MATLAB的交互仿真在《机械设计基础》课堂教学中的应用
2014-08-06 01:10徐高欢陈雯兰孙培峰万海波
浙江水利水电学院学报 2014年1期
徐高欢,陈雯兰,孙培峰,万海波
(浙江水利水电学院 机械与汽车工程学院,浙江 杭州 310018)
《机械设计基础》是工科专业的专业基础课,包含了大量机械原理的基础内容,该课程内容非常丰富,涉及很多原理性的问题,通过理论推导学生不太感兴趣,很多学生有“特困生”的表现,上课容易犯困.为激发学生对该课程的学习兴趣,改变《机械设计基础》的课堂状况,我们寻求动画交互式仿真提高学生积极性.《机械设计基础》交互式仿真主要使用MATLAB工具,它是一种以矩阵运算为基础的交互式程序语言,是专门针对科学和工程计算设计的,其绘图表现形式直观.与其它计算机高级语言相比较,它的特点是使用方便,输入简单,运算高效,内容比较丰富.MATLAB软件的强大计算和绘图仿真功能,把它应用于《机械设计基础》课堂教学中,不但可以激发学生学习兴趣,培养学生独立思考问题的能力,还能真正让学生掌握一些现代化的设计工具.MATLAB软件巧妙地融入机械类课堂教学中,可以促进现代机械教育教学思想和教学模式的改革创新.
1 《机械设计基础》典型案例交互仿真平台设计
《机械设计基础》典型案例交互仿真平台使用MATLAB2011工具开发的教学仿真平台.该平台囊括了《机械设计基础》的平面连杆机构、凸轮机构和齿轮机构等11个典型机构仿真,每一个仿真案例都是可以互动的,学生可以修改机构参数,通过动画向学生展示机构运行状态,非常直观易懂.另外,该仿真平台是基于MATLAB2011的GUI开发的,源代码容易理解,有编程基础的学生可以自行修改,学生在学习《机械设计基础》的同时,可以学习matlab的机构仿真技术.该仿真平台主要开展两方面的仿真:机构运动学仿真和机构动力学仿真.
1.1 机构运动学仿真
机构运动学仿真主要利用MATLAB软件求解机构在所在时间域内的运动学方程,以确定该机构在连续运动过程中各个构件的速度和加速度[1-3],在MATLAB环境可以利用交互控件可以实时设置各个参数的值,再利用画图函数和控件可以直观地实时展示各构件的运动状态,并能够显示速度和加速度曲线,方便学生认识和掌握《机械设计基础》中有关机构运动的内容,如铰链四杆机构的运动规律,凸轮机构的运动规律,齿轮机构的运动规律等.
1.2 机构的动力学仿真
机构的运动由于载荷和速度的变化,为提高机构的动力学性能,其动力学的仿真显得尤为重要[1-3].而动力学仿真涉及到大量运算,《机械设计基础》有部分内容是牛顿力学用于多刚体的动力学求解,MATLAB动力学仿真主要应用牛顿力学对每个单独的构件进行力学分析,在通过动力学的序列求解方法[3-7],根据机构构件加速度的约束条件建立力和加速度之间的关系,建立代数方程组,在通过程序求解每一时刻的力和加速度,同样利用画图函数和控件实时展现各个构件的力和加速度曲线[3],学生通过仿真程序可以非常直观了解机构的受力情况,加深学生对机构动力学分析的理解.
2 《机械设计基础》交互仿真的部分案例
2.1 铰链四杆机构交互仿真
铰链四杆机构是将四个杆件用四个转动副组成的机构.主要有机架、2个连架杆和连杆组成,其中能够360°旋转的杆件称为曲柄,只能往复运动的杆件称为摇杆,根据杆件长度不同铰链四杆机构可以分为三类:曲柄摇杆机构、双曲柄机构和双摇杆机构[1].判断铰链四杆机构具体类型的方法,就是通过曲柄存在的条件和它的推论来实现,具体内容不再详述.为了让学生更直观理解这三类机构的运动情况,在 《机械设计基础》课堂中演示仿真程序,原理如下.
(1)位移方程
其中:L1和L3—连架杆长度;L2—连杆长度;
L4—机架的长度;
φ1—杆件1和杆件4的夹角;
φ2—杆件1和杆件2的夹角;
φ3—杆件3和杆件4的夹角.
(2)速度方程
其中:ω1—杆件1角速度;ω2—杆件2角速度;
ω3—杆件3角速度.
(3)加速度方程
其中:a2-杆件2角加速度,a3-杆件3角加速度.
该仿真程序根据杆长的变化可以实现曲柄摇杆机构、双曲柄机构和双摇杆机构三种类型的变化,学生可以通过以下界面输入杆件长度,可以直观看到铰链四杆机构的运动情况,并且实时显示运动学和动力学参数.具体仿真界面铰链四杆机构仿真1(见图1)和图2的铰链四杆机构仿真2.
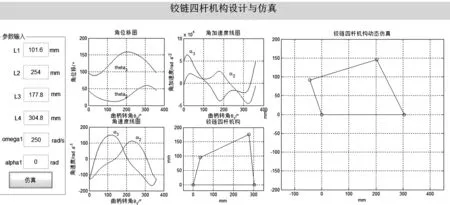
图1 铰链四杆机构仿真1

图2 铰链四杆机构仿真2
2.2 凸轮机构的交互仿真
要进行凸轮机构的交互仿真,首先要建立从动件运动规律和凸轮轮廓线的关系表达式,通常根据反转法建立方程[1].即假设整个机构以一定角速度绕凸轮旋转中心转动,凸轮固定不动,机架和从动件以假设的角速度旋转,从动件和凸轮的相对运动规律不发生改变.根据这一关系,可以求出从动件的位置规律.
从动件的运动方程
其中:r—基圆半径;
s—从动件运动规律;
φ—凸轮的转角.
该仿真程序根据基圆半径、推程运动角、回程运动角、行程、远休角和近休角参数的调整可以调整凸轮形状,获得相应的从动件运动规律,学生可以通过交互界面输入这些参数,可以直观看到凸轮机构外形的动态变化以及运动情况(见图3,图4).
2.3 标准齿轮的交互仿真设计
标准齿轮的两个重要参数是模数和齿数,标准齿轮的交互仿真设计需要建立模数和齿数与齿廓之间的关系[1、3].标准齿轮的工作部分齿廓是渐开线,齿顶和齿根部分的圆弧是标准的圆弧,渐开线和齿根圆弧的连线是一段直的线段.根据这一形状特点,可以建立模数、齿数和齿廓之间的数学关系.

图3 凸轮机构仿真
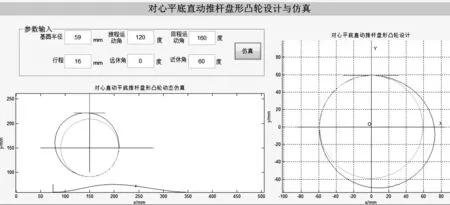
图4 凸轮机构仿真
(1)齿廓渐开线部分的方程
其中:ri—渐开线处的向径;
βi—渐开线处向径与y坐标轴的夹角.
(2)渐开线和齿根处径向直线方程
(3)齿根圆上的一段圆弧方程
其中rhu1是齿根圆向径.
(4)齿顶圆上的一段圆弧方程
其中:rhu2-齿顶圆向径.
该仿真程序根据齿轮模数和齿数两个参数可以调整齿廓的形状,学生可以通过交互界面输入这些参数,可以直观看到齿轮外形的动态变化情况,(见图5,图6).

图5 齿轮机构仿真
3 结 论
《机械设计基础》典型案例交互仿真平台已在浙江水利水电学院机械电子工程系的课堂教学中已经使用,班级有汽车11-12班、汽电11-12班,学生数有140人.另外,杭州职业技术学院的青年汽车学院部分班级也在使用该平台,汽营12-1班、汽营12-2班,学生数有90人,两个学校合计使用人数达到230人.该平台可以比较直观地展示《机械设计基础》典型机构的原理和机构运动效果,为方便学生使用,有关源代码和应用程序挂在网络课程资源下载供学生下载使用.取得了良好的教学效果.
参考文献:
[1] 郑文纬,吴克坚.机械原理[M].北京:高等教育出版社,1996.
[2] 赵 匀.机构数值分析与综合[M].北京:机械工业出版社,2005.
[3] 约翰.F.加德纳.机构动态仿真-使用MATLAB和SIMULINK[M].周进雄,张 陵,译.西安:西安交通大学出版社,2002.
[4] CHEN JIAN-NENG, ZHAO XIONG, JIANG MIAO, et al. Kinematic Analysis of Elliptic-gear & Eccentric Slider-crank and Uniform-pitch Screw Weft-insertion Mechanism Journal of Donghua University.2010,27(6)852-857.
[5] CHEN JIAN-NENG, ZHAO XIONG, HU YU-LONG,et al. Reverse Design and Test of Non-circular Gear and Crank-Rocker & Gear Trains Weft Insertion Mechanism.Journal of Donghua University.2011,28(3):243-247.
[6] CHEN JIANNENG, WANG YING, ZHAO XIONG,et al. Establishment and application of the platform for reverse solution and parametric design platform of the conjugate cam beating-up mechanism.Advanced Textile Research,2011 International Conference on Textile Engineering and Materials,ICTEM,2011:303-308.
[7] 赵会匀,高林弟,陈建能,等.变形偏心非圆齿轮行星系分插机构设计和参数优化[J].农业机械学报,2011(12):74-77.
猜你喜欢
科学技术创新(2022年24期)2022-08-06
制造技术与机床(2019年8期)2019-09-03
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
制造技术与机床(2017年5期)2018-01-19
山东工业技术(2016年23期)2016-12-23
职业(2016年10期)2016-10-20
考试周刊(2016年79期)2016-10-13
大学教育(2016年9期)2016-10-09