某舰载雷达自动锁的结构设计
2014-09-05 06:50顾立彬
机械设计与制造工程 2014年3期
顾立彬
(中国电子科技集团公司 第二十研究所, 陕西 西安 710068)
某舰载雷达自动锁的结构设计
顾立彬
(中国电子科技集团公司 第二十研究所, 陕西 西安 710068)
舰载雷达稳定平台系统能消除舰船纵横摇对雷达天线产生的影响。自动锁是某舰载雷达稳定平台纵摇机构、横摇机构的锁定机构。首先提出自动锁的设计指标;然后根据设计指标对自动锁的结构进行了详细的设计,主要包括传动形式的选择、锁舌行程计算、推拉力计算和开闭锁时间的计算;最后对自动锁进行了环境适应性设计,主要包括密封设计和防腐设计。
自动锁;舰载雷达;稳定平台
舰艇在水面航行时会发生纵摇、横摇、升沉以及航向的改变,特别是纵摇、横摇和航向的改变,对雷达的影响最大,因此给雷达天线座的设计带来了特殊的问题——稳定问题。针对舰载雷达天线座的稳定问题应设计机械稳定平台[1]。
自动锁是稳定平台系统内的锁定装置,安装于稳定平台的外围,由于某些雷达安装位置低,海上风浪大,工作环境恶劣,所以自动锁性能的安全可靠对舰载雷达的正常工作起着至关重要的作用。
1 稳定平台原理和自动锁设计指标
1.1稳定平台工作原理
如图1所示。稳定平台有2根轴,横摇轴与舰首尾线平行,纵摇轴与舰首尾线垂直。在纵摇轴和横摇轴上各有1套伺服驱动装置和轴位传感器。

图1 稳定平台原理图
1.2自动锁设计指标
a.锁舌行程要求:≥18mm。
b.自动锁锁舌可以承受200N的插拔力。
c.开、闭锁时间:≤10s。
d.自动锁装有电气部件的腔体应满足防水式密封要求,外露部分应选用耐腐蚀材料。
2 自动锁的设计
2.1传动形式的选择
如图2所示,自动锁主要由蜗轮蜗杆传动机构、齿轮齿条传动机构、限位机构和驱动电机等部分组成。这种形式具有结构简单、可靠性高、密封效果好等优点[2]。
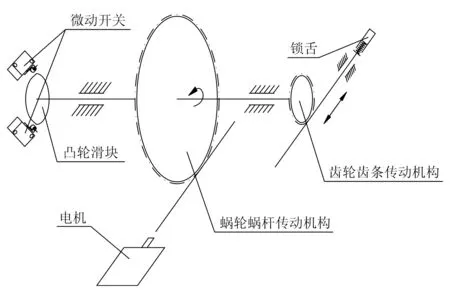
图2 自动锁原理图
自动锁工作时,直流力矩电机通过弹性联轴器驱动蜗杆蜗轮传动机构运动,蜗轮与齿轮同轴固定,进而带动齿轮齿条机构运动,齿条通过弹簧的弹性力使锁舌伸出,插入稳定平台的锁孔内,即完成锁定任务。蜗轮轴后端固定有凸轮滑块,凸轮滑块转动碰触微动开关,对锁头的行程和往返进行控制,实现开锁和闭锁。
2.2指标分配计算
2.2.1锁舌行程计算
根据自动锁技术指标要求,锁舌行程大于18mm,选择蜗轮蜗杆的传动比为i1=105;齿轮的齿数为z1=21,模数为m=1.0。详细参数见表1。
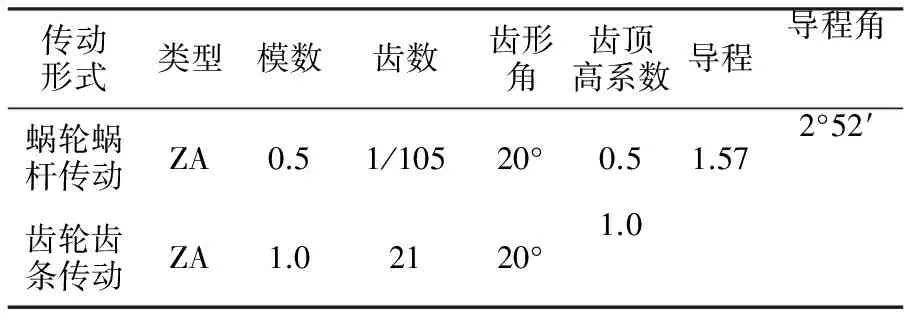
表1 传动机构参数
2.2.2推拉力计算
根据雷达自动锁的技术指标要求,自动锁锁舌在承受200N的插拔力作用时应能正常工作,由此依次向后推导电机所需力矩。自动锁受力分析如图3所示。
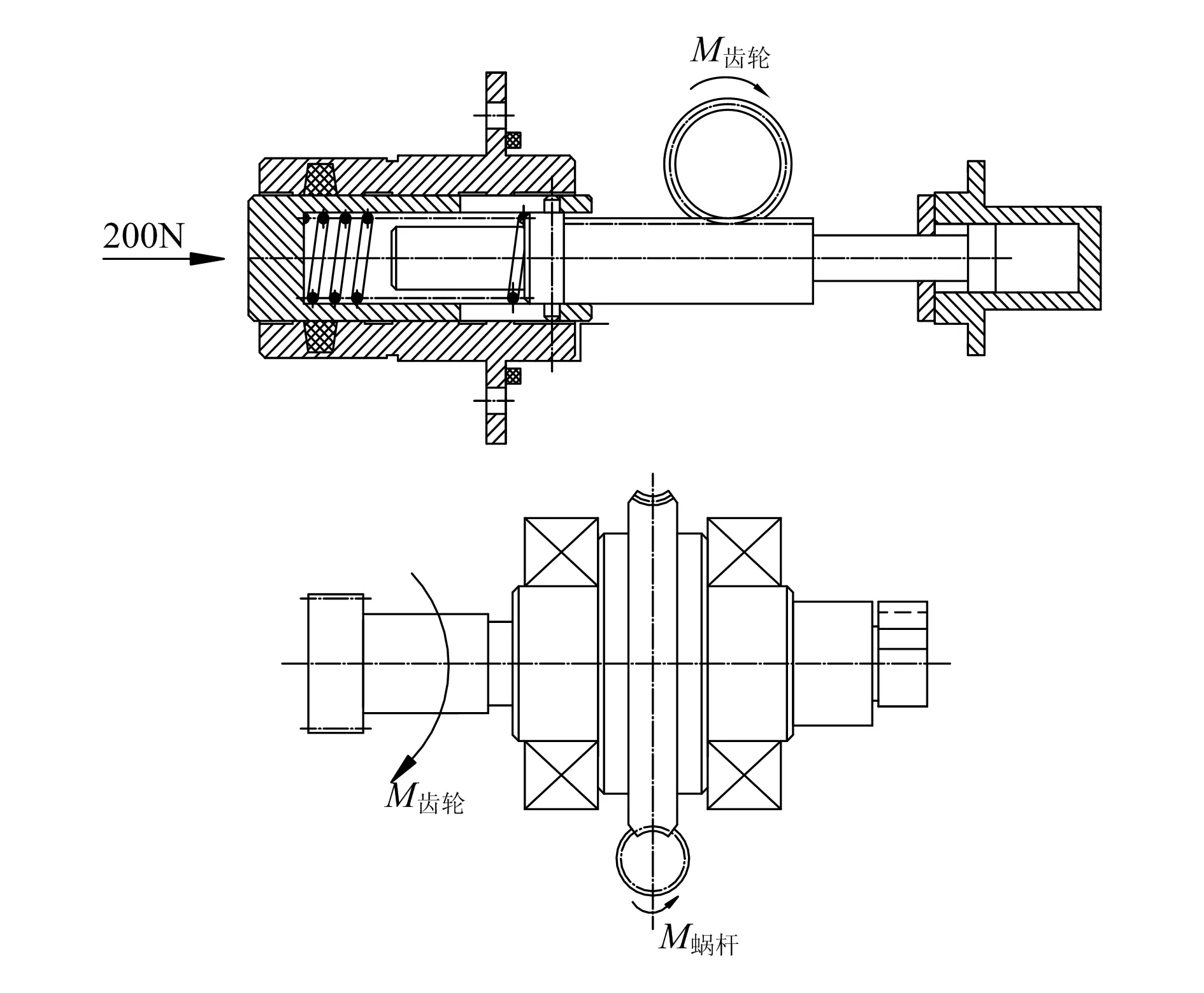
图3 自动锁受力分析图
自动锁的锁舌承受200N的推力,其通过弹簧将推力作用在齿条上,齿条与齿轮啮合,最终将作用力转换成齿轮上的转矩。齿轮与蜗轮同轴固定,则蜗杆上需要的传动力矩为(取g=10m/s2):
式中:M蜗杆为蜗杆上所需转矩;M齿轮为齿轮上所需转矩;η1为齿轮齿条的传递效率,η1=0.94;η2为蜗轮蜗杆的传递效率,η2=0.40;i为蜗轮蜗杆的传动比,i=105;F为自动锁锁舌承受的推力,F=200N;R齿轮的公称半径,R=10.5mm。
考虑锁舌与套筒、毛毡的摩擦力,蜗轮轴与旋转油封的摩擦力,以及环境中可能出现的冲击现象,取安全系数为a=1.5,则电机所需的转矩为:
M电机=aM蜗杆=0.08N·m
2.2.3开、闭锁时间计算
电机选择成都906厂生产的永磁直流力矩电动机J30LYX12, 电机的连续力矩为0.12 N·m,大于电机所需转矩0.08 N·m,电机的性能曲线如图4所示(阴影部分为电机连续工作区域)。

图4 电机性能曲线图
当电机转矩为最大转矩0.08N·m时,转速为300r/min,则自动锁开、闭锁时间为:
2.3环境适应性设计
自动锁的工作环境为海洋潮湿环境,并且在露天环境下工作,为了保证其内部电器元件正常工作,主要考虑密封设计和防腐蚀设计[3]。
2.3.1密封设计
自动锁的密封分为两种情况:一种为静密封,一种为动密封。
静密封可采用一般的O型密封圈或密封垫两种方式密封,并在端面涂抹密封胶,其密封等级可以达到防水式密封。
动密封存在两种情况:一种是锁舌与套筒之间的直线运动密封;一种是旋转轴与壳体之间的旋转密封。如图5所示锁舌与套筒之间的直线运动密封通过毛毡实现,主要防止液态水和灰尘进入齿轮腔体内。

图5 动密封
旋转轴与壳体之间的旋转密封采用德氏封的MA47旋转密封圈密封。MA47旋转密封圈是以聚四氟乙烯为材料主体,以金属张力弹簧作为预压力的U形密封圈,密封性能好,并具有较低的摩擦力,其密封等级可以达到防水式密封。
2.3.2防腐蚀性设计
防腐蚀性设计主要是对零部件材料的选择,以及对零部件涂镀处理工艺的选择。该自动锁的壳体均采用5A06防锈铝机械加工而成,并经化学氧化处理(Ct·O);锁舌、齿轮和齿条等零件选用1Cr18Ni9Ti机械加工而成。
旋转密封圈将自动锁内的腔体分为两个腔体,即齿轮腔体和密闭腔体。齿轮腔体内部的零部件均采用1Cr18Ni9Ti机械加工而成,防锈蚀性能好,允许进入少量的水汽;密闭腔体为防水式密封,保证了内部蜗轮蜗杆传动机构和电器部分的正常工作。
3 结束语
本文首先提出了在舰载雷达设计过程中一个至关重要的问题——稳定问题。针对该问题,本文分别从传动形式、锁舌行程、推拉力和开、闭锁时间几个方面设计了一种新型自动锁,为了解决其工作环境恶劣的问题,对其进行了环境适应性设计。目前该自动锁已经通过了环境试验,各项技术指标均满足设计要求。
[1] 吴凤高.天线座结构设计[M].西安:西北电讯工程学院出版社,1986.
[2] 张润逵,戚仁欣,张树熊,等.雷达结构与工艺(上册)[M].北京:电子工业出版社,2007:400-404.
[3] 平丽浩,黄普庆,张润逵,等.雷达结构与工艺(下册)[M].北京:电子工业出版社,2007:268-277,294-308.
TheStructureDesignofanAutomaticLockonShipboardRadar
GU Libin
(The 20th Research Institute of CETC, Shaanxi Xi 'an, 710068, China)
A stable platform system of shipboard radar can eliminate the effect of ship roll and pitch of the radar antenna. An automatic lock is a locking mechanism of the rolling and pitching mechanism on shipboard radar stable platform. This paper proposes the design goals of the automatic lock, shows the detail about the structure of an automatic lock such as the choosing of transmission, the calculating of bolt traveling and push-pull force and opening, and closing locking time. It also puts forward the environmental adaptive design of the automatic lock, sealing and preventing corrosion.
Automatic Lock; Shipboard Radar; Stable Platform
10.3969/j.issn.2095-509X.2014.03.016
2014-01-02
顾立彬(1986—),男,河北任丘人,中国电子科技集团公司第二十研究所助理工程师,硕士,主要从事雷达天线座传动设计与分析工作。
TN959.1
B
2095-509X(2014)03-0062-03
猜你喜欢
机械设计与制造工程(2021年3期)2021-04-16
微特电机(2021年6期)2021-03-07
陕西理工大学学报(自然科学版)(2020年6期)2021-01-15
设备管理与维修(2020年20期)2020-11-17
水运工程(2020年2期)2020-02-26
中国特种设备安全(2019年8期)2019-10-14
物流技术与应用(2019年6期)2019-07-16
经济技术协作信息(2018年20期)2019-01-19
水利科技与经济(2016年7期)2016-04-25
重型机械(2016年1期)2016-03-01