北斗接收机动态定位精度测试与分析
2014-07-25 05:17:58焦海松黄静华
导航定位学报 2014年2期
王 博,焦海松,谷 庆,黄静华
(中国洛阳电子装备试验中心,洛阳 471003)
1 引言
我国的北斗卫星导航系统(BeiDou navigation satellite system,BDS)是类似于美国全球定位系统(global positioning system,GPS)的无源定位系统。目前共有16颗北斗卫星在轨,14颗卫星正常工作,形成了5个地球静止轨道(geostationary earth orbits,GEO)卫星、5个倾斜地球同步轨道(inclined geo-synchronous orbits,IGSO)卫星及4个中圆地球轨道(medium earth orbits;MEO)卫星的组网模式,正在提供亚太大部分地区全天候24h的定位、导航和授时服务[1]。国内目前已有北斗接收机研制成功。本文研究主要目的:一是测试北斗接收机动态定位精度,二是验证差分GPS作为真值对其他同类定位设备鉴定的可行性,三是分析动态精度误差,为下一步提高动态定位精度提供参考。主要方法是以差分GPS定位数据为真值,运用 “跑车”测试法获取北斗接收机动态定位数据,通过与真值数据进行对比,获取北斗接收机动态定位误差数据,解算出动态定位精度。
2 北斗接收机动态定位误差分析
定位误差主要分为三类:1)卫星误差:星历误差、卫星时钟误差;2)传播误差:电离层延迟改正误差、对流层延迟改正误差、多路径效应、相对论效应误差;3)接收机误差:观测噪声误差、天线相位中心误差[2]、接收机钟差。
在实际工作中,可采用以下措施修正误差,提高定位精度:1)通过差分技术或二项式模拟卫星钟误差消弱卫星钟差[3];2)通过导航电文中的电离层改正模型减小电离层延迟误差[4]、采用对流层改正模型减小对流层延迟误差、在天线下设置抑制板阻挡反射波、利用天线方向图的空间特性来降低多径效应误差[5];3)避免不必要的人为操作误差。
3 北斗接收机定位精度测试
3.1 测试设备
定位精度测试设备包括硬件设备和软件设备。
硬件设备包括:北斗接收机一套(接收机、天线、电缆)、录取数据用笔记本电脑一台、通用串口RS232转USB数据线一根;GPS接收机两套(接收机、天线、馈线、存储卡)作为对比标定设备。
软件设备包括:GrafNav数据处理软件、Convert32数据转换软件和 “坐标转换”软件。设备连接如图1所示。
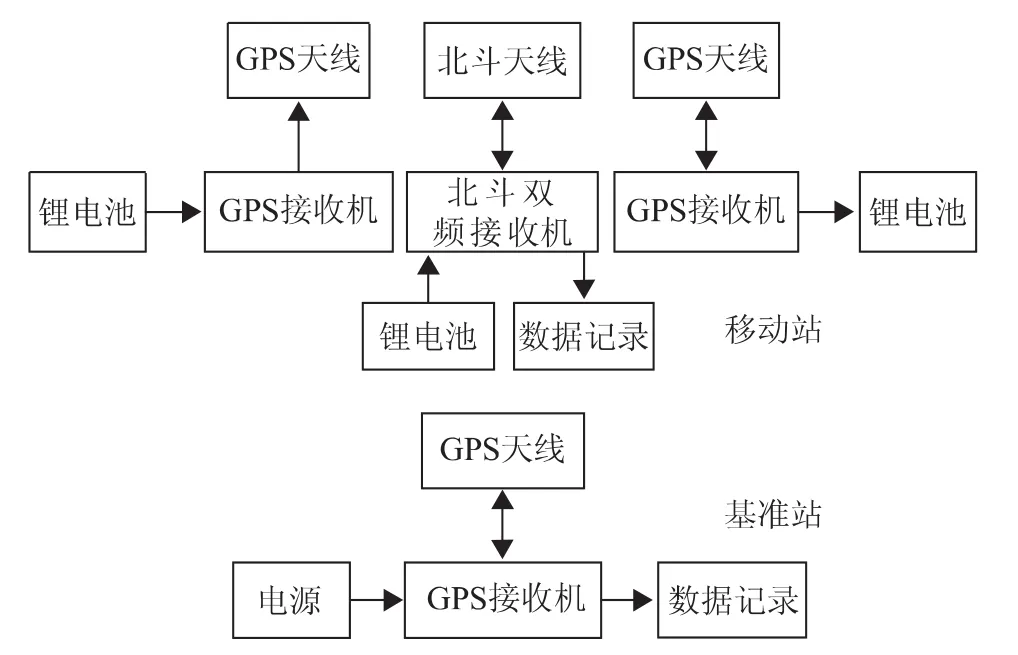
图1 动态测试设备连接图
3.2 测试地点及路线
基准站设在某指挥所GPS机房,GPS天线架于指挥所楼顶,动态定位精度测试的场所位于野外测试车内,北斗接收机和GPS接收机天线架设于野外测试车顶,两台GPS接收机天线精确水平距离为169cm,北斗接收机天线中心距离其中一套GPS接收机天线10cm。动态定位精度测试起止数据的起止时间为2013-10-11T15:08:00—16:13:00,采样率为1s。测量路线为某市环城公路。
3.3 差分GPS测量结果作为真值鉴定北斗接收机的可行性
由于在动态定位中很难找到一个绝对的 “真值”,因此,采用内部检验与外部比较相结合的办法来对实验结果进行检验。一是采用相对动态定位模式分别求解两台GPS接收机在整个运动过程中的位置,二是结合基准站数据对两台GPS接收机动态定位进行差分修正,三是解算出它们每个历元的几何距离,与地面量测的精确距离进行比对,以检验其动态精度,测试结果如图2所示。
由图2可知,解算得到的几何距离与真实距离169cm在4cm范围内波动,绝大多数数据在误差在2cm以内,曲线波动比较平稳,解算结果表明差分后的GPS数据精度很高,完全可以用其鉴定北斗接收机。
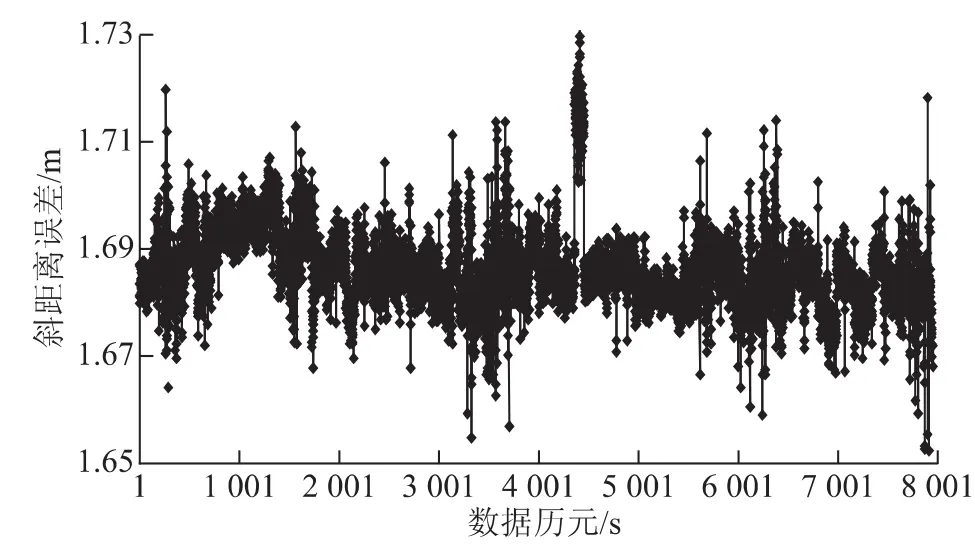
图2 双GPS天线斜距离误差图
3.4 北斗时与GPS时空系统比较
3.4.1 CGCS2000与WGS-84坐标系
我国北斗系统CGCS2000与GPS系统WGS-84同属于协议地球参考系。其坐标系坐标定义基本一致,但由于存在测轨监测站站址坐标误差和测量误差,因而定义的坐标系和实际使用的坐标系存在一定的差异。WGS84精度最初精度为1m,经过两次精化后,目前已达到5cm,CGCS2000坐标系精度也在这个水平,因而对于精度低于5cm,可以认为这两个坐标系同属于一个坐标系,不需要进行坐标转换,只需要把数据转换到同一格式即可。
3.4.2 北斗时与GPS时
北斗系统的时间基准采用北斗时(BeiDou navigation satellite system time,BDT),BDT是一个连续的时间系统,取国际单位制(SI)秒为基本单位,以周和周内秒为单位连续计数,不闰秒,并通过北斗导航电文播发。BDT起算历元时问为2006-01-01T00:00:00的协调世界时(coordinated universal time,UTC),BDT与UTC的时间偏差保持在100ns内,BDT与UTC之间的闰秒信息会在导航电文中播报[6]。
GPS系统的时间基准采用GPS时(GPS time,GPST),和BDT不同的是它的起算历元时问为1980-01-06T00:00:00的协调世界时,GPST 与UTC的时间偏差保持在100ns内,GPST与UTC之间的闰秒信息会在导航电文中播报[7]。
本文在数据比对时统一转换到UTC时,进行比较。
3.5 北斗接收机动态定位测试结果
对北斗接收机与GPS接收机真值坐标进行格式转换和时间系统转换,北斗数据与GPS真值部分数据比对如表1所示(左边数据为北斗数据)。

表1 BDS动态测量数据与GPS真值数据比对/m
ECEF-X方向数据与真值对比结果:误差数据主要在6m范围内起伏,个别误差数据达到7m。ECEF-Y方向数据与真值对比结果:误差数据主要在3m范围内起伏,个别误差数据达到4m。ECEF-Z方向数据与真值对比结果:误差数据主要在3m范围内起伏,个别误差数据达到4m。斜距离数据与真值对比结果:误差在8m。比对结果如图3~图6所示:
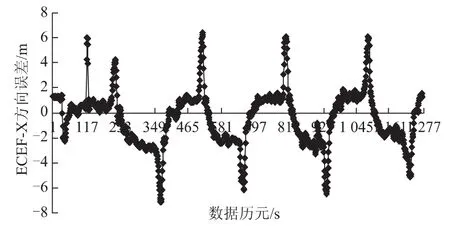
图3 北斗接收机与GPS接收机真值在ECEF-X方向误差图

图4 北斗接收机与GPS接收机真值在ECEF-Y方向误差图

图5 北斗接收机与GPS接收机真值在ECEF-Z方向误差图

图6 北斗接收机与GPS接收机真值斜距离误差图
3.6 北斗接收机与GPS接收机精度比较
GPS接收机动态数据与真值部分数据比对如表2所示(左边数据为GPS动态数据)。
表2 GPS动态数据与真值部分数据比对
GPS接收机ECEF-X方向数据与真值对比结果:误差数据主要在4m范围内起伏,个别误差数据达到5m。ECEF-Y方向数据与真值对比结果:误差数据主要在7m范围内起伏,个别误差数据达到8m。ECEF-Z方向数据与真值对比结果:误差数据主要在2.5m范围内起伏,个别误差数据达到3m。斜距离数据与真值对比结果:误差在8m。比对结果如图7~图10所示,从数据来看在ECEF-X方向北斗接收机误差大,在ECEF-Y方向GPS接收机误差大,在ECEF-Z方向误差二者精度相当,在斜距离方面二者精度相当。

图7 GPS与真值在ECEF-X方向误差图

图8 GPS与真值在ECEF-Y方向误差图

图9 GPS与真值在ECEF-Z方向误差图

图10 GPS与真值斜距离误差图
4 结束语
本文首先对影响北斗卫星导航系统定位误差的原理进行了描述,然后运用GPS接收机与北斗接收机进行了动态精度测试,最后通过测试数据与真值比对得到北斗接收机的动态定位误差数据,对定位误差数据进行定量分析并与GPS接收机精度进行了比较。在本文研究过程中,由于天气、测试时间、路线等原因,动态误差测试数据不一定具有代表性,数据量也不足,因此得出的结论可能并不适用于所有的情况。另外由于测试所使用的北斗接收机的接收级别较低,定位的精度有限,使得测试得到的数据与真值存在着不小的偏差,以至于获得的动态定位误差结果偏大。今后,随着BDS空间混合星座布局的不断完善,北斗接收机的精度还会逐步提高,再加上充分发挥短报文特色服务,届时,BDS将成为全球重要的卫星导航定位系统,甚至国际导航定位系统的领跑者。
[1]陈岩,陈晖,丁前军.“北斗二号”卫星导航系统覆盖仿真分析[J].通信技术,2009,42(6):171-173.
[2]杨元喜,李金龙,徐君毅,等.中国北斗卫星导航系统对全球PNT 用户的贡献[J].科学通报,2011,56(21):1734-1740.
[3]范龙,柴洪洲.北斗二代卫星导航系统定位精度分析方法研究[J].海洋测绘,2009,29(1):25-27.
[4]中国卫星导航定位协会.卫星导航定位与北斗系统应用[M].北京:测绘出版社,2010.
[5]赖礼楚.北斗无源定位技术研究[D].西安:西安电子科技大学,2009.
[6]尚秀星.浅谈北斗卫星导航定位系统及其应用[J].湖北成人教育学院学报,2011(3):142-143.
[7]谢劭峰,刘立龙,刘斌.GPS动态定位模型的研究[J].测绘科学,2008,33(4):29-31.
[8]李鹤峰,党亚民,秘金钟,等.北斗卫星导航系统发展、优势与建议[J].导航定位学报,2013,1(2):49-54.
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年6期)2018-11-25 09:50:18
测控技术(2018年4期)2018-11-25 09:47:22
电子制作(2018年19期)2018-11-14 02:36:40
电子制作(2017年1期)2017-05-17 03:54:35
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
智能系统学报(2015年5期)2015-12-03 05:18:20
浙江大学学报(工学版)(2015年2期)2015-05-30 07:05:04