基于虚拟参考站技术的组合差分信息生成研究与实现
2014-07-25 05:17:50史小雨鲍志雄潘国富
导航定位学报 2014年2期
史小雨,鲍志雄,潘国富
(广州中海达卫星导航技术股份有限公司,广州 511400)
1 前言
无线通讯、因特网应用的蓬勃发展,带动了传统差分定位测量模式的新一轮变革,为满足高精度动态导航定位服务领域要求,实现区域范围内厘米级、分布均匀、高可靠性的实时动态定位应用,以区域永久连续运行参考站网络为基础的网络RTK(real time kinematic,RTK)定位技术应运而生。虚拟参考站(virtual reference station,VRS)技术由于具有通用性强、操作简单、性能可靠等优点日益成为网络RTK领域最成功、应用最广泛的解决方案[1]。
我国北斗卫星导航系统(BeiDou navigation satellite system,BDS)经过了北斗系统一代的过渡后有了快速的发展。2011年底,拥有11颗星的北斗系统具备了初始运行能力;2012年12月底,中国卫星导航系统管理办公室公布其正式接口控制(interface control document,ICD)文件,标示北斗系统开始提供覆盖中国及周边地区的正式运行服务。预计到2020年,北斗系统全面建设完毕。届时,由30余颗卫星组成的北斗系统将提供覆盖全球的高精度、高可靠的定位、导航和授时服务。随着北斗系统的不断完善,建立北斗系统连续运行 参 考 站 (continuously operating reference stations,CORS)的需求也将日益扩大,基于这个背景,本文着重研究了全球定位系统(global positioning system,GPS)、格拉纳斯卫星导航系统(global navigation satellite system,GLONASS)及BDS等系统组合虚拟参考站技术中的基线解算、长距离参考站间整周模糊度计算及差分信息生成,并通过编程实现验证了该方法的可用性和可靠性。
2 GPS/GLONASS/BDS组合数据处理
2.1 时间系统与变换
为了精密导航与定位的需要,三个系统各自建立了自己的时间系统。其中GPS时间系统称为GPS时(GPST)。由GPS主控站的原子钟控制,属地方原子时。其秒长与国际单位制 [SI]的定义相同,但与国际原子时(international atomic time,IAT)的原点不同,二者关系为

GPS时(GPS time,GPST)与协调世界时(coordinated universal time,UTC)在 1980-01-01 T00:00:00相一致。由于GPST没有闰秒,所以随着时间的积累,两者之间的差别将表现为秒的整数倍,二者关系为

GLONASS采用的时间系统是GLONASS时(GLONASS Time,GLONASST),与协调时具有相同的闰秒,但有一个3h的偏移常数。即

北斗系统的时间基准为北斗时(BeiDou navigation satellite system time,BDT)。BDT与GPST一样,均采用SI秒为基本单位连续累计,不闰秒,起始历元为2006-01-01UTC 00:00:00,采用周和周内秒计数。因此BDT与GPST固定相差14s。
由于接收机自主交换格式(receiver independent exchange format,RINEX)文件历元时间为GPST,所以解算时都将GLONASS与BDS都归算至GPST,具体转换关系为

实际数据处理时,RINEX导航文件采用的是UTC时间,因此,一般只考虑闰秒数即可。
2.2 坐标系统与变换
对于坐标系统而言,GPS采用的是WGS84坐标系,GLONASS采用PZ-90坐标系,而BDS采用的是CGCS2000坐标系。在进行组合数据处理时,为了解算方便,一般将GLONASS及BDS都转换至WGS84系统下,相关的转换算法及参数在其他文献里都有详细的说明[6],此处不在赘述。
2.3 参考星选择
由于三个系统之间的载波频率互不相同,所以在处理GPS/GLONASS/BDS组合观测值时候需要为三个系统选取不同的参考卫星。对于北斗系统而言,它采用了与GPS系统相同的码分多址技术,处理方法与GPS类似,可以选取高度角最大的卫星作为参考卫星。但对于GLONASS系统而言,由于频分多址技术的影响,在组建双差观测值时不能将双差模糊度与单差模糊度进行分离,法方程奇异,必须利用伪距求出参考卫星的站间单差模糊度才能消除这种奇异性。为了减少伪距误差对模糊度固定的影响,需选用与其他卫星频率差较小的卫星作为参考星[2,4]。
3 通用VRS观测值计算模型
3.1 相位VRS观测值数学模型(设i为参考星)
在主参考站A与VRS间求站际一次差,得

式(5)中,λ为载波波长;φ为载波相位观测值;ρ为星站距离;I为电离层延迟;T为对流层延迟;O为卫星轨道误差;M为多路径效应误差;ε为接收机噪声;δti为接收机钟差。令S=-I+T+O,则S表示综合距离相关误差。将VRS观测值移至方程左端,式(5)可变为

式(6)中,ref为参考星。对于任意卫星在任意历元,ΔSrefAV、ΔMrefAV、cΔδtAV为常量且可在差分计算中消除,可将其合并为常数项量;另外VRS位置接收机钟差、整周模糊度均为零值、因此方程式(6)可转化为
则根据观测方程式(7),非差VRS观测值完整的数学计算式为
此时,参考星i相应的观测值:

VRS相位观测由主参考站的非差观测值、几何配置值以及VRS与主参考站间基线上的误差改正数组成,是对于VRS位置相位观测值(小数周观测量)的数学模拟,与实际参考站相位观测值一样,VRS相位观测值仍然是一个相对观测量,对于移动用户而言应用VRS相位观测值进行计算与常规参考站相位观测值的处理一样,仍然需要计算整周模糊度[9]。
3.2 伪距VRS观测值数学模型(设i为参考星)
与非差相位观测值的推导类似,VRS伪距观测值的形式为

此时,参考星i相应的观测值

4 长距离参考站间整周模糊度的计算
由于CORS站彼此之间距离均较远,为实现快速可靠的模糊度解算检核以及精确误差建模,必须预先把CORS网络内独立的参考站组成网络,其核心问题是如何能实时正确地解算参考站间的整周模糊度,进而准确地估计距离相关误差源的影响(如:对流层延迟和电离层延迟等)。
参考站网络利用参考站的精确坐标作为已知信息来改善参考站间整周模糊度的固定,进而准确地估计站间实时的对流层延迟和电离层延迟等距离相关误差影响,对处在参考站网络中的流动站,就可以根据周围的参考站间的大气延迟信息较精确地计算出它和某参考站间的大气延迟,辅助整周模糊度解算。因此,参考站间整周模糊度的在线解算是网络RTK的基础。
目前对长基线模糊度解算方法国内外许多学者开展了许多研究工作,文献 [6]提出了参考站间的单历元整周模糊度搜索法,该方法的主要思想是不解方程组,直接利用测站坐标已知、模糊度为整数和双频整周模糊度之间的线性关系这三个条件进行搜索,但其原理并不完善、可靠,故该方法没得到广泛应用。相比文献 [1]的快速整周模糊度解算是一种有效的长基线模糊度固定方法,其解算思路是在常规的 “三步法”基础上使用并行滤波和扩波技术:先对宽巷模糊度和电离层无关模糊度并行进行卡尔曼滤波,由于宽巷的长波特性,滤波过程中必然先得到求解,再将其作为己知值代入电离层无关组合,使电离层无关组合波长由0.006m扩大到0.107m,最后通过对天顶对流层延迟湿分量的估计和对L1模糊度的整数估计来固定模糊度并计算参数固定解。本文依据上述方法,结合区域CORS系统参考站网络的特点,给出一种快速且易实现的模糊度固定方法,并成功应用在中海达CORS软件ZNetVRS中,即先利用宽巷组合的长波特性确定宽巷模糊度,然后通过估计对流层延迟干湿分量,利用电离层无关组合分离出L1模糊度并通过卡尔曼滤波进行参数估计[3]。具体处理流程见图1。
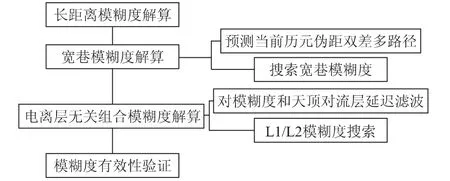
图1 模糊度解算和大气延迟计算模块结构图
5 系统实现与分析
5.1 软件实现
根据上述理论与方法,在西南交通大学与广州中海达公司联合开发的CORS服务器软件ZNetVRS基础上增加和修改了若干模块,主要包括BDS与GLONASS数据预处理、GPS/GLONASS/BDS组合模糊度固定、差分数据生成与播发等,从而开发出面向GPS/GLONASS/BDS多系统组合VRS解算软件。用户可以自主选择接入的卫星系统,同时软件支持多种数据播发格式,包括RTCM 2.3、RTCM3.1以及最新的RTCM3.2。
5.2 实例分析
为了检验ZNetVRS系统的理论正确性,测试系统精度指标与稳定性,在我国东部某市进行了实践建设。整个项目一共包含11个参考站,由基准站系统,网络通讯系统,中心服务器解算系统,移动站系统构成。基准站采用中海达VNet6三星双频接收机,天线选用抑制多路径的扼流圈天线。具体测站分布如图2所示。
5.3 系统测试结果与精度指标
经过近一年的实践检验,该系统能长期稳定工作,按照CORS系统建设的规范要求,对系统进行了多方面的详细测试,下面主要介绍RTK精度测试的结果。测试方案:在网内外均匀布设测试点,均匀分布在系统覆盖区域及周边。测试点尽可能利用该市已有的GPS控制点,直接获得参考坐标,非控制点的测试点通过静态测量和基线解算得到参考坐标,将各测试点的实时RTK定位结果与参考坐标比较,评定定位精度。一共选择了20个测试点,在各个测试点上连续采集30个以上历元的固定解结果进行精度分析
(1)内符合精度
内符合精度是单次观测值均方根误差,可以反应出定位结果的收敛情况,通过式(1)计算

图2 某市CORS站分布图

式(12)中,n为测试点上的观测子样数、n≥20,v是测试点上每个观测子样与其观测子样平均值的差值,统计得到所有测试点内符合精度如表1所示。
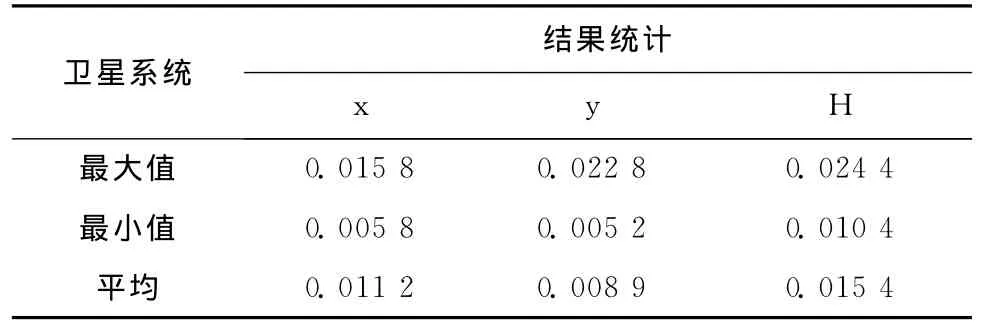
表1 系统内符合精度/m
(2)外符合精度
外符合精度需要测试点的坐标参考值,其直接反映出系统快速或实时定位的精度,通过式(13)进行计算

式(13)中,Δ是测试点上每个观测子样与其参考值的差值,统计得到所有测试点外符合精度如表2所示。
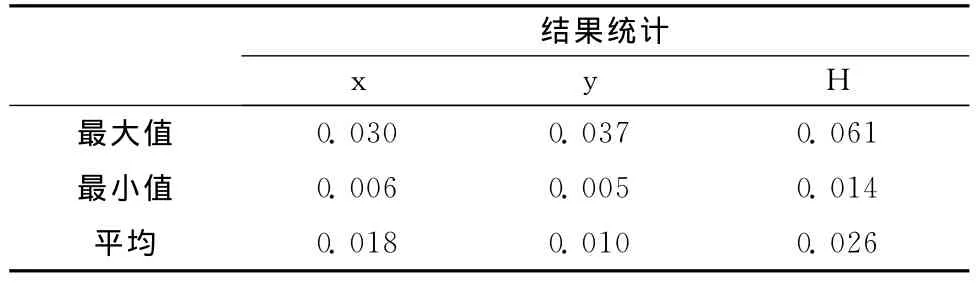
表2 系统外符合精度/m
可以看出,该CORS系统内符合精度为平面x方向1.1cm、y方向1.0cm、高程1.5cm;外符合精度达到平面x方向1.8cm、y方向1.0cm、高程2.6cm。一般CORS系统的精度设计指标为平面精度σ平面<5cm,垂直精度σ垂直<10cm,因此测试结果表明该CORS系统能够提供稳定可靠的实时动态定位服务,满足厘米级网络差分定位需要。
6 结束语
本文主要研究了基于VRS的网络RTK技术的核心算法,主要包括中长基线整周模糊度的在线固定和VRS网络差分信息的生成与发布。中长基线整周模糊度固定采用以下方法:先利用宽巷组合的长波长特性确定宽巷模糊度,然后通过估计对流层延迟干湿分量,利用电离层无关组合分离出L1的整周模糊度。实验证明该方法可靠有效,可以正确固定中长基线模糊度信息。
根据上述理论与方法开发CORS服务器软件ZNetVRS,并结合广州中海达实际CORS项目,对软件的精度进行测试。结果表明利用该软件,系统内符合精度为平面x方向1.1cm、y方向1.0 cm、高程1.5cm;外符合精度达到平面x方向1.8cm、y方向1.0cm、高程2.6cm。
[1]黄丁发,周乐韬,刘经南,等.基于Internet的VRS/RTK定位算法模型及实验研究[J].武汉大学学报:信息科学版,2007,32(3):220-224.
[2]史小雨,袁本银,鲍志雄.GPS/GLONASS/COMPASS组合定位模糊度方法研究与实现 [C]//第四届中国卫星导航学术年会论文集.武汉:中国卫星导航学术年会组委会,2013.
[3]袁本银,高成发,柯福阳,等.GPS/VRS虚拟观测值生成与发布研究[J].测绘工程,2009,18(5):27-30.
[4]史小雨,程鹏飞,蔡艳辉,等.基于单差搜索的 GLONASS双差模糊度固定方法[J].测绘科学,2013,38(5):143-145.
[5]李成钢.网络GPS/VRS系统高精度差分改正信息生成与发布研究[D].成都:西南交通大学,2007.
[6]高星伟,李毓麟,葛茂荣.GPS/GLONASS相位差分的数据处理方法[J].测绘科学,2004,29(2):22-24.
[7]HABRICH H.Geodetic Applications of the Global Navigation Satellite System(GLONASS)and of GLONASS/GPS Combinations[D].Switzerland:University of Berne,1999.
[8]颜琳.北斗/GPS双模CORS网研制与测试技术研究[D].上海:上海交通大学,2013.
[9]李成钢.网络GPS/VRS系统高精度差分改正信息生成与发布研究[D].成都:西南交通大学,2007.
[10]张绍成.基于GPS/GLONASS集成的CORS网络大气建模与RTK算法实现[D].武汉:武汉大学,2010.
猜你喜欢
机电信息(2023年24期)2023-12-26 10:55:38
军民两用技术与产品(2022年1期)2022-06-01 06:28:50
新世纪智能(数学备考)(2021年5期)2021-07-28 06:19:46
上海大学学报(自然科学版)(2020年4期)2020-05-24 07:29:38
铁道通信信号(2018年3期)2018-04-19 02:32:44
铁道通信信号(2016年6期)2016-06-01 12:10:20
铁道通信信号(2016年3期)2016-06-01 12:10:18
中国铁道科学(2015年1期)2015-06-26 08:33:56
信息安全研究(2015年3期)2015-02-28 20:17:57
太空探索(2014年1期)2014-07-10 13:41:50