
吸气式高超声速飞行器鲁棒反演控制器设计①
2014-09-19 08:13卜祥伟吴晓燕陈永兴白瑞阳
固体火箭技术 2014年6期
卜祥伟,吴晓燕,陈永兴,白瑞阳
(空军工程大学防空反导学院,西安 710051)
吸气式高超声速飞行器鲁棒反演控制器设计①
卜祥伟,吴晓燕,陈永兴,白瑞阳
(空军工程大学防空反导学院,西安 710051)
针对吸气式高超声速飞行器气动/推进/结构弹性耦合控制问题,提出了鲁棒反演控制器设计方法。采用反演和动态逆方法设计虚拟控制量和实际控制量,通过引入一阶低通滤波器来获取虚拟控制量的导数,解决了虚拟控制量求导复杂问题;为了增强控制器的鲁棒性,采用充分光滑投影算子对模型非匹配不确定项进行估计和补偿,同时避免了可能出现的参数漂移问题。仿真结果表明,该控制器对模型气动参数拟合误差、攻角和升降舵偏角摄动、气动弹性影响具有鲁棒性,对速度指令和高度指令具有很好的跟踪效果。
吸气式高超声速飞行器;鲁棒反演控制;一阶低通滤波器;充分光滑投影算子
0 引言
吸气式高超声速飞行器通常是指以吸气式发动机为动力,可以在邻近空间以Mɑ>5的速度飞行的一类飞行器[1],其特殊的机体/发动机一体化设计,细长体气动外形布局和薄、轻质材料的大量使用,导致空气动力学、推进系统、结构动力学和气动热力学之间存在显著的交叉耦合效应[2-3]。显著的弹性效应和复杂的飞行环境使得飞行器动力学模型具有较大的不确定性,这给控制器的设计带来了极大的挑战[3]。
目前,国内对吸气式高超声速飞行器控制问题的研究大多采用NASA兰利研究中心开发的Winged-Cone刚体模型[4]。文献[5]利用鲁棒滑模观测器对模型不确定参数进行估计和补偿,设计了一种双环滑模控制器;文献[6]设计了一种自适应容错控制器;文献[7]针对控制量受限情况,设计了反演控制器。而国外学者更多关心的是弹性效应对飞行控制的影响,大多采用的是Bolender和Doman建立的一体化解析式模型[8],该模型充分考虑了弹性状态的影响,能够更加真实地反映出飞行器飞行过程中的气动/热/结构/推进耦合现象。文献[9]考虑弹性效应,设计了一种鲁棒自适应控制器,对飞行器弹性振动抑制效果较好;文献[10]设计了滤波器在线估计弹性振动频率,采用LQR方法进行跟踪控制。最近,国内也逐渐开始重视对弹性模型的控制研究[11-12],但抑制飞行过程中的弹性振动存在两个难题:一是飞行器没有分配控制权,不存在可设计的控制量;二是飞行器所受广义弹性力的拟合参数存在不确定性,且弹性状态不易测量。
本文将解决吸气式高超声速飞行器弹性模型的非线性鲁棒控制问题。传统PID控制和最优控制方法对被控对象精确数学模型依赖性较大,控制器鲁棒性差。变结构控制方法由于控制的不连续性往往伴随有较为严重的抖振,控制输出抖振则会进一步激发飞行器弹性状态和刚体状态的耦合效应。而反演设计方法则特别适合处理高超声速飞行器这一类存在非匹配不确定项的系统。本文采用反演和动态逆方法设计控制器,将模型气动参数拟合误差、弹性形变引起的机体攻角和升降舵偏角摄动以及弹性状态对刚体状态的影响转化为有上界不确定参数问题,通过引入充分光滑投影算子对不确定参数进行估计和补偿,解决了单纯动态逆方法鲁棒性不强的问题,引入一阶低通滤波器来简化虚拟控制量的求导运算。最后,通过实例仿真对所设计控制器的有效性进行验证。
1 高超声速飞行器模型及不确定分析
1.1 纵向运动学方程
吸气式高超声速飞行器控制系统的主要任务是通过调节燃料-空气比φ和升降舵偏角δe,在纵向平面内实现对速度参考指令vref(t)和高度参考指令href(t)的稳定跟踪。吸气式高超声速飞行器纵向运动学方程为

式中 T、D、L和M分别为飞行器所受推力、阻力、升力和俯仰力矩;刚体状态量分别为速度v、高度h、攻角α、弹道角 γ和俯仰角速度 Q;η为弹性状态量,η=分别为前三阶弹性状态的阻尼和振动频率;μ和RE分别为地球引力常数和半径;m为飞行器质量;Ni(i=1,2,3)为广义弹性力;Iyy为飞行器转动惯量。
对模型(1)的气动力(矩)和推力进行参数拟合[13]:
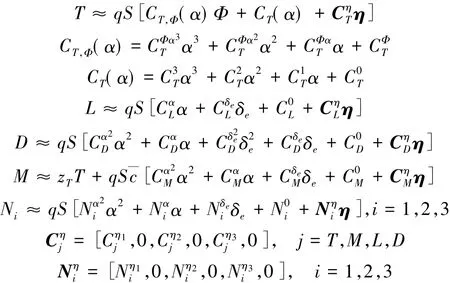
式中 q=ρv2/2为动压;ρ为高度h处的空气密度;S为飞行器参考面积;为飞行器平均气动弦长;zT为推力力矩耦合系数。
1.2 模型不确定分析
吸气式高超声速飞行器独特的外形结构导致飞行过程中弹性效应显著。机体弯曲振动会改变前体和升降舵下表面的激波结构而造成机体表面和升降舵局部流动攻角摄动,甚至引起空气质量溢流,严重影响发动机性能。将摄动攻角分别在机体前端和升降舵转轴处按最大值处理为

推力、阻力、升力和俯仰力矩的拟合参数摄动范围取为εi,i=T,D,L,M。考虑到弹性状态不易测量,且没有相应的执行机构去进行抑制,将弹性状态对刚体状态的影响计入模型不确定项,则模型(1)中 v、α、γ、Q子系统因拟合参数摄动引入的误差为

2 控制器设计
2.1 速度控制器设计



3 实例仿真
为了验证所设计控制器的有效性,针对吸气式高超声速飞行器模型(4)进行闭环系统仿真,模型气动参数见文献[13]。弹性状态阻尼 ζ=0.02(i=1,2,3),弹性振动频率 ω1=20.2 rad/s,ω2=48.4 rad/s,ω3=95.6 rad/s。飞行器初始速度v=2 331.7 m/s,初始高度h=26 212.8 m。保持飞行动压q=90 148 Pa不变,速度阶跃 Δv=228.9 m/s,高度阶跃 Δh=1 219.2 m。高度参考输入由阻尼为0.95、自然频率为0.03 rad/s二阶参考模型给出,速度参考输入通过vref(t)={2q exp[(href(t)-h0)/hs]/ρ0}1/2给出,其中 ρ0为高度 h0处的空气密度。
采用定步长的四阶Runge-Kuta法数值求解,步长选为 0.01 s,取 dv=0.8 sin(0.01πt),dγ=dα=0.2 sin(0.01πt),dQ=0.15 sin(0.01πt)。控制器参数取为kv,1=1.1,kv,2=1,kh,1=1.6,kh,2=0.6,kγ,1=1,kγ,2=0.2,kα,1=1.4,kα,2=0.5,kQ,1=1,kQ,2=0.3,c1=c2=1。滤波器参数取为τ1=τ2=τ3=0.05。充分光滑投影算子参数取为 Γv=Γγ=Γα=ΓQ=1,δ=1,σ=0.5,m—=3。
仿真结果如图1~图6所示。从仿真结果可以看出,控制器能够较好地克服模型不确定项的影响,速度跟踪误差能够迅速收敛到零,高度跟踪误差也能够迅速收敛到一个包含零点的很小邻域内,且大约在80 s内收敛到零,弹道角、攻角和俯仰角速度以及前三阶弹性状态都能趋于平衡状态,系统控制量Φ和δe始终都能维持在合理的范围内,且控制输出无抖振。
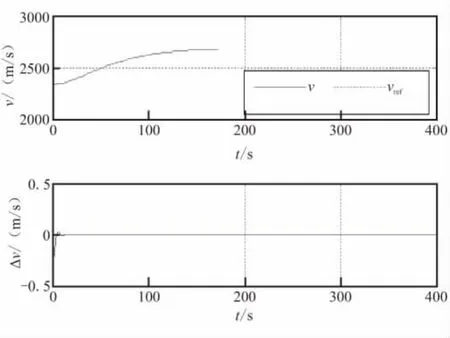
图1 速度跟踪曲线和跟踪误差Fig.1 Velocity trajectory tracking curve and tracking error
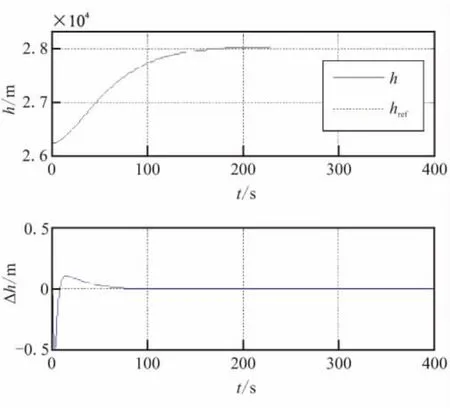
图2 高度跟踪曲线和跟踪误差Fig.2 Altitude trajectory tracking curve and tracking error
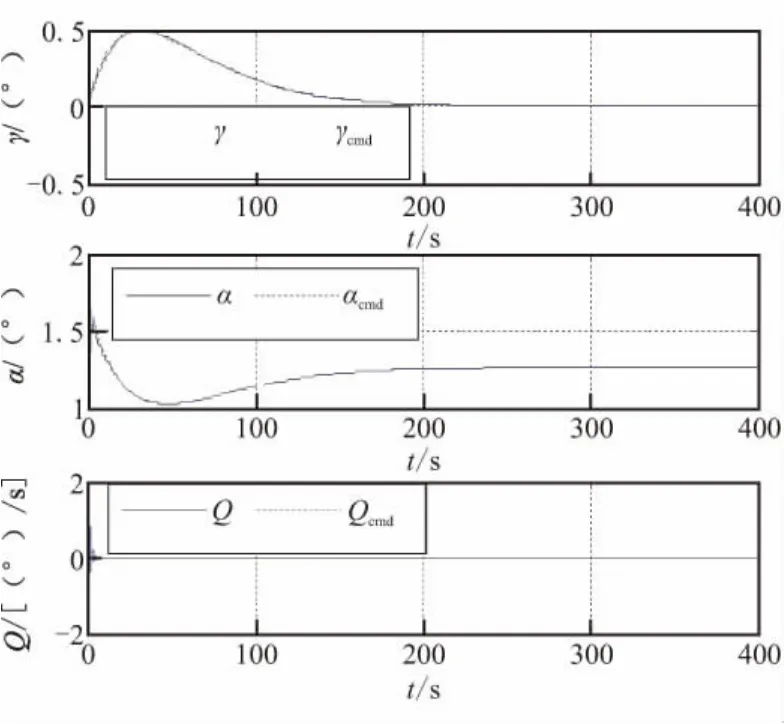
图3 弹道角、攻角和俯仰角速度响应曲线Fig.3 Angle of attack,angle of elevator and pitch rate response curves
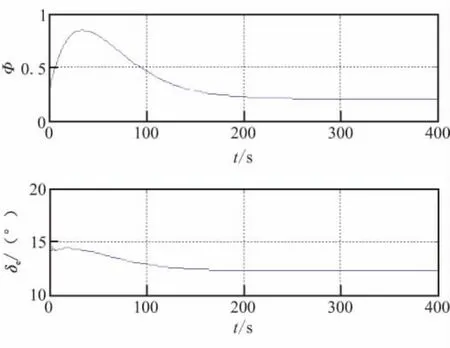
图4 控制器输出曲线Fig.4 Controller output curves

图5 弹性状态响应及变化率曲线Fig.5 Elastic states response and change rate curves
图6为充分光滑投影算子对模型不确定项的估计曲线。从图6可看出,充分光滑投影算子可较精确地估计模型的不确定项,且不存在参数漂移现象,从而显著增强控制器的鲁棒性。
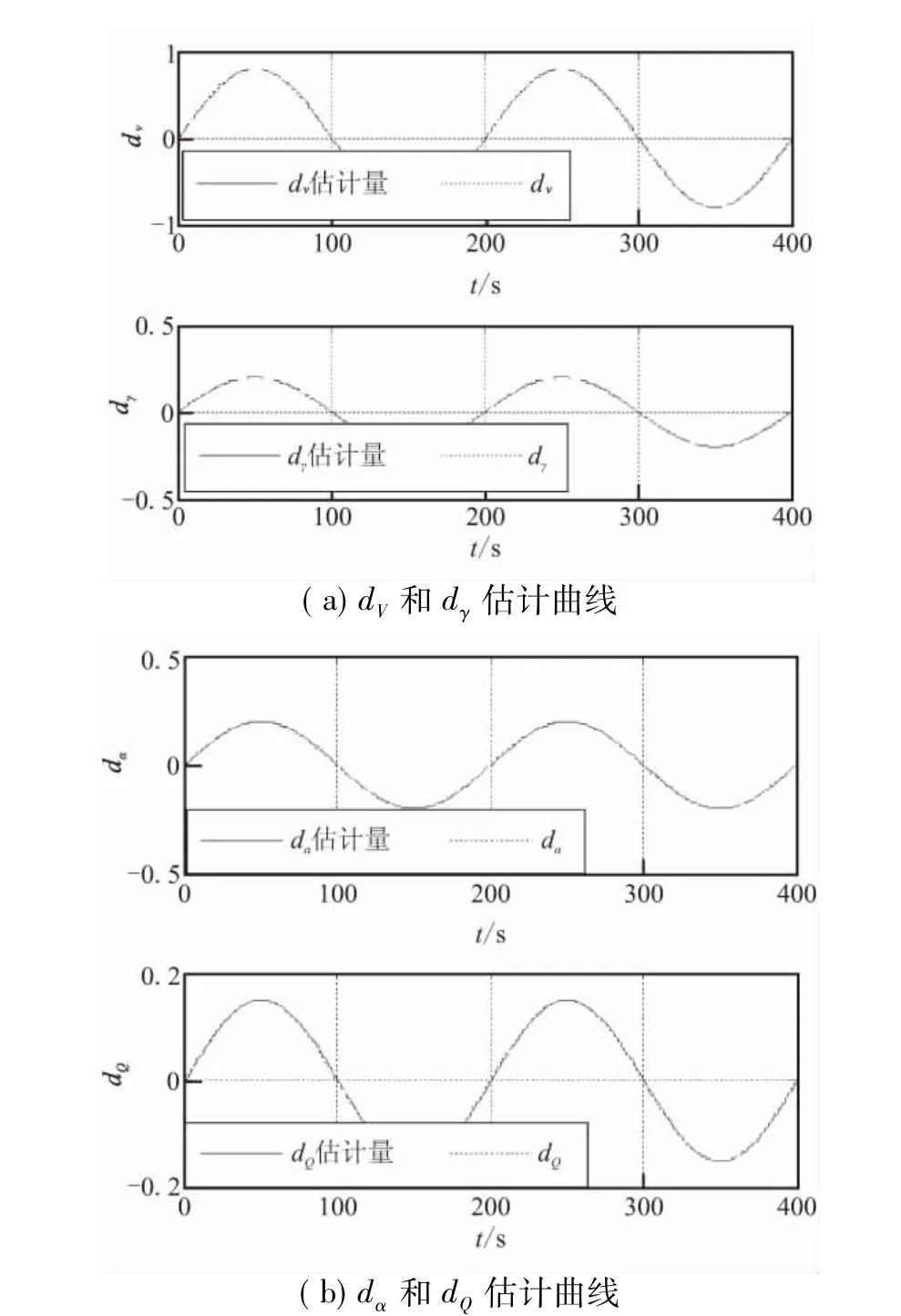
图6 模型不确定项估计曲线Fig.6 Model uncertainties estimate curves
4 结论
(1)提出了针对吸气式高超声速飞行器气动弹性模型的鲁棒反演控制方法。在控制器设计过程中引入一阶低通滤波器来获取虚拟控制量的导数,消除了传统反演设计中“微分膨胀”问题;通过引入充分光滑投影算子,从而保证了控制器对模型上界已知的不确定项的鲁棒性,且放宽了传统投影算子要已知不确定项上、下界的要求。
(2)仿真结果表明,系统状态能够稳定地跟踪速度和高度参考指令,对飞行器参数拟合误差、攻角和升降舵偏角摄动以及气动弹性影响等不确定项具有较强的鲁棒性。
[1]Hank J M,Murphy J S,Mutzman R C.The X-51A scramjet engine flight demonstration program[C]//Proceedings of 15th AIAA International Space Planes and Hypersonic System and Technologies Conference.Reston,VA,USA:AIAA,2008:1-13.
[2]Alicia Zinnecker,Andrea Serrani.Combined reference governor and anti-windup design for constrained hypersonic vehicles models[R].AIAA 2009-6283.
[3]Vaddi S S,Sengupta P.Controller design for hypersonic vehicles accommodating nonlinear state and control constraints[R].AIAA 2009-6286.
[4]John D,Shanghnessy S,Zane Pinckey,et al.Hypersonic vehicle simulation model:winged-cone configuration[R].NASA TM 102610,1990.
[5]宋超,赵国策,陈洁.基于鲁棒滑模观测器的高超声速飞行器双环滑模控制[J].固体火箭技术,2012,35(4):438-441.
[6]宋超,赵国策,刘旭.高超声速飞行器的自适应容错控制[J].固体火箭技术,2012,35(5):593-596.
[7]时建明,王洁,叶继坤,等.吸气式高超声速飞行器输入受限自适应反演控制[J].固体火箭技术,2012,35(5):573-577.
[8]Michael A Bolender,David B Doman.A non-linear model for the longitudinal dynamics of a hypersonic air-breathing vehicle[R].AIAA 2005-6255.
[9]Lisa Fiorentini,Andrea Serrani,Michael A.Bolender,et al.Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicles[J].Journal of Guidance,Control,and Dynamics,2009,32(2):401-416.
[10]Levin J,Ioannou P A,Mirmirani M D.Adaptive model suppression scheme for an aeroelastic air-breathing hypersonic cruise vehicle[R].AIAA 2008-7137.
[11]葛东明.临近空间高超声速飞行器鲁棒变增益控制[D].哈尔滨:哈尔滨工业大学,2011.
[12]时建明,王洁,王琨,等.吸气式高超声速飞行器纵向运动反演控制器设计[J].西安交通大学学报,2013,47(3):102-107.
[13]Lisa Fiorentini.Nonlinear adaptive controller design for airbreathing hypersonic vehicles[D].Columbus:The Ohio State University,2010.
[14]Xuejing Cai.Fault detection/isolation and fault tolerant control for hypersonic vehicle[D].Carolina:North Carolina State University,2010.
[15]Cai Z,M S de Queiroz,D M Dawson.A sufficiently smooth projection operator[J].IEEE Trans.on Automatic Control,2006,51(1):135-139.
(编辑:吕耀辉)
Robust backstepping controller design for air-breathing hypersonic vehicles
BU Xiang-wei,WU Xiao-yan,CHEN Yong-xing,BAI Rui-yang
(Air and Missile Defense College,Air Force Engineering University,Xi’an 710051,China)
A robust backstepping controller was designed for air-breathing hypersonic vehicles with aerodynamics,propulsion and structural flexible dynamics couplings.Virtual and actual control items were designed based on backstepping and dynamic inversion design procedure.To omit analytic calculation of the virtual control item derivatives,which was very difficult to evaluate in the traditional backstepping control,low-pass first order filter was introduced.In order to enhance robustness of the controller,a sufficiently smooth projection operator was employed to estimate and compensate the model unmatched uncertainties,thus avoiding possible parameters drift.Simulation results show that the designed controller is robust to model aerodynamics fitting errors,angle of attack and elevator perturbation and the influence of aeroelasticity,and achieves an excellent tracking performance of velocity and altitude trajectories.
air-breathing hypersonic vehicles;robust backstepping controller;low-pass first order filter;sufficiently smooth projection operator
V448
A
1006-2793(2014)06-0743-06
10.7673/j.issn.1006-2793.2014.06.002
2013-10-18;
2013-11-25。
陕西省自然科学基础研究计划资助项目(2012JM8020)。
卜祥伟(1987—),男,博士生,研究方向为飞行器建模与控制。E-mail:buxiangwei1987@126.com
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
军事运筹与系统工程(2020年2期)2020-11-16
北京航空航天大学学报(2019年9期)2019-10-26
北京航空航天大学学报(2017年5期)2017-11-23
太空探索(2016年7期)2016-07-10
现代防御技术(2016年1期)2016-06-01
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
