金属橡胶减振器在机载光电吊舱复合减振系统中的应用
2014-09-05 07:33:44张国玉高玉军丁金伟郎小龙
振动与冲击 2014年5期
王 平, 张国玉, 高玉军, 丁金伟, 郎小龙
(1. 长春理工大学 光电工程学院, 长春 130022;2. 中国科学院 长春光学精密机械与物理研究所, 长春 130033)
随着现代军事技术飞速发展,航空侦察在战争中的地位显得越来越重要。机载光电吊舱是用于航空侦察的主要设备,其核心任务是获得高质量的侦察图像。对机载设备而言,其振动环境比较恶劣,飞机在起飞、正常飞行、下降时都会对机载光电吊舱产生振动和冲击。各种飞行器在飞行过程中受到发动机和高速气流的激励,所产生的振动和谐振对光电吊舱成像质量的影响十分严重。为提高机载光电吊舱的成像质量和稳定精度,必须对载体的振动加以抑制[1-3]。
载体的振动以线振动和角振动两种形式作用于光电吊舱内部载荷,有关文献指出,当光学系统的焦距为0.3 m,物距为3 000 m时,振幅为30″的角振动产生的像移是振幅为1 mm线振动产生像移的436倍[4],角振动对光电吊舱成像质量的影响要远大于线振动,因此,消除振动对光电吊舱成像质量的影响主要是控制光电吊舱角位移的大小。很多学者对此进行了深入研究,张葆,贾平等设计了一种直线导轨式无角位移减振结构,将振动引起的角位移进行运动分解,然后配合一种三向等刚度减振器以消耗各方向的运动能量[5]。安源、许晖等应用空间连杆机构学原理和减振理论,设计了由空间连杆机构组成的无角位移减振装置,使用该减振装置对光电平台进行隔振可使角振动的隔振效果提高两个数量级[6]。李伟、舒陶等根据机载光电设备无角位移减振的性能要求设计了将角振动转化为线振动的平行四边形减振机构,并建立了控制角位移误差的数学模型[7]。钱义、梁伟等利用空间机构学及平行四边形平动原理,研制了一种新的双平行四边形无角位移减振稳像平台,该隔振系统对频率高于100 Hz的振动衰减高达34 dB[8]。上述研究成果虽然都取得了良好的减振效果,但由于其限制角位移的机构是分体式组合结构,体积庞大,重量较重,无法满足航空机载条件要求。
文中基于光电吊舱两轴四框架成熟稳定结构,应用隔振理论构建光电吊舱内、外框架复合减振模型,采用金属橡胶作为隔振元件设计了能够限制一定自由度的小型减振器,将这种减振器分别嵌入光电吊舱内、外框架减振系统中设计了两级减振系统,这种复合减振系统在大大减小隔振系统体积和重量的同时从原理上实现了无角位移隔振,并可以对三个方向的线振动进行抑制,能够大大提高光电吊舱抗振动、冲击能力。
1 机载光电吊舱复合减振系统结构
两轴四框架结构是光电吊舱最为常用的一种框架形式,它具有稳定性好、抗干扰能力强、响应快等优点。吊舱两级减振系统示意图如图1所示,光学载荷固定在内框架上,内框架通过一级隔振系统连接到外框架,外框架再通过二级隔振系统与载机连接。
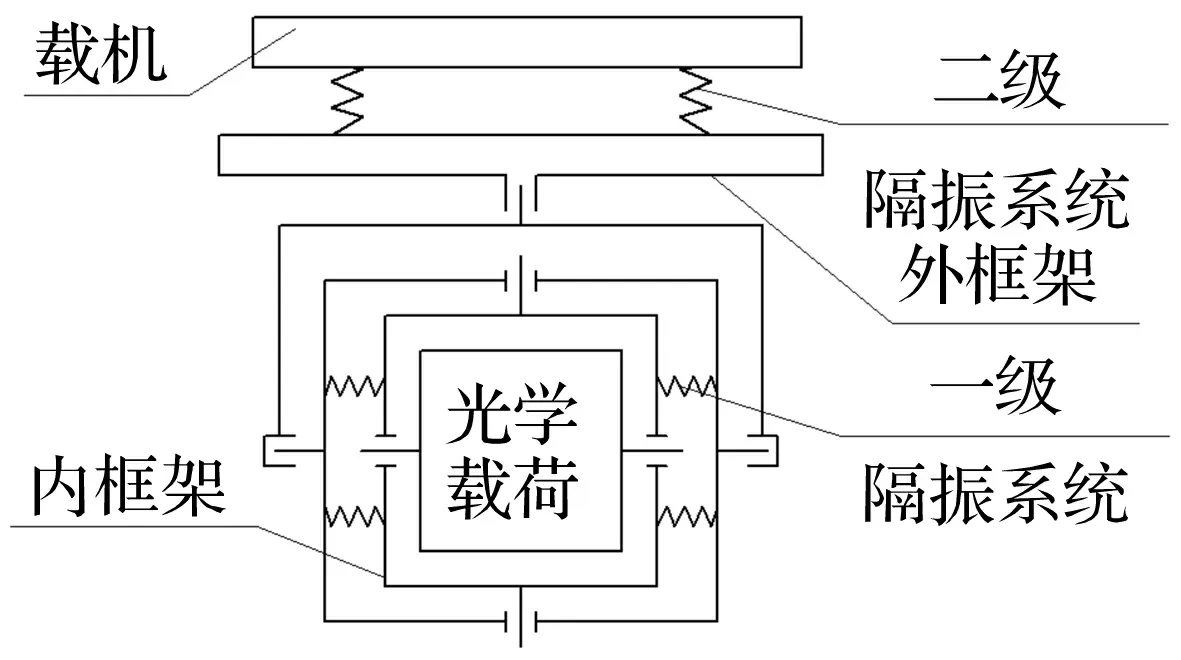
图1 吊舱两级减振示意图
外框架减振系统采用金属橡胶减振器进行单方向振动隔离,减振器结构原理如图2所示,其作用主要是隔离外框架沿y方向的振动。中心套沿y方向可以自由运动,沿x、z方向的自由度被限制。减振器可以有效隔离沿y方向的振动,但沿x、z方向的振动会通过中心套传递给外框架。使用时,减振器中心套与吊舱的外框架连接,外壳与载机连接。只要四只隔振器在x,z平面布置上间距合理,不是特别小,由于x,z平动自由度被限制,所以不会使外框架产生绕x、y,z轴的转动—即产生角位移。

图2 外框架金属橡胶减振器结构原理图
内框架减振系统采用金属橡胶减振器进行两个方向振动隔离,减振器结构如图3所示,其主要作用是隔离内框架沿x、z方向的振动。中心套沿x和z方向可以自由运动,沿y方向的自由度被限制,中心套与金属橡胶包容件的间歇沿着y方向很小,但沿z方向有一个运动变形间隙Δ,相当于有两个分别沿x、z轴的直线副。减振器可以有效的隔离沿x、z方向的振动。使用时中心套与吊舱的内框架连接,外壳与吊舱外框架连接,只要八只减振器以y,z平面左、右对称布置且间距合理,不是特别小,由于y方向平动自由度被限制,所以不会使内框架产生绕x、y,z轴的转动—即产生角位移。
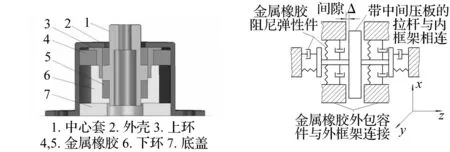
图3 内框架金属橡胶减振器结构原理图
外框架有沿x,y,z轴3个平动自由度和3个转动自由度,外框架减振系统只提供1个沿y轴的平动自由度。内框架有沿x,y,z轴3个平动自由度和3个转动自由度,内框架减振系统只提供沿x,z轴的2个平动自由度。最后内、外框架减振系统运动叠加,可以看出,与内框架连接的光学载荷只有3个沿x,y,z轴的平动自由度,即实现了光电吊舱三个方向无角位移隔振。
2 金属橡胶减振器研制
2.1 金属橡胶材料的制备
金属橡胶是一种新型精细结构材料,它是将不同直径和材质的金属丝卷制成螺旋卷,通过特殊的工艺,将螺旋卷定螺距拉伸后按一定形状进行编织铺放制成毛坯,然后将毛坯放入所需形状的模具中冷压成型,并经热处理而成的弹性多孔材料。它的制备工艺如图4所示[12-14]:

图4 金属橡胶元件制备工艺过程
(1)选择金属丝的材质和直径
金属丝的材质由金属橡胶元件的工作条件,如温度、湿度、侵蚀性介质、载荷等因素决定。工作在高温和侵蚀性介质中,一般采用0Cr18Ni9Ti和1Cr18Ni9Ti等。金属丝的直径取决于金属橡胶元件的尺寸及要求其具有的机械性能等。
(2)制备螺旋卷
螺旋卷的直径会对金属橡胶元件的弹性及阻尼性能产生影响。为了使螺旋卷较好地咬合钩连,一般将其直径控制在金属丝径的5~15倍。螺旋卷缠绕完成后,通过手工拉伸或使螺旋卷通过校准孔的方法进行等螺距均匀拉伸,使螺距与螺旋卷直径大致相等,其主要目的是使各丝线间相互啮合的状况达到最好,毛坯体积稳定性达到最高。
(3)制作毛坯
毛坯的成型主要通过按质量配料和铺砌来实现。毛坯的质量M毛坯根据成型后的金属橡胶元件的孔隙度Π体积VMR及金属丝的密度ρ丝来确定:
M毛坯=(1-Π)VMR·ρ丝
Π=1-V丝/VMR
孔隙度应视金属橡胶元件的应用场合而定。对于金属橡胶制品,配料时应使螺旋卷的根数尽量少,以保证整个制件的拉压强度和阻尼性能。制成的金属橡胶毛坯如图5所示。

图5 金属橡胶元件毛坯和拉伸螺旋卷
(4)冲压成型
将制成的毛坯放入预先设计加工好的专用冲模中,在液压机上经冷冲压成型。冲压时采用的压力大小要根据毛坯的质量及成型后金属橡胶元件的尺寸来确定。需要注意的是,将冷冲压成型的金属橡胶元件从模具中取出后,在弹性恢复力的作用下会有一定程度的膨胀,因此其尺寸要比在模具中的测量尺寸稍微大一些。
(5)后期处理
由于冲压过程中会产生金属屑和污物等,这些杂质的存在会影响金属橡胶元件的最终性能,因此一般都要进行清洗。对于弹性阻尼件一类的元件,则要采用超声波清洗。对有耐腐蚀工作要求的元件,还要涂敷保护膜。
2.2 内框架金属橡胶减振器研制
光电吊舱受到控制系统带宽的限制只能对25 Hz以下的振动进行主动抑制,故设计的减振器要保证能对25 Hz以上的振动进行被动减振。
2.2.1 结构设计
根据前述内框架减振器隔振原理,要求减振器能够衰减两个方向线振动,设计加工出内框架减振器如图6所示。
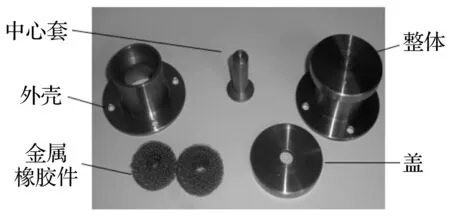
图6 加工出的内框架金属橡胶减振器
内框架减振器由中心套、盖、外套和金属橡胶件组成,外套底座安装在外框架上,中心套和盖通过螺栓固定在内框架上,减振器工作时,金属橡胶件受到压缩,内部金属丝相互摩擦,形成阻尼,起到减振作用。
2.2.2 参数计算
根据振动理论,选择的阻尼比ξ使振动传递率T控制在3~4之间为宜,经计算,阻尼比可设计为ξ=0.2。
光电吊舱的整体质量为80 kg,其中外框架质量为M=61 kg,内框架质量为m=26 kg。内框架隔振系统共有8个隔振器,则每个隔振器承受的力为:
F=26×9.8/8=31.85N
取g=9.8 m/s2,振源频率取f=25 Hz,为确保隔振器系统具有减振效果,即T<1,固有频率范围为:
则:
k1≤(2πf0)2(m/8)=37 042.52 N/m
由图3可以看出,当隔振器的中心套轴向运动时,只有一个金属橡胶件受压工作,所以金属橡胶件的轴向刚度即为k1。当中心套向侧面运动时,两个金属橡胶件径向同时受压,由于两个金属橡胶件属并联结构,所以理论上每个金属橡胶件径向的刚度应为:
2.3 外框架金属橡胶隔振器研制
2.3.1 结构设计
外框架起着支承和保护内框架的作用,根据前述外框架减振器隔振原理设计加工出外框架减振器如图7所示。外框架减振器由中心套、外壳、金属橡胶件和底盖组成。中心套通过圆柱副分别与外壳和底盖接触,对两处圆柱副进行精磨加工,使圆柱副的结合面的间隙尽可能小,以保证中心套只能沿轴向进行运动,避免因存在间隙使中心套发生摆动而导致线运动耦合成角运动。由图2可以看出,下侧金属橡胶元件是主要承力件,因此其厚度比上侧的金属橡胶元件稍大些。
图7 加工出的外框架金属橡胶减振器
2.3.2 参数计算

3 光电吊舱减振系统仿真分析
计算出内、外框架金属橡胶减振器具体参数后可以应用ADAMS软件Vibration模块对光电吊舱减振系统进行动态仿真以求得减振系统固有频率及角振动量值等参数。减振系统仿真分析的流程图如图8所示[15-16]。
3.1 有限元模型的建立及简化
在UG NX7.5中建立光电吊舱复合减振有限元模型如图9所示,可见光和红外两个光学载荷固定在内框架上,内框架通过左、右两个连接板上的各4个金属橡减振器固定到外框架上。外框架经二级隔振系统与载机连接。
图9 光电吊舱减振系统有限元模型
为了便于建立减振系统的动力学模型,在保证一定的计算精度下做如下假定[17-18]:
(1)减振器只考虑三个方向的刚度,不考虑扭转特性,减振器的阻尼以等效粘性阻尼来代替;
(2)吊舱做为刚体等效只计平台的质量,不计其弹性;
(3)外框架与减振器及载机与减振器连接处的刚度为无限大。
3.2 减振系统基本参数
对减振系统进行仿真计算时,需要的具体参数包括:减振系统的质量、刚度、阻尼比、质心位置、转动惯量、安装位置与安装角度等。外框减振系统采用四点平置均布式的连接方式,内框减振系统采取八只减振器相对光电吊舱中心三个方向对称布置方式,这样可以最大限度的实现解耦。通过对吊舱质量的配平,减振系统的质心与减振器支撑中心达到比较接近的位置。减振系统的橡胶减振器在仿真计算中采用Bushing(轴套)模型进行代替。外框减振器采用压剪式复合减振器,其轴向刚度与径向刚度可认为近似相等。橡胶减振器的阻尼特性比较复杂,这里以等效粘性阻尼进行替代计算,取粘性阻尼率ξ=0.2。
减振系统的基本参数如表1所示。
3.3 约束与边界条件的处理
首先在模型中建立输入激励源与输出通道。采用振幅值为常值、频率逐步增加的正弦加速度激励作为激励源。由于减振系统的振动主要由外界振动引起,因此在模型中建立一个吊舱的支撑架,替代吊舱安装的环境;并在支架的质心位置建立正弦激励的输入通道,使吊舱的减振系统产生受迫振动。选择吊舱的质心与减振器连接点作为输出通道,用于测量吊舱在扫频激励下减振系统的动态响应。

表1 减振系统的基本参数
通过对吊舱振动环境的分析,减振系统在沿载机坐标系的z与y方向承受的振动激励比较大,沿x方向的激励较小。因此,这里主要对减振系统沿z与y方向的振动特性进行分析。通过正弦扫频的仿真实验,计算沿z与y方向的加速度频率响应以及减振系统绕俯仰与横滚轴角振动信号的频率特性。
3.4 仿真结果
图10(a)为z方向1g的正弦激励时,减振系统沿z方向的加速度响应。从图中可以看出减振系统在z方向只有一个共振峰,对应的共振中心频率为16.9 Hz。由振动理论知减振系统沿z方向的共振频率范围在13 Hz~21 Hz之间。当阻尼率ξ增大时共振频率范围内的加速度的传递率减小。这与振动理论是相吻合的。
图10 正弦激励时系统加速度传递曲线
图11 y与z方向正弦激励时俯仰与横滚轴角振动的幅频特性曲线
图10(b)为y方向1g的正弦激励时,减振系统沿y方向的加速度响应。从图中可以看出,减振系统在y方向的共振峰有两处,对应的共振中心频率分别为16.7 Hz与24 Hz,分析产生这种现象的原因是内框减振系统虽然在y方向运动被限制,但不可避免会存在间隙,因此沿y向振动时,内、外框隔振器同时工作,此时振动系统为两自由度运动系统。减振系统在y方向的振动耦合,使得减振系统共振频率的范围增大,经过计算减振系统沿y方向的共振频率范围在13.3 Hz~33.6 Hz。
图11为z方向与y方向1g正弦激励时,相机绕横滚轴与俯仰轴角振动信号的幅频特性曲线。从图中可以看出,在z方向与y方向产生同样振动激励的条件下,y方向的振动激励产生的横滚角振动远大于z方向振动激励所产生的绕俯仰轴的角振动,产生这种现象的原因是减振系统在y方向存在振动耦合。y方向产生振动激励时,绕横滚轴角振动的幅值最大值达到0.001 1。当频率大于25 Hz时,角振动幅值趋近于零,说明吊舱减振系统对25 Hz以上角振动的抑制是很有效的。
4 试验验证
为验证仿真结果的正确性,对光电吊舱进行正弦扫频试验。试验频率为5~2 000 Hz,量值1 g。正弦扫描实验主要用于测量减振系统的共振中心频率、加速度的频率响应曲线。

图12 减振系统测量点的安装分布
4.1 测量点分布
为了全面、准确对吊舱减振系统的性能进行测量。振动试验在减振系统的上下位置(吊舱的机身与振动夹具的连接位置)设置测量点。吊舱的测量点放置在机身上,分别测量减振系统在y、z两个方向上的加速度响应信号。在振动夹具上的设置测量点,用于测量吊舱减振系统的输入激励。测量点如图12所示。
4.2 测量结果
图13为减振系统z、y方向的加速度频率响应曲线。正弦扫描实验的仿真结果与试验结果的对比见表2、表3。

图13 1g正弦扫频加速度的频率响应曲线

表2 正弦扫描试验结果
由表2可知减振系统在z与y方向的隔振效果都较好。在y方向的正弦振动实验中,减振系统在z方向振动的响应偏大,产生这种现象的原因是减振系统沿y方向存在振动的耦合。
通过表3的对比可知,减振系统共振中心频率的仿真计算结果与实际测量的结果比较接近,仿真计算的误差约为10%。通过分析计算误差来源主要是减振器轴向刚度与颈向刚度存在一定的差别。通过减振系统的正弦扫描实验,可估算出减振系统的共振频率范围在13.7 Hz~38 Hz之间。

表3 正弦扫描试验结果与仿真计算结果的对比
从图13z方向加速度传递率曲线中可以看出,加速度传递率曲线在高频部分不平滑,产生这种情况的原因是在高频振动时减振器不再符合无质量的假设,而是具有分布质量的特性从而产生了波动效应,使得高频区域的传递率变大。另外,加速度传递率曲线中在100 Hz附近出现了局部的增大,产生这种现象的原因是在仿真过程中只考虑了减振器这个弹性环节,忽略了其它的弹性环节。从图13y方向加速度传递曲线中可知,减振系统在横滚方向存在振动耦合,这与仿真分析结论是相同的。
5 结 论
(1)采用金属橡胶作为隔振元件,研制出两种能限制一定自由度的金属橡胶减振器,分别嵌入光电吊舱内、外框架减振系统中进行合理布置,从原理上实现了光电吊舱3个方向无角位移减振。
(2)由振动理论计算出两种金属橡胶减振器的相关性能参数,并采用特殊工艺制备了金属橡胶减振器。
(3)通过ADAMS/Vibration模块对光电吊舱减系统进行了仿真分析,计算出减振系统固有频率为17 Hz,角振动最大幅值为0.011。仿真结果表明光电吊舱两级减振系统对25 Hz以上的角振动有很好的减振效果。最后进行了振动测试,与测试结果相比,仿真结果误差不超过10%,从而验证了仿真结果的正确性。这种两级减振系统对其它四框架光电吊舱也是完全适用的。
参 考 文 献
[1]王 平,张国玉,刘家燕,等.机载光电吊舱无角位移隔振设计[J].红外与激光工程,2012,41(10):2799-2804.
WANG Ping,ZHANG Guo-yu,LIU Jia-yan et al. Irrotational displacement Vibration isolation on airborne Optoelectronic Pod[J].Infrared and Laser Engineering,2012,41(10):2799-2804.
[2]He F Y,Cui J C,Feng S L et al. Narcissus analysis for cooled staring IR system[J].SPIE,2007,6772:67224
[3]Xin G M N,Chen Y,Cheng L,et al.Simulation of a LHP-based thermal Control System Under Orbital Environment[J].Applied Thermal Engineering,2009,29:2726-2730
[4]杨词银,张建萍,曹立华.基于大气透过率比例校正的目标辐射测量方法[J].光学精密工程,2012,20(7):1626-1635.
YANG Ci-yin,ZHANG Jian-ping,CAO Li-hua.Infrared Radiation Measurement Based on Proportional Corrected Atmospheric Transmittance[J].Optics and Precision Engineering,2012,20(7):1626-1635.
[5]张 葆,贾 平,黄 猛.动载体成像模糊的振动被动控制技术[J].光学技术,2003,29(3):281-283.
ZHANG Bao,JIA Ping,HUANG Meng.Passive Vibration Control of Image Blur Resulting From Mechanical Vibrations on Moving vehicles[J].Optical Technique,2003,29(3):281-283.
[6]安 源,许 晖,金 光,等.动载体光电平台角振动隔振设计[J].半导体光电,2006,27(5):614-617.
AN Yuan,XU Hui,JIN Guang.Design of Angular Vibration Isolation for Optoelectronic Platform on Moving Vehicle[J].Semiconductor optoelectronics,2006,27(5):614-617.
[7]李 伟,舒 陶,陈祖金.新型无角位移减振机构设计[J].航空兵器,2009,4:45-47.
LI Wei,SHU Tao,CHEN Zu-jin.Design of Irrotational Displacement Vibration Reduction M echanism[J].AER0 WEAPONRY,2009,4:45-47.
[8]钱 义,梁 伟,高晓东.航空稳像光电平台设计[J].光子学报,2009,38(8):2108-2111.
QIAN Yi,LIANG Wei,Gao Xiao-dong.Design of Optoelectronic Platform for Stable image on Airborne Reconnaissance[J].ACTA PHOTONICA SINICA,2009,38(8):2108-2111.
[9]XIN Zhen-kui,FANG Yong-chun.Control System Design for Unmanned Helicopter to Track a Ground[J].Chinese Journal of Mechanical Engineering,2011,24(3):420-427.
[10]林 松,张 鲲,孙 磊,等.橡胶隔振器动态特性的本构研究[J].振动与冲击,2011,30(3):177-179.
LIN Song,ZHANG Kun,SUN Lei,et al.. Study on dynamic characteristics of rubber isolator[J].Journal of vibration and shock,2011,30(3):177-179.
[11]王 平,张国玉,高玉军,等.可见与红外双波段航空侦察相机光机设计[J].机械工程学报,2012,48(14):11-16.
WANG Ping,ZHANG Guo-yu,GAO Yu-jun et al.. Optics and Machine Design of Visible Light and Infrared Dual Spectral Aerial Reconnaissance Camera[J].Journal of Mechanical Engineering,2012,48(14):11-16.
[12]何小静,上官文斌.橡胶隔振器静态力-位移关系计算方法的研究[J].振动与冲击,2012,31(3):91-97.
HE Xiao-jing,SHANG Guan-wen-bin.Calculating methods for force versus displacement relation of a rubber isolator[J].Journal of vibration and shock,2012,31(3):91-97.
[13]辛宏伟,关英俊,柴方茂.离轴空间遥感器主支撑结构设计[J].光学精密工程,2012,20(6):1257-1264.
XIN Hong-wei,Guan Ying-jun,Chai Fang-mao.Design of main support of off-axis space remote sensor[J].Optics and Precision Engineering,2012,20(6):1257-1264.
[14]SU Zhong-yuan,ZHANG Yao-ming,JIA Min-ping,et al. Design of Reflective Concentrator Model with Application for Concentrator Photovoltaic System[J].Chinese Journal of Mechanical Engineering,2011,24(6):1007-1012.
[15]安 源,贾学志,张 雷,等.基于碳纤维复合材料的空间相机高比刚度主承力板优化设计[J].光学精密工程,2013,21(2):416-422.
AN Yuan,JIA Xuezhi,ZHANG Lei, et al. Optimizing design of CFRP based main backbone with high stiffness ratio for space camera[J].Optics and Precision Engineering,2013,21(2):416-422.
[16]范 磊,张景旭,吴小霞,等.大口径轻量化主镜边缘侧向支撑的优化设计[J].光学精密工程,2012,20(10):2207-2213.
FAN Lei,ZHANG Jing-xu,WU Xiao-xia, et al. Optimum design of edge-lateral support for large-aperture lightweight primary mirror[J].Optics and Precision Engineering,2012,20(10):2207-2213.
[17]XIN Zhen-kui,FANG Yong-chun.Control System Design for Unmanned Helicopter to Track a Ground[J].Chinese Journal of Mechanical Engineering,2011,24(3):420-427.
[18]刘 宇,段耀宇,刘 利,等.悬臂梁陀螺仪机械性能优化及系统实现[J].光学精密工程,2012,20(9):2051-2059.
LIU Yu,DUAN Yao-yu,LIU Li,et al. Mechanical performance optimization and system implementation of cantilever beam gyroscope[J].Optics and Precision Engineering,2012,20(9):2051-2059.
猜你喜欢
中国新技术新产品(2023年1期)2023-04-07 02:25:26
科学大观园(2022年14期)2022-07-17 03:54:41
机电信息(2021年17期)2021-07-01 05:14:00
课程教育研究·学法教法研究(2018年14期)2018-08-11 09:09:46
航空模型(2016年10期)2017-05-09 06:30:58
光学仪器(2016年5期)2017-01-12 14:28:05
九江学院学报(自然科学版)(2015年2期)2015-11-12 03:35:09
中国舰船研究(2014年6期)2014-05-14 06:45:24
机床与液压(2014年3期)2014-03-17 01:16:44
汽车科技(2014年6期)2014-03-11 17:45:36