一种基于单目视觉和激光点的测距方法
2014-09-05 06:50邓星宇朱兴龙
机械设计与制造工程 2014年3期
邓星宇,朱兴龙,王 超
(扬州大学 机械工程学院,江苏 扬州 225127)
一种基于单目视觉和激光点的测距方法
邓星宇,朱兴龙,王 超
(扬州大学 机械工程学院,江苏 扬州 225127)
建立一种基于单目视觉和激光点的测距模型。首先由三坐标测量机测量激光点在物体上的位置信息,采用图像处理该物体上激光点在单目CCD图像上的位置信息,建立一一对应关系,然后移动物体,使CCD图像上的激光点发生变化,得到多组对应的数据。根据这些数据,利用分段曲线拟合方法,建立了实验模型。根据建立的模型,进行一定范围内的距离测量,并与三坐标测量的结果比较,验证了这种方法的可行性,为移动机器人自主避障提供了条件。
单目视觉测量;分段曲线拟合;测距模型;机器人
自从20世纪80年代以来,随着计算机和新型传感器技术的迅猛发展,移动机器人在运动结构、环境感知、多传感融合、视觉以及智能导航等领域都取得了大量的研究成果。随着图像采集设备性能不断提升,价格的持续下降,使利用摄像机作为传感器成为了可能,并且图像处理和计算机视觉领域的飞速发展,也为视觉在移动机器人的应用提供了坚实的理论基础。视觉信息的获取主要有单目、双目和多目几种方式。单目视觉由于结构简单,测量灵活,被广泛地研究和应用。文献[1]~[3]介绍了仅使用1台摄像机即可测量出目标物相对摄像机的三维姿态数据和三维位移数据。
单目视觉测距是利用单个摄像机拍摄的图像获取深度信息,按照测量的原理主要分为两种测量方法:基于已知物体和基于已知运动。基于已知物体的测量方法是指在已知物体信息的条件下利用摄像机所获取的目标图像,由此得到其深度信息。此类方法多用于视觉导航与定位。文献[4]采用人工标记法建立地图,利用单个摄像机采集到的图像进行分析处理,由此来定位摄像机所在的位置;文献[5]研究了基于单个摄像机的视觉导航,该研究实现了移动机器人在已知的环境下对目标物进行识别和抓取;文献[6]介绍了一种基于单目视觉的移动机器人智能控制系统,该系统实现了目标物的定位、拾取及搬运。基于已知运动的测量方法是指根据摄像机的移动信息以及获取的图像得到目标物的深度信息。文献[7]中介绍了一种单目视觉测距的新方法,其原理是利用摄像机采集到物体运动前后两幅图像比例的变化得出摄像机与目标物之间的距离,在文献[8]~[9]中测量了不同纹理下的目标物,验证了文中标定算法的良好性能。在此基础上,文献[10]根据多幅图像建立的模型预测了目标物的深度信息。
对上述的研究进一步分析可以发现,研究都采用的是一种“顺”序的研究思路:先推导出成像的几何模型,再根据此模型计算距离。他们都有共同的特点:基于小孔成像模型或透镜成像模型,在理想光路的前提下,研究投影几何关系,并采用了众多假设以简化问题,如摄像机水平放置、道路为直路、路面为水平等,这些假设在实际应用中却很难实现。本文基于一种“逆”向的研究思路:先获取距离样本点与成像中心坐标之间一一对应关系,再用数据拟合的方法建立该映射关系对应的测距模型。
1 数据拟合建模原理及其方法
在建模分析中,常常会遇到两类变量:一类带有“原因”性质,称为自变量,另一类带有“结果”性质,称为因变量。通过一组实验数据,研究两类变量之间的关系,从而建立起一个数学模型。应用所得模型进行因果关系分析或者用于预测、优化与控制等其他目的,这就是数据拟合要研究的主要内容。
数据拟合的主要功能是寻求平滑的曲线来更好地表现带有噪声的测量数据,从这些测量数据中寻求两个函数变量之间的关系或者变化趋势,最后得到数据拟合的函数式y=f(x)。最常用的是多项式曲线拟合,或称为最小二乘法,其设定曲线拟合的目标是最小方差,最后得到拟合曲线:
(1)
然而当数据点较多时,多项式阶数太低,拟合精度和效果不好,要提高拟合精度就需要提高曲线阶数,但阶数太高又带来计算上的复杂性及其他方面的不利。因此,如果只采用一种多项式曲线函数拟合较多的数据点,难以取得较好的拟合精度和效果。为有效地解决上述问题,一般采用分段曲线拟合。
分段曲线拟合的基本原理是先根据数据分布的特点,确定分段数目以及相应拟合曲线类型。拟合函数一般可选为多项式函数,因为在一定范围内,连续函数可用多项式任意逼近,然后再应用最小二乘法原理求得各分段拟合方程的系数。
2 单目视觉测距实验平台组成
2.1实验平台的硬件
实验平台的硬件由几个不同功能模块的部件组合而成。它包括三坐标测量机、六自由度位姿调节平台、标靶、激光源和摄像机等5个部分,如图1所示。

图1 标定平台硬件
三坐标测量机是一种多用途、高效率的精密型长度计量仪器。本文三坐标测量机采用Daisy8106H,其测量范围为x:800,y:1 000,z:600(单位:mm),示值误差为(1.7+L/330)μm。
六自由度位姿调节平台可以实现x轴、y轴和z轴的移动以及绕x轴、y轴和z轴的转动。本实验主要采用六自由度位姿调节平台调节标靶和摄像机的姿态及各自沿y轴方向的位移。
本实验摄像机为Panasonic(松下)WV-BP330系列的产品,图像采集卡是凌智公司的产品,型号为PIH-309E。
2.2实验平台的软件
a.测量软件AC-DMIS:AC-DMIS测量软件是三坐标测量机配套软件,它提供了机器运动控制、基本几何量测量等多种功能。本实验应用该软件的机器运动控制和基本几何测量(点测量)两个功能。
b.图像采集MATROX:本实验采用Matrox Intellicam图像采集软件进行图像采集,该软件可以实时显示目标物体的图像,可以对目标物体拍照并存储。
c.步进电机控制:本实验选择的是57BYGH803B型步进电机,步进电机驱动器是BL-210,利用该驱动器细分,使步进电机的步距角为0.9°。本实验利用VC++编写的程序来控制六自由度位姿调节平台系统。
3 实验与结果分析
3.1标定实验
首先将标靶的姿态通过相应机构调节出所需的姿态,并将y轴方向调整与三坐标测量机坐标系y轴方向一致。再将摄像机CCD成像面方位调节与三坐标测量机坐标系一致。利用三坐标测量机测出摄像机和标靶的原始位置,同时采集此时激光源照射在标靶上光斑的图像。然后六自由度位姿调节平台沿y轴方向移动标靶的位置,移动的距离为20mm,移动方向为靠近摄像机,并采集此时标靶上光斑的图像。重复上述操作15次,并得到15幅图像。当标靶台移至其极限位置时,六自由度位姿调节平台沿y轴方向移动摄像机的位置,移动的距离仍为20mm,移动方向为靠近标靶台,采集此时标靶上光斑的图像。重复上述操作4次,得到4幅图像。图2为本实验采集的19幅图像。
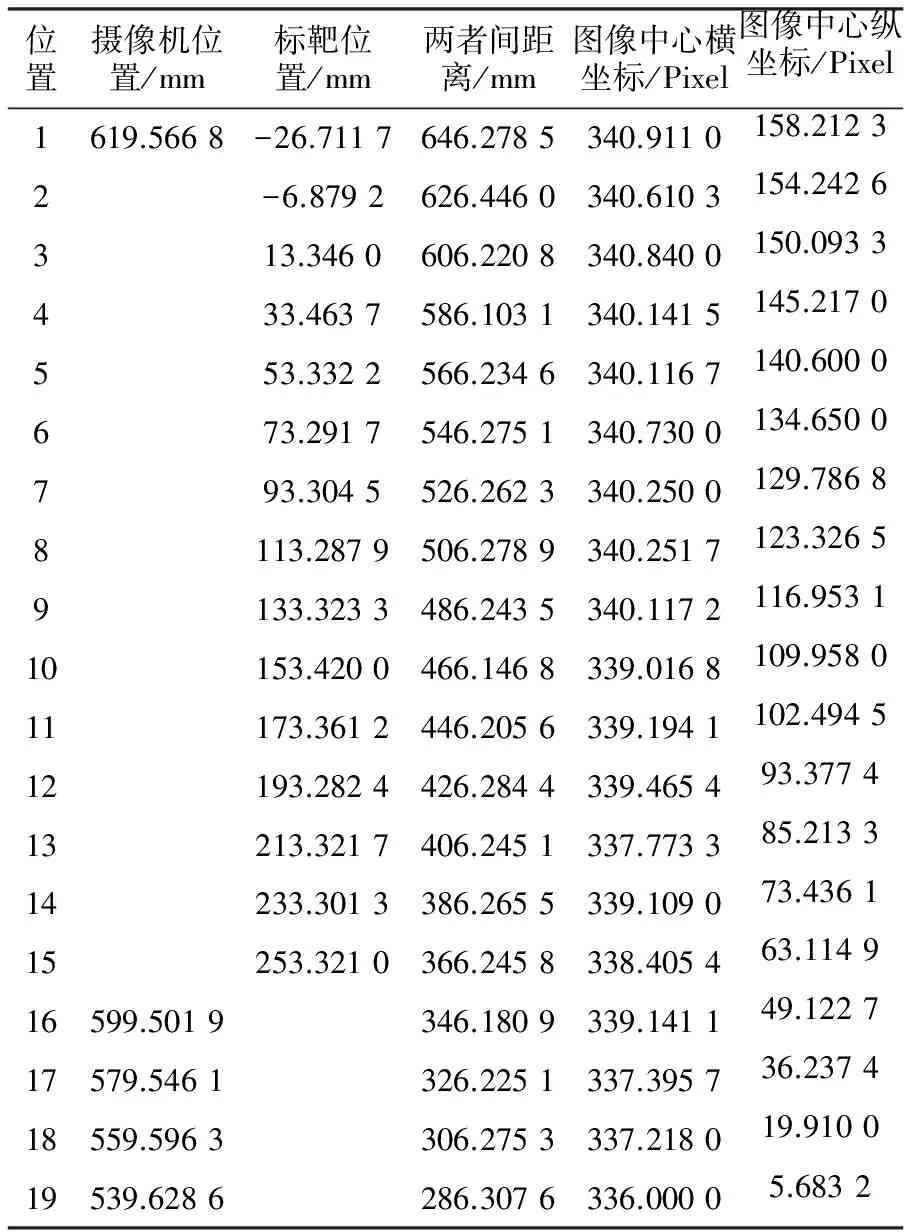
对采集好的19幅图像进行图像处理并得到每幅图像光斑的中心坐标,图像中心坐标采集数据见表1。
3.2分段曲线拟合
由于摄像机镜头畸变和激光光源的散射,有些图像中心横坐标变化较大,而本实验是以图像中心横坐标基本保持不变为前提的,寻求图像中心纵坐标与对应距离之间的映射关系。因此将“漂移”的点剔除(即位置12以后的点),将前12组数据分成2部分,将第一到第六组数据分为第一部分,再将第六到第十二组数据分为第二部分。前一段末尾的数据为下一段数据的首位,这样便保证了数据分段的连续性。经试验,取公式(1)多项式为二次多项式进行拟合较为适当。该表达式为:
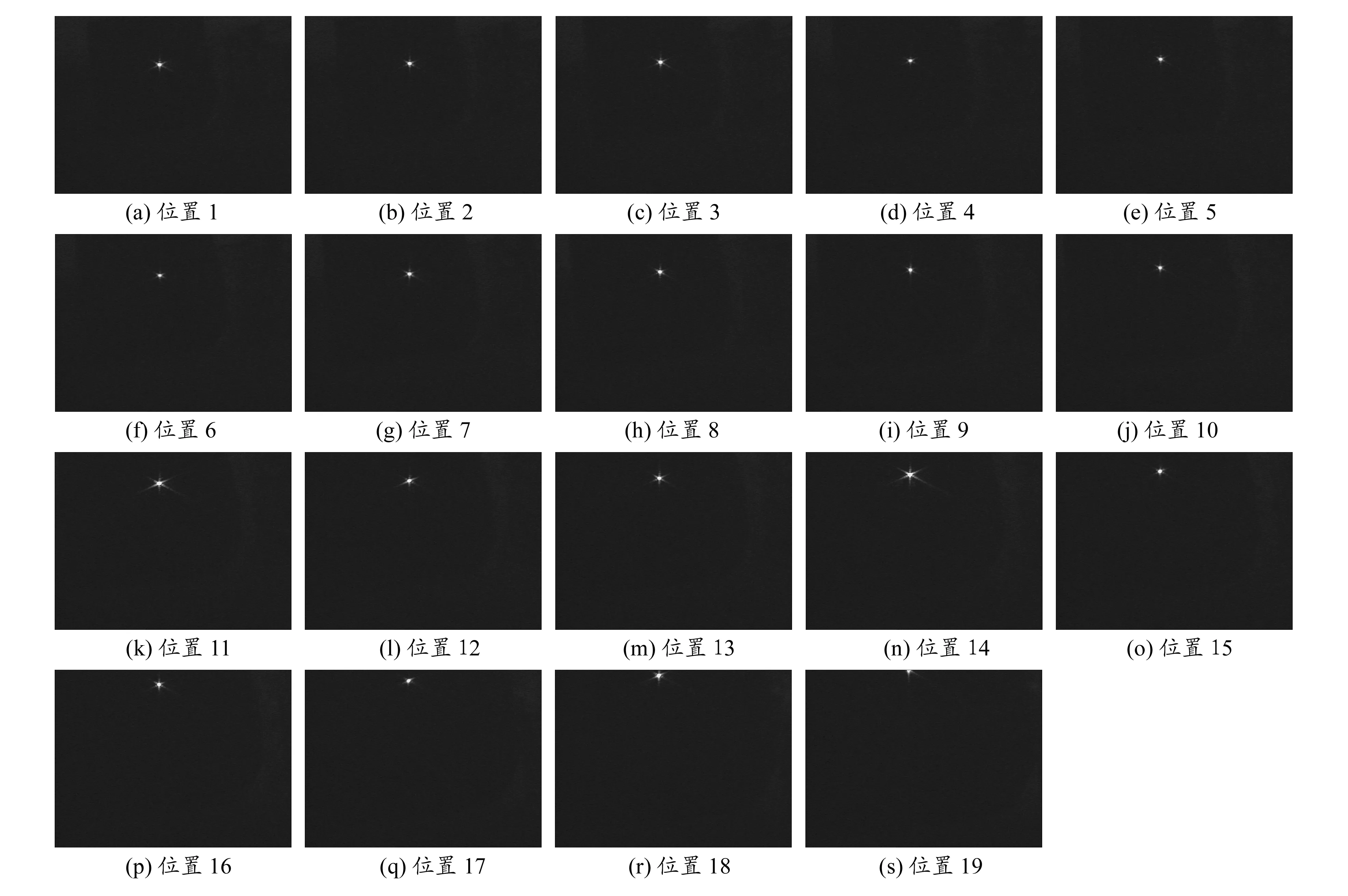
图2 试验采集的光斑图像
表1实验数据
位置摄像机位置/mm标靶位置/mm两者间距离/mm图像中心横坐标/Pixel图像中心纵坐标/Pixel1619.5668-26.7117646.2785340.9110158.21232-6.8792626.4460340.6103154.2426313.3460606.2208340.8400150.0933433.4637586.1031340.1415145.2170553.3322566.2346340.1167140.6000673.2917546.2751340.7300134.6500793.3045526.2623340.2500129.78688113.2879506.2789340.2517123.32659133.3233486.2435340.1172116.953110153.4200466.1468339.0168109.958011173.3612446.2056339.1941102.494512193.2824426.2844339.465493.377413213.3217406.2451337.773385.213314233.3013386.2655339.109073.436115253.3210366.2458338.405463.114916599.5019346.1809339.141149.122717579.5461326.2251337.395736.237418559.5963306.2753337.218019.910019539.6286286.3076336.00005.6832
(2)
采用相关软件求得这两段拟合方程系数,见表2。

表2 系数a,b,c的值
(3)
3.3验证精度
为了验证该模型的拟合精度,保持摄像机的位置不动,移动标靶台的位置,采集了12幅与之前不同的图像,剔除横坐标变化较大的6幅图,得到如图3所示的图像。按照相同的步骤得到每幅图像的中心纵坐标,代入相应的分段二次多项式(式(2)),并保证这些点的中心像素坐标值落入规定的范围内(不符合范围内的删除),然后与实际测得的距离进行误差分析。分析结果见表3。

图3 试验采集的光斑图像
表3计算距离与实际距离的误差分析
x的取值范围在[93.377 4,158.212 3],选取表3中前6组数据代入拟合曲线中算出计算距离,并与实际距离比较可知:试验中测距相对误差最大为0.346 4%,说明拟合的效果还是比较理想的,可以满足自主导航机器人避障测距的准确性要求。
4 结束语
本文的测距思路为先测距再建模,最后根据建立的模型计算出目标物的深度信息。此方法无需考虑成像模型、成像系统误差、镜头畸变等带来的影响。实验表明,该算法思路是有效的,能满足测距的准确性要求。下一步的工作重点和难点就是研究如何将本算法模型“移植”到机器人上,让机器人根据此模型能够“计算”出与障碍物之间的距离,为及时避障做好准备。
[1] 黄桂平,李广云,王保丰,等. 单目视觉测量技术研究[J]. 计量学报, 2004, 25(4):314-317.
[2] 邾继贵,李艳军,叶声华,等. 单摄像机虚拟立体视觉测量技术研究[J]. 光学学报, 2005,25(7): 943-948.
[3] 周平,王从军,陈鑫. 计算机单目视觉测量系统[J]. 光电工程, 2005,32(12): 90-93.
[4] Eric Krotkov. Mobile robot localization using a single image[C]//Robotics and Automation,1989 IEEE International Conference. Sydney:IEEE 1989 Conference Proceedings,1989:978-983.
[5] Nguyen Xuna Dao, Bum-Jae You,Sang-Pok Oh. Visual navigation using a single camera[C]//Computer Vision,1995 Fifth International Conference. Tokyo: Computer Vision 1995 Conference Proceedings.1995:645-652.
[6] PENG G,HUANG X H,GAO J,et al. Vision based Intelligent Control and Automation[C]//WCICA 2006. Dalian: The Sixth World Congress, 2006:9124-9128.
[7] Naoki YAMAGUTI,Shunichro OE,Kenji TERADA. Method of distance measurement by using monocular camera[C]//Proceedings of the 36th SICE Annual Conference . New York:SICE Conference Proceedings. International Session Papers ,1997:1255-1260.
[8] Naoki YAMAGUTI,Shunichro OE,Kenji TERADA. A Distance Measurement available to Texture Surface by using Complex-Log Mapping[C] Industrial Electronics, Control and Instrumentation,1997 IECON 97.23rd International Conference. Tokyo:IECON 1997 Conference Proceedings, 2006:1142-1147.
[9] 石春琴,张丽艳,韦虎,等. 随机模式投影双目测量系统中的单目测量[J].光学精密工程,2010,18(1):257-274.
[10] SAXENA A,CHUNG SH,NG A. Learning depth from single monocular images[J]. Advances in Neural Information Proceedings,1989(2):978-983.
StudyontheMonocularVisionandtheRangingMeasurementoftheLaserSpot
DENG Xingyu, ZHU Xinglong, WANG Chao
(Yangzhou University, Jiangsu Yangzhou, 225127, China)
It establishes a kind of ranging model method based on monocular vision and laser. Firstly, it uses the laser spot on the object by three coordinate measuring machine to generate the measuring location information and obtain the location information of the laser spot on the single CCD image by image processing, and builds an one-to-one relationship between them. Then moving the object, which leads to the changes of the laser spot on the CCD image, obtains more groups of corresponding data. According to these data, it illustrates the experimental model, measures a certain range of distance and compares with the results from three coordinate measuring machine. The results verify the feasibility of this method.
Monocular Vision Measurement; Segmented Curve Fitting; Ranging Model; Robot
10.3969/j.issn.2095-509X.2014.03.006
2013-12-02
国家自然科学基金资助项目(60977071)
邓星宇(1988—),男,江苏扬州人,扬州大学硕士研究生,主要研究方向为机械电子与机器人。
TP242.6
A
2095-509X(2014)03-0023-04
猜你喜欢
科学(2020年3期)2020-01-06
中国惯性技术学报(2019年1期)2019-05-21
电子制作(2018年12期)2018-08-01
测绘工程(2018年3期)2018-03-20
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年7期)2017-06-05
光学精密工程(2016年4期)2016-11-07
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
测绘学报(2015年4期)2015-01-14
太空探索(2014年1期)2014-07-10