
基于误差修正的直接力/气动力双层姿态控制设计①
2014-09-19 08:13雷虎民段朝阳丁玉山
固体火箭技术 2014年6期
邵 雷,雷虎民,段朝阳,丁玉山
(1.空军工程大学防空反导学院,西安 710051;2.中国空空导弹研究院,洛阳 471009;3.空军地空导弹装备检验所,三原 713800)
基于误差修正的直接力/气动力双层姿态控制设计①
邵 雷1,雷虎民1,段朝阳2,丁玉山3
(1.空军工程大学防空反导学院,西安 710051;2.中国空空导弹研究院,洛阳 471009;3.空军地空导弹装备检验所,三原 713800)
针对直接力/气动力复合姿态控制问题,将具有扩张观测器的动态逆控制与最优控制相结合,设计了一种基于误差修正的直接力/气动力复合控制双层姿态控制方法。该控制方法以气动力控制为主,将滑模变结构控制与动态逆控制相结合进行气动力控制,通过引入扩展观测器对控制系统中的不确定干扰进行估计与补偿,以提高控制系统的鲁棒性;在此基础上,基于最优控制方法进行直接力控制设计以实现跟踪误差快速修正,达到提高系统响应速度的目的。与气动力单独控制的仿真结果对比表明,该复合控制算法能够有效改善系统的动态响应特性。
复合控制;变结构控制;动态逆控制;扩张状态观测器;最优控制
0 引言
随着空天技术的发展,空袭导弹呈现体积小、速度快、机动性强等特点,对拦截武器制导控制精度提出了更高的要求。传统纯气动力控制方式由于响应速度有限、非最小相位造成的延迟,尤其是在高空、大机动、大迎角等气动效率低等方面的不足,难以满足拦截武器的这种需求[1]。在传统的空气动力控制基础上引入直接力控制,利用脉冲燃气发动机或燃气喷嘴直接产生弹体飞行控制所需的力和力矩,通过直接侧向力弥补气动力效率的不足,实现拦截器的快速稳定控制和过载控制,保证拦截器在具有大过载能力的同时具有极快的响应速度[2],因此该方法受到普遍关注。
本文针对上述问题,结合直接力与气动力控制各自的特点,将基于带有扩张观测器的滑模变结构控制与动态逆控制相结合进行气动力控制以增强系统的鲁棒性与抗干扰性,并将其与最优控制方法相结合设计一种基于误差修正的直接力/气动力双层控制方法。
1 复合控制系统数学建模
采用文献[4]中的导弹模型进行研究,考虑末制导阶段导弹的姿态控制问题,由于在末制导过程中导弹的尾部发动机已停止工作,且末制导时间较短,因此将导弹的质量和速度视为常值,经过合理变换可得到弹体坐标系下导弹姿态运动的数学模型描述为
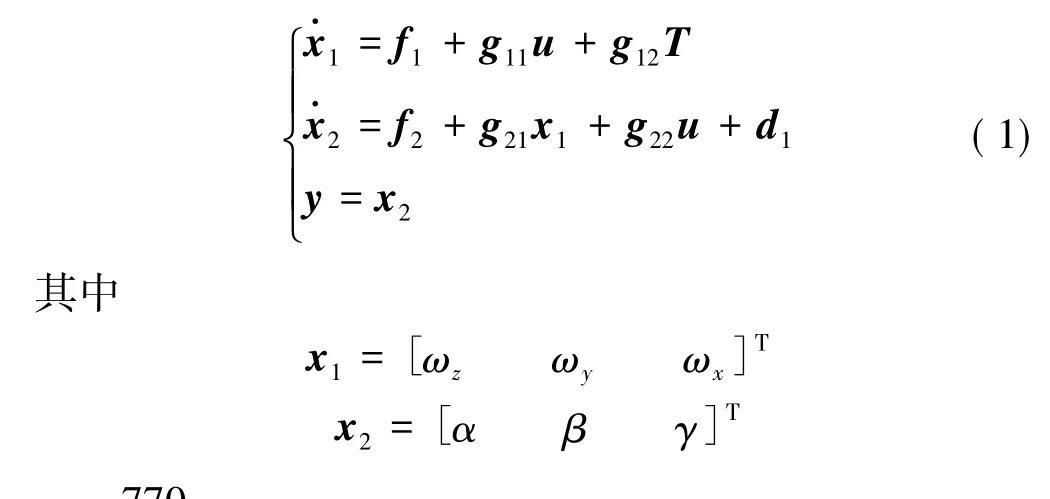
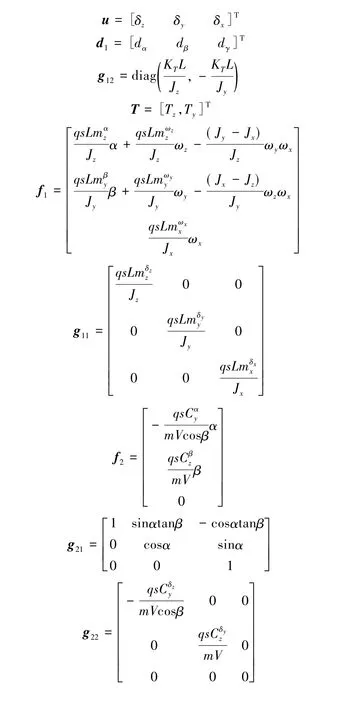
式中 α、β、γ 分别为攻角、侧滑角、滚转角;δx、δy、δz分别为副翼、方向舵、升降舵的偏转角;ωx、ωy、ωz分别为导弹绕弹体坐标系 ox1、oy1、oz1轴的转动角速度;dα、dβ、dγ分别为攻角、侧滑角、滚转角的干扰项;Tz,Ty为弹体系下的直接力;Jx、Jy、Jz为导弹对弹体坐标系各轴的转动惯量。
2 直接力/气动力双层复合控制策略
在直接力与气动力复合控制拦截器姿态控制系统的工作过程中,由于直接侧向力的脉冲特性,依然是利用气动升力和侧向力形成过载。直接力的主要作用是在姿态响应初始阶段快速产生姿态角速度,以快速建立一定的攻角和侧滑角,从而形成气动升力和直接侧向力,提高响应速度,减小过载偏差。因此,为实现过载跟踪,需实现攻角和侧滑角跟踪。然而,由于直接力本身固有的工作形式,使得单独利用直接侧向力控制无法完全消除过载偏差,因此,需要气动舵控制与直接力控制相互协调,取长补短,以达到较好的控制效果。
然而,直接侧向力在工作时会带来较强的干扰效应[11]。基于此,论文进行控制系统设计时,结合直接力与气动力工作的特点,以气动力优先控制为主,采用直接力控制对气动力控制进行误差补偿的方式设计双层复合控制其结构图如图1所示。当误差较大时,启动直接力控制装置,实现快速误差补偿;直接力控制装置采用PSR调制器,调制器输出为1表示允许发动机点火。
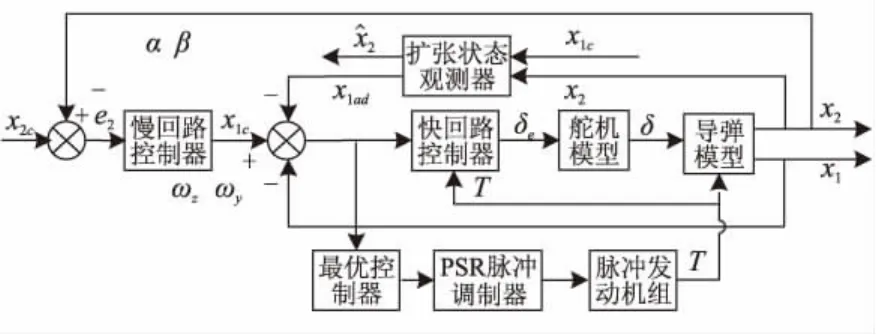
图1 复合控制结构图Fig.1 Blended control structural diagram
2.1 带有扩张观测器的气动力子系统控制律设计
考虑脉冲发动机开机时直接力将对气动力控制系统产生干扰,在气动力控制子系统设计时,采用基于滑模变结构控制与动态逆控制相结合的方法进行控制系统设计,以提高系统的鲁棒性。
沼液为民和沼液,含 N 0.57%,P2O50.007%(实际计算施肥量时忽略)、K2O 0.35%。玉米品种为金海5号。
2.1.1 快回路控制器设计
考虑论文采用气动力优先控制而直接力控制非持续工作的特点,在基于动态逆进行快回路设计时,认为直接力控制装置已经工作结束,则式(1)中的第一项可简化为如下形式:

基于动态逆控制思想进行快回路控制律设计,其设计目标是对快变量x1进行线性化解耦控制,使得闭环后的快变量动态特性为如下形式:

式中 x1d=[ωzdωydωxd]T为理想的转动角速度信号;x1cd=[ωzcωycωxc]T为慢回路控制律产生的指令信号;k1=diag{kz,ky,kx}为回路带宽,k1=diag{20,20,20}。
对式(3)求逆,即可解出期望控制量uc为

回路带宽的选取要符合工程实际的需要。在快回路设计中,首先,必须使状态变量能够较快地跟踪控制输入信号;其次,快回路带宽的选择要考虑舵面的工作情况,符合工程实际,其信号的大小及其变化率要考虑到舵面非线性饱和因素的影响。综合以上因素,同时考虑到协调控制减小侧滑。
2.1.2 慢回路变结构控制律设计
由于舵面偏转产生的操纵力和侧向直接力对慢变量的影响均很小,且离散脉冲形式的直接力作用时间较短。所以,在设计慢回路控制律时,可将舵面偏转产生的操纵力和侧向直接力作为系统扰动处理,结合滑模变结构控制具有鲁棒不变性的特点,采用滑模变结构控制方法进行慢回路控制系统的设计。记w1=g22u+d1为慢回路总不确定性,则式(1)可改写为如下形式。
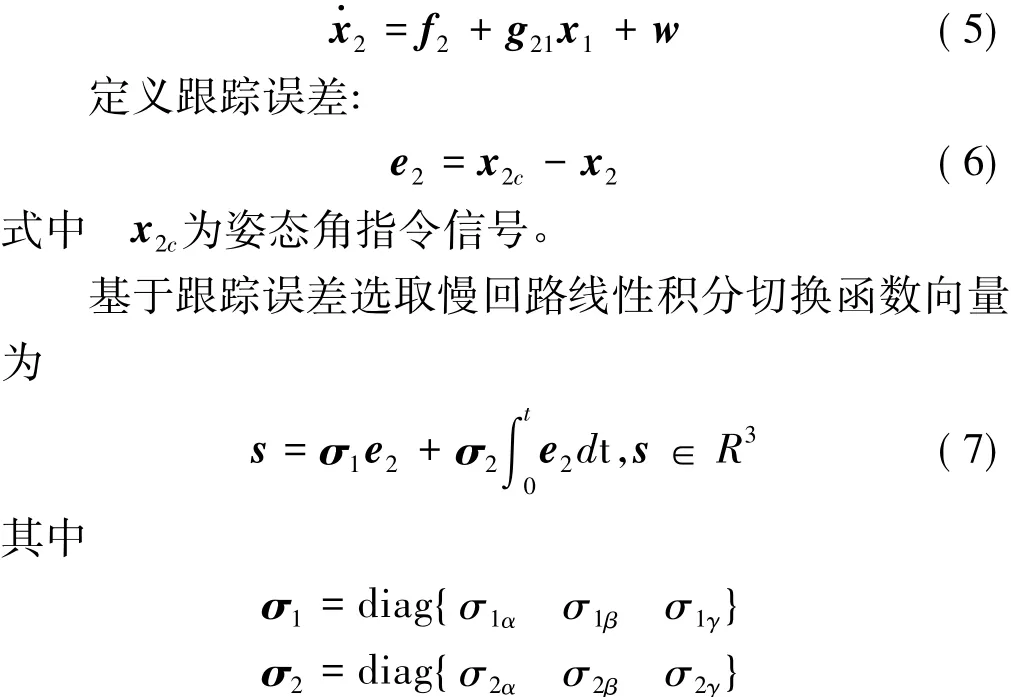
式中 σ1、σ2为正定增益矩阵,即 σij>0(i=1,2;j=α,β,γ)。
显然,跟踪误差在滑动模态s=0上渐近趋于零,而当s≠0时,需要设计控制器u使满足滑动模态到达条件<0。

2.1.3 扩张状态观测器设计
从式(10)中可以看出,当不确定项‖w1‖较大时,变结构控制将无法保证系统的稳定性,为此,需要对回路中的不确定项进行补偿。本文采用扩张状态观测器来估计w1,以提高整个控制系统的鲁棒性能[12]。
在变结构控制下,设计拦截器慢回路扩张状态观测器如式(11)所示:
函数fal(e,α,δ)是带有线性区的非光滑函数,其定义为
通过合理选取参数β01、β02可实现对w1的精确逼近,从而提高系统的鲁棒性。
2.2 基于最优控制的直接力误差修正设计
为了提高拦截器响应速度,一种比较直接的方法是通过直接力方法快速改变作用于拦截器上的力进而快速提高拦截器的响应速度。当直接力控制装置工作时,式(2)可变为
由于每个脉冲发动机直接力控制时间很短,可认为气动力控制不发生变化,则当气动力控制采用控制律(4)时,经过简单推导可以得到如下跟踪误差响应:

为使跟踪误差尽快趋于零同时最小化控制能量,采用最优控制的方法进行直接力控制设计。选择最优控制指标函数为
对于直接力控制,如何根据虚拟控制指令合理有效的产生发动机点火指令,对于最终的控制效果具有重要影响。结合发动机0-1工作的特点,采用文献[13]中的PSR产生脉冲调制信号进行发动机组点火设计,具体方法这里不再赘述。
3 仿真与分析
为验证论文设计算法的有效性,对其进行数字仿真。仿真中,仿真初值:α=5°,β=5°,γ=5°,ωz=0°/s,ωy=0°/s,ωx=0°/s;变结构控制器和扩张状态观测器的设计参数分别为 σ1=0.01,μ1=5,μ2=10,β01=100,β02=50,α0=0.5,δ=5h;舵系统时间常数选择为 τ=0.1;每个脉冲发动机工作时间20 ms,脉冲推力为2 100 N。
仿真步长选取为h=0.001。控制器设计中,变结构控制器参数:σ1=diag{0.8,0.8,0.8},μ1=diag{8,8.5},σ2=diag{0.01,0.01,0.01},μ2=10;最优控制误差修正设计中,选择 Q(t)为单位阵 I,R 为 0.2×I。

基于所设计控制器进行仿真研究时,在仿真过程中将直接力/气动力复合控制与纯气动力控制的控制效果进行仿真对比,仿真结果对比如图2~图6所示。
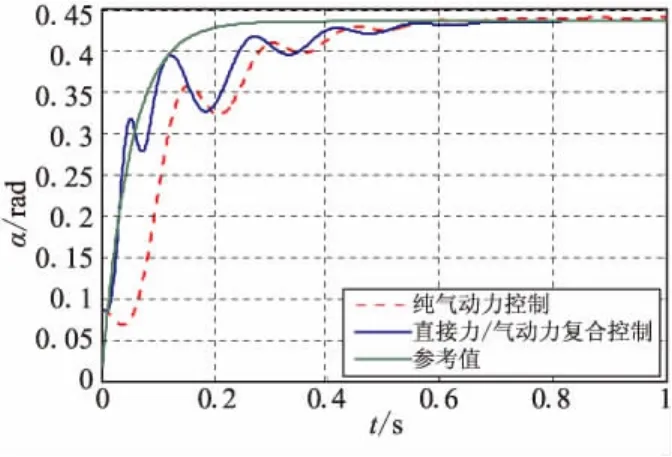
图2 攻角对比曲线Fig.2 Correlation curves for attack angle
从图2、图3仿真结果的对比可看出,采用直接力控制之后,控制系统的响应速度有了明显改善;从图4、图5仿真对比的结果可看出,采用直接力控制之后,气动力控制舵面偏转变得更为平缓;图6给出了发动机工作序列,从图中的仿真结果可看出,发动机点火装置能够给出正确的点火指令。综合可看出,采用直接力控制之后,系统的响应速度有所提高,整体控制性能变好。
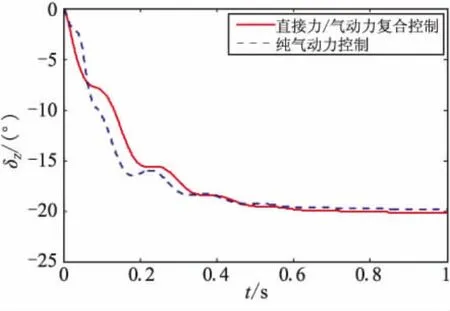
图4 俯仰舵偏角对比曲线Fig.4 Correlation curves for the pitch rudder
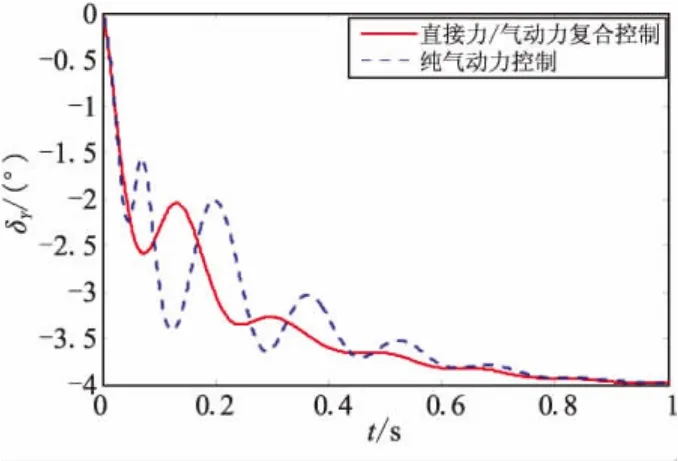
图5 偏航舵角对比曲线Fig.5 Correlation curves for the yaw rudder
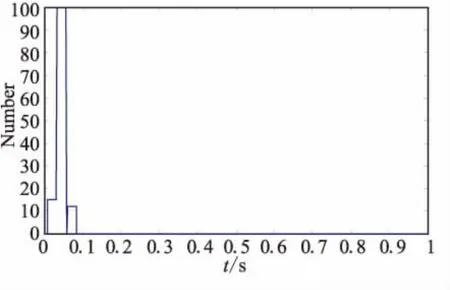
图6 发动机工作序列Fig.6 Work sequence for the pulse engine
4 结束语
研究了姿控式直接力/气动力复合控制问题,结合直接力控制与气动力控制各自的特点设计了一种基于误差修正的双层控制方法。利用带有扩张状态观测器的滑模变结构控制与动态逆控制相结合进行气动力控制设计,同时基于最优控制方法进行直接力控制设计实现跟踪误差快速修正,进而提高系统的响应性能。该方法的设计为直接力/气动力复合控制设计提供了一种新的思路。
[1]马克茂,赵辉,张德成.导弹直接侧向力与气动力复合控制设计与实现[J].宇航学报,2011,32(2):310-316.
[2]Ridgely D B,Lee Y,Fanciullo T.Dual aero/propulsive missile control[R].AIAA 2006-6570.
[3]Xing Li-dan,Zhang Ke-nan,Chen Wan-chun,et al.Optimal control and output feedback considerations for missile with blended aero-fin and lateral impulsive thrust[J].Chinese Journal of Aeronautics,2010,23:401-408.
[4]贺风华,马克茂,姚郁.基于输出预测的姿控发动机控制律优化设计[J].航空学报,2009,30(6):1131-1137.
[5]杨文骏,张科,张云璐.导弹的直接力/气动力控制系统设计[J].飞行力学,2012,30(4):349-353.
[6]支强,蔡远利.基于非线性干扰观测器的KKV气动力/直接力复合控制器设计[J].控制与决策,2012,27(4):579-583.
[7]邹晖,陈万春,殷兴良.具有侧向脉冲推力的旋转导弹建模与控制研究[J].系统工程与电子技术,2005,27(4):687-691.
[8]Brett Ridgely D,David Drakey,Louis Triplettz,et al.Dynamic control allocation of a missile with tails and reaction jets[C]//AIAA Guidance,Navigation and Control Conference and Exhibit,20-23 August 2007,Hilton Head,South Carolina.AIAA 2007-6671.
[9]Marc Bodson.Evaluation of optimization methods for control allocation[J].Journal of Guidance,Control,and Dynamics,2002,25(4):703-711.
[10]刘鹏云,孙瑞胜,李伟明.复合控制火箭弹脉冲点火算法研究[J].弹道学报,2012,24(4):27-30.
[11]Min Byung-Young,Lee Jae-Woo,Byun Yung-Hwan.Investigation of the shock interaction effect on the lateral jet controlled missile[C]//21st Applied Aerodynamics Conference,23-26 June 2003,Orlando,Florida.AIAA:2003-3932.
[12]韩京清.一类不确定对象的扩张状态观测器[J].控制与决策,1995,10(1):85-88.
[13]Menon P K,Iragavarapu V R.Adaptive techniques for multiple actuator blending[C]//Guidance Navigation and Control Conference and Exhibit,Boston,1998.
(编辑:吕耀辉)
Blended attitude control method with lateral thrust and aerodynamic force based on error compensation
SHAO Lei1,LEI Hu-min1,DUAN Chao-yang2,DING Yu-shan3
(1.The Air Force Engineering University,Aerial Defence and Antimissile Insitute,Xi'an 710051,China;2.China AirborneMissile Academy,Luoyang 471009,China;3.The Equipment Verifying Institute for Ground-to-Air Missile,Sanyuan 713800,China)
Based on the characteristic of lateral thrust control and aerodynamic,an error compensation based dual-layer blended attitude control method was investigated to deal with the blended attitude control with lateral thrust and aerodynamic force.The proposed control method carry through the aerodynamic force control based on the combination of variable structure control and dynamic inverse control,with the extended state observer employed to estimate and compensate the error.And then,the optimal control based lateral thrust control is proposed to realize the fast modification of error,which improves the response speed.The results show that the dynamic response characteristic of the missile can be improved by using the blended controller.
blended control;variable structure control;dynamic inverse control;extended state observer(ESO);optimal control
V448
A
1006-2793(2014)06-0769-05
10.7673/j.issn.1006-2793.2014.06.006
2013-08-30;
2013-11-13。
航空科学基金(20110196005)。
邵雷(1982—),男,博士,研究方向为非线性控制、飞行器制导与控制。E-mail:shaoleijing@126.com
雷虎民(1960—),男,博士/教授,研究方向为飞行器制导与控制。
段朝阳(1960—),女,博士/首席专家,研究方向为飞行器制导与控制。
猜你喜欢
制导与引信(2022年2期)2022-07-22
无人机(2022年2期)2022-05-20
轻兵器(2022年5期)2022-05-19
北京航空航天大学学报(2021年6期)2021-07-20
电脑知识与技术(2020年15期)2020-07-04
科技创新与应用(2019年17期)2019-06-09
财会学习(2018年2期)2018-01-24
科技视界(2015年20期)2015-01-16
科技致富向导(2013年21期)2013-12-10
中国教育信息化·高教职教(2009年1期)2009-03-10
