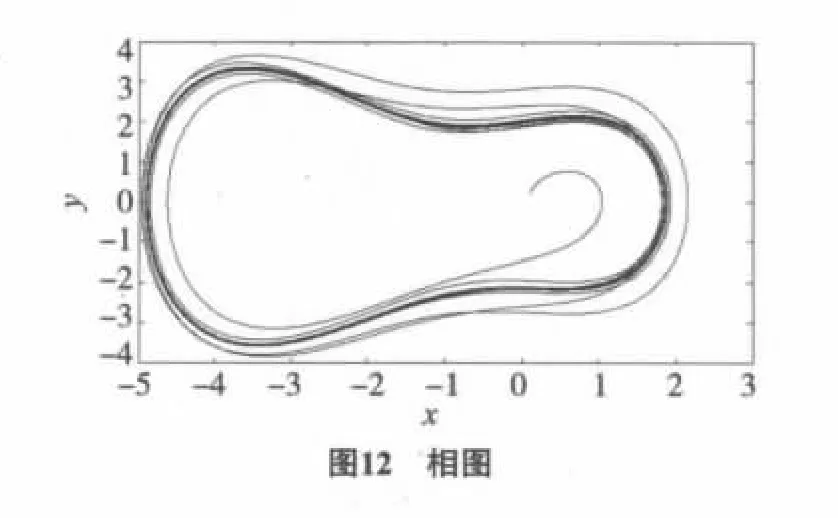
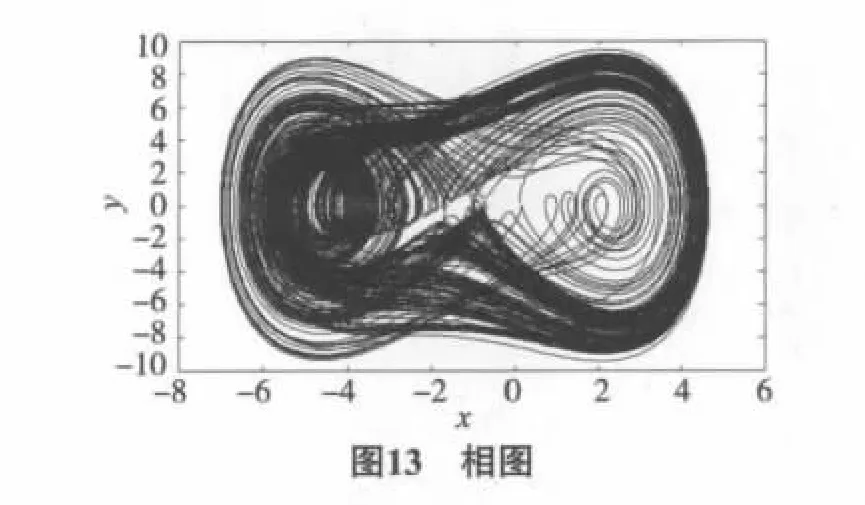
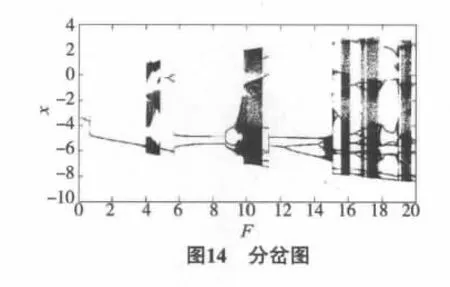
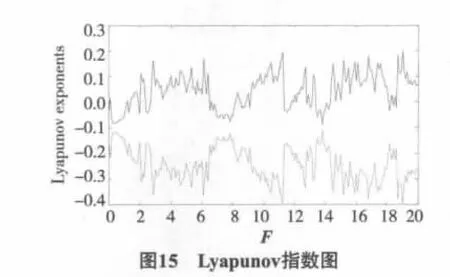
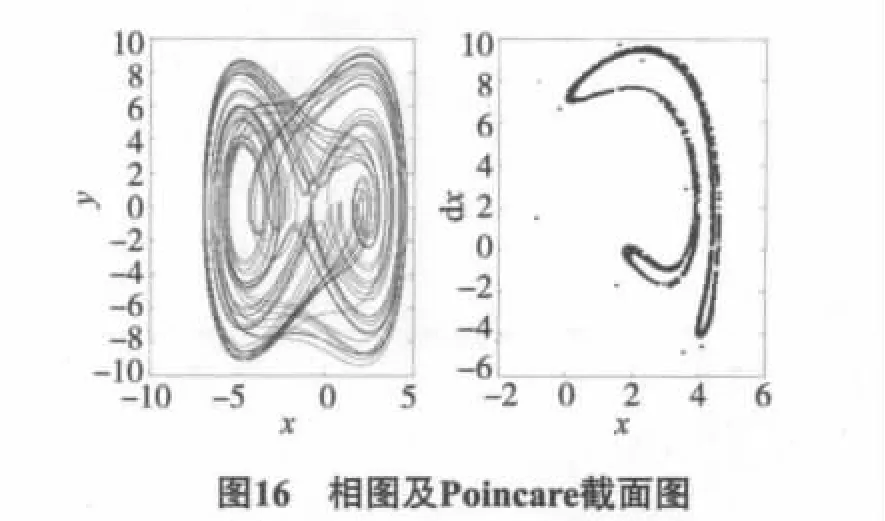
接下来我们考虑有阻尼有驱动的情况即F≠0,我们取w=1.初值取(0.1,0.2),α =0.2,β =1,γ =0.3,w=1,F=1 时的相图12 和 α =0.2,β =1,γ =0.3,w=1,F=10时的相图13可以看出当F增大时,系统不容易恢复到平衡态,并且随F增大系统会出现分岔及混沌现象.从图14~16同样可以得出在其它因素不变时,随F增大系统会出现分岔及混沌现象.
4 结语
本文首先描述了中心流形,其次用中心流形对比Duffing系统更一般的含有二次和三次非线性项的受迫振动系统降维,并研究其稳定性及分岔特性.通过数值模拟,我们发现各参数对系统影响程度有所不同,从线性化可以看出由于α>0,若γ>0则(,0)为一渐近稳定平衡点,若γ<0则(,0)为一不稳定平衡点.而 其稳定性与β无关.当考虑驱动力时参数F对系统的影响最大,此时系统会出现新的平衡点,随参数F的增大,系统会出现分岔现象和混沌现象,因此我们对于有驱动力的系统应该相应增大阻尼系数来保证系统的稳定性.
[1]CARR J.Applications of centre manifold theory[M].New York:Springer- Verlag,1981.
[2]HOLMES P,MARSDEN J.A partial differential equation with infinitely many periodic orbits:chaotic oscillations of a forced beam[J].Archive for Rational Mechanics and A-nalysis,1981,76(2):135 -165.
[3]韩强,张善元,杨桂通.一类非线性动力系统混沌运动的研究[J].应用数学和力学,1999,20(8).
[4]韩强.几种结构的动力屈曲、分叉和混沌运动研究[D].太原:太原工业大学,1996.
[5]马知恩,周义仓.常微分方程定性与稳定性方法[M].北京:科学出版社.2001:211 -212..
[6]GUILLEMIN V,POLLACK A.Differential topology[M].American Mathematical Soc.,2010.
[7]HASSAN K.非线性系统[M].朱义胜,董辉,李作洲,等,译.北京:电子工业出版社,2005.
[8]BARREIRA L,VALLS C.Center manifolds for difference equations—smooth parameter dependence[J].Nonlinear Analysis:Theory,Methods & Applications,2010,73(3):725-749.
猜你喜欢
数学物理学报(2020年2期)2020-06-02 11:28:48
数学学习与研究(2020年23期)2020-01-11 08:47:27
数学年刊A辑(中文版)(2019年3期)2019-10-08 07:34:38
现代苏州(2019年16期)2019-09-27 09:31:02
语言与文化论坛(2019年3期)2019-04-13 02:25:04
数学物理学报(2019年1期)2019-03-21 05:26:18
湖北文理学院学报(2017年2期)2017-04-16 05:09:06
卷宗(2016年8期)2016-11-15 20:56:37
电测与仪表(2016年2期)2016-04-12 00:24:48
燕山大学学报(2015年4期)2015-12-25 02:20:01