双源组合导航系统关键算法研究
2014-07-25 05:18马宏阳程鹏飞王潜心
导航定位学报 2014年2期
马宏阳,程鹏飞,王潜心,吴 波
(1.中国测绘科学研究院,北京 100830;2.国家测绘产品质量检验测试中心,北京 100830)
1 前言
随着科学和技术的发展,高性能运动载体和高精度的武器系统对导航的准确性和可靠性提出了越来越高的要求[1-2]。例如导航系统能够提供全面、实时的导航信息;不受气候条件的限制;能够全天候工作;具有定位精度高、成本低、体积小等优点;具有很强的容错性、冗余性等。卫星/惯导组合导航是一种理想的导航系统[3-5],目前应用最多的卫星导航是美国的全球定位系统(global positioning system,GPS),但是GPS对用户有使用的权限和限制,美国可以随时关闭该系统在特定区域的服务。为了避免在军事上受制于人,而且考虑到卫星导航系统在军事和民用领域有重大的战略意义和广阔的应用前景,我国建立了自己的卫星导航定位系统,即北斗卫星导航系统(BeiDou navigation satellite system,BDS)。
我国于2012-10-25成功发射了第20颗北斗卫星,这标志着北斗(区域)卫星导航系统星座组网建设完成,开始为服务区用户免费提供开放、稳定、可靠地定位定向、实时导航、精密测速、位置报告和简短通信等六大功能,定位精度10m,测速精度0.2m,单向授时精度50ns。《北斗卫星导航系统空间信号接口控制文件公开服务信号B1I(1.0版)》于2012-12-27正式发布,为全世界北斗系统开发商敞开了准入大门。
在捷联惯导系统(strapdown inertial navigation system,SINS)中加入BDS构成组合导航系统,将北斗卫星提供的三维位置、三维速度与精确的时间信息作为观测量,对整个组合系统的状态变量进行最优估计,以获得高精度的导航信息。可在保持系统自主性的前提下,尽可能的克服SINS误差随时间积累的缺点,并且提高卫星导航系统抗干扰能力。系统可以提供一个实时的载体运动参数(三维位置、速度和姿态)及时间信息。
2 BDS/SINS组合导航理论
BDS和SINS单系统各有优缺点。BDS的优点是精度较高、与时间不相关和成本低。其缺点是抗干扰能力有限、复杂电磁环境下难以定位、高动态环境下卫星容易失锁。而对于惯性导航系统而言,其优点是完全自主、保密性好、全天候和不受外界环境影响。但其缺点也显而易见,定位误差随时间积累,对惯性元件质量要求苛刻等。
综合可知,BDS与惯性导航系统各有所长,且具有互补性。如果将两者组合,能充分发挥各自的优点,弥补不足。BDS与惯性导航系统之间的组合,根据组合的深度不同,通常可以分为三种组合方式,分别为松组合、紧组合和超紧组合[6]。
2.1 松组合
在松组合方式下,BDS与SINS各自独立工作。通过把北斗接收机确定的载体位置和速度信息与SINS输出的位置和速度信息的组合解算,结合卡尔曼滤波器估计出惯导系统各部分误差实现惯导系统校正。其核心是北斗接收机对惯导进行辅助,抑制惯导系统的误差积累。其原理如图1所示。
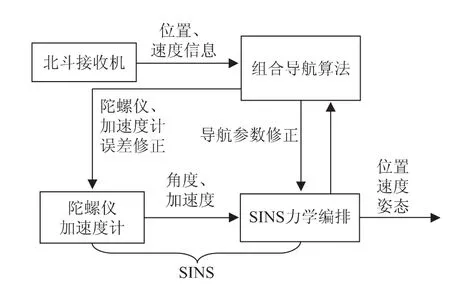
图1 松组合原理图
在松组合方式中,北斗接收机与SINS的硬件模块都不需要改变,只需要增加组合导航模块。组合导航模块的功能是对来自于两个系统的导航信息实现融合计算。但由于模块相互独立,因此组合导航信息无法反馈回接收机内部进行辅助与修正。因此松组合虽然实现简单易行,能够有效提高系统的导航精度,但卫星接收机抗干扰性能无法得到增强,一旦单个子系统误差增大,组合导航的精度就会下降。
2.2 紧组合
紧组合的原理是将北斗接收机给出的中间量伪距和伪距率作为原始值同SINS计算出的伪距和伪距率的估值进行组合解算。该方案不仅较松组合可以提供更高的精度,而且只需采用北斗接收机原始信息而不使用其解算结果,因此即使接收机观测不足4颗卫星时,该算法仍能提供较高的精度。其原理如图2所示。
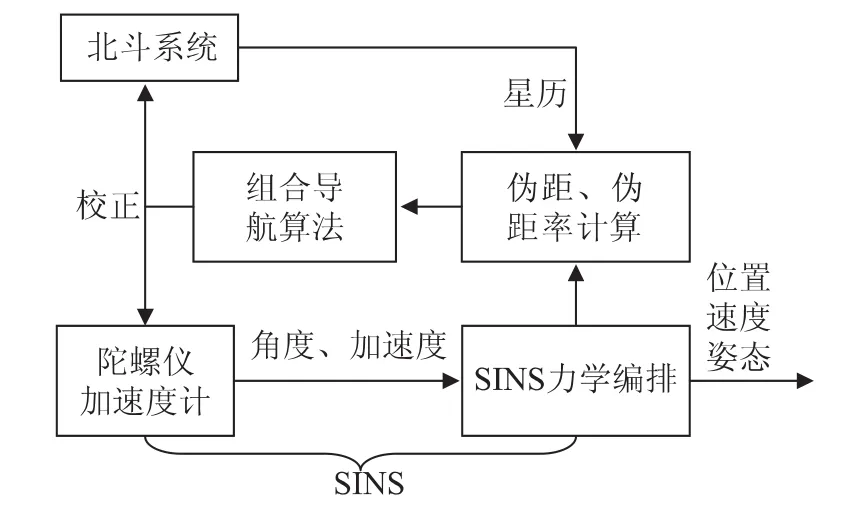
图2 紧组合原理图
紧组合模式的特点是通过组合导航模块将卫星接收机与SINS系统的软硬件通过组合导航模块有机结合,从而实现相互辅助的作用。组合导航模块利用卫星接收机输出的星历数据、SINS输出的位置和速度计算出基于SINS信息的伪距和伪距率,并将两值与北斗接收机测量得到的相应观测量的差值作为测量值,再利用卡尔曼滤波器估计北斗接收机和SINS的误差,然后对两个系统进行校正[7]。
2.3 超紧组合
超紧组合的主要特点是SINS的信息用于辅助北斗接收机内卫星信号捕获和跟踪环,因此需要改变北斗接收机内部结构。该组合方式利用惯性传感器的输出值辅助载波相位跟踪环,可减少跟踪环的带宽。可提高接收机动态性能,又同时可抑制接收机的噪声。其原理如图3所示。
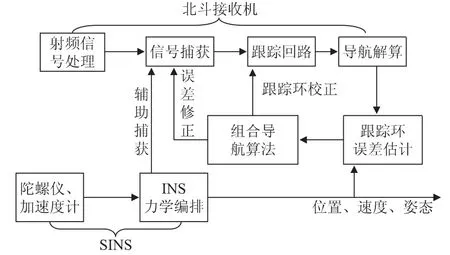
图3 紧组合原理图
3 伪距、伪距率组合理论
3.1 组合系统量测方程
3.1.1 伪距测量方程
在紧组合系统中,采用纬度、经度、高度表示载体的真实地理位置,此时载体在地固系中的位置可以表示为
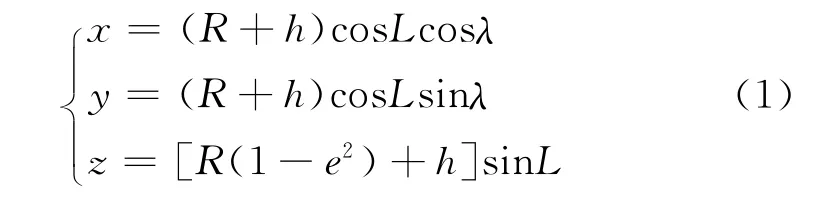
假设第i时刻SINS输出的载体位置用(xi,yi,zi)表示,第j颗卫星在地固系下的位置为(,,),则卫星到载体的几何距离为

若载体真实位置为 (x,y,z),则考虑SINS输出坐标误差

式(4)中,载体到卫星真实距离ρj可表示为
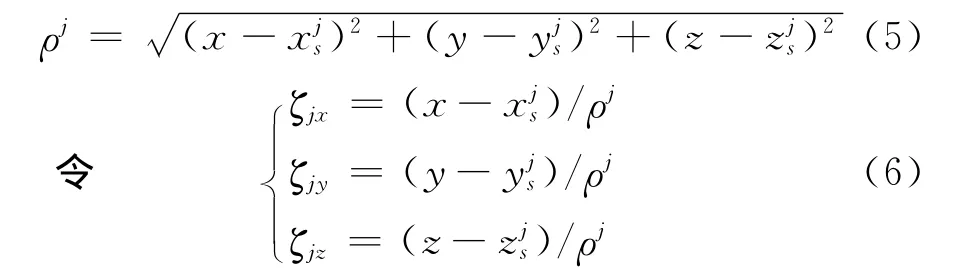
联合式(4)和式(6),得

由北斗接收机测量得到的它与第j颗卫星之间的伪距为

式(8)中,δtρ为北斗接收机钟与卫星钟之间的钟差引起的等效距离误差、该误差是伪距测量中的主要误差,vj为多路径效应、对流层延迟模型、电离层等引起的等效距离误差。
由式(7)和式(8)可得组合导航系统伪距差量测方程为

因此,伪距差量测矩阵可表示成

式 (10)中,δρ = [δρ1δρ2… δρn]T,D= [1 1 … 1]T;V= [v1v2…vn]T,
n为观测到的卫星个数。
最后得伪距量测方程为

式 (11)中,H(t) 为 状 态 转 移 方 程,H(t)=[0E0D0]。
3.1.2 伪距率量测方程
伪距率为载体位置至卫星的距离变化率,假设载体的真实位置为 (x,y,z),则它至第j颗卫星的距离变化率为

类似式(6),式(12)可写为

式(8)为SINS输出的载体位置至第j颗卫星的伪距,对其求导得

北斗接收机测量得到的载体至第j颗卫星伪距率为

因此,组合导航系统伪距率差测量方程为

伪距率差量测方程矩阵可以表示为

依据上述推导,可得组合导航系统伪距率量测方程为

联立式(11)及式(18),可得伪距、伪距率组合量测方程为

3.2 组合系统状态方程
取 SINS的状态方程为[8]:

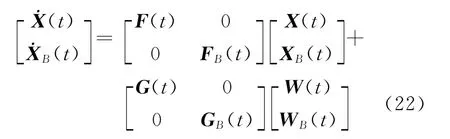
北斗接收机的误差状态方程一般取两个与接收机钟相关的状态量,一个是接收机钟差引起的等效距离误差,另一个是接收机钟频率误差引起的等效距离变化率误差。北斗接收机的状态方程可以表示为

式(21)中,状态XB(t)= [δtρ]、δtρ为收机钟差引起的等效距离误差,为接收机钟频率误差引起的等效距离变化率误差。
联合式(20)和式(21),可得组合导航状态方程为
4 北斗卫星信号
4.1 北斗卫星信号的测距码
北斗卫星信号的测距码是伪随机码,其实质是一种Gold码。它由两个线性序列构成,并分别由两个11级线性移位寄存器生成,分别称为G1序列和G2序列。星座的每一颗卫星都有唯一的测距码,它们通过G1序列和一定相位偏移的G2序列生成,具体生成方法可见北斗系统ICD文档。BDS在设计时一共选择了37个测距码,G1和G2序列生成多项式为

处理伪随机码信号的根本是它的强自相关性。其自相关性函数表达式为

式(24)中,ci(t)表示第i颗卫星的伪随机码,T为伪随机码周期,T=NTc,Tc为码长度,N=2n-1,这儿n=11是线性移位寄存器的位数。
4.2 卫星信号模拟与捕获
现阶段BDS由5颗地球静止轨道卫星(geosynchronous earth orbit,GEO)、5颗倾斜地球同步轨道卫星(inclined geosynchronous satellite orbit,IGSO)和4颗中圆地球轨道卫星(medium earth orbit,MEO)组成,其中,BDS特有的GEO+IGSO卫星的轨道组成方式,以尽可能少的卫星,覆盖了亚太及周边大部分地区。GEO和IGSO卫星轨道如图4所示。

图4 GEO、IGSO卫星轨道
根据 《北斗卫星导航系统空间信号接口控制文件公开服务信号B1I(1.0版)》,调制在民用B1频点的信号由I、Q两个支路的测距码和导航电文正交调制在载波上构成,其导航信号的格式可以表示为

式(25)中,I(t)、Q(t)为调制在I、Q 支路上的测距码,AI、AQ为I、Q支路上的测距码振幅,DI、DQ为调制在I、Q支路上的数据比特,φI、φQ为调制在I、Q支路上的初相,f为B1频点的载波频率,f=1 561.089MHz。
北斗卫星采用码分多址(code division multiple access,CDMA)技术,每颗卫星发射信号的载波频率相同,但每一颗卫星都有各自唯一的测距码,它们的信号格式与式(25)相同。仿真中采用的信号中频为1.25MHz,测距码速率为2.046MHz,信号采样频率为5.115MHz,B1频点信号频率为1 561.098MHz。信号中加入高斯白噪声,仿真信号如图5所示。
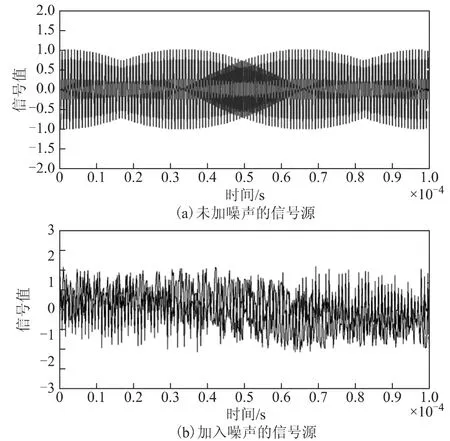
图5 卫星信号
卫星信号的捕获就是接收机确定接受到的信号来自哪颗卫星以及确定该卫星信号的多普勒频移和测距码的相位。就CDMA系统而言,不同信号源发射的信号通过不同的伪随机码区分开来,它们可以共享相同的载波频率和时间[12]。接收机捕获信号的方法主要可以分为线性搜索、并行平率搜索和并行码相位搜索。其中线性搜索是最基本的信号搜索捕获算法,它是将搜索范围按照频率和相位划分为很多个搜索单元,依次在多普勒频移和伪距相位方向进行搜索捕获[13-14]。本文采用线性捕获,捕获结果如图6所示。从图6中可以看出,当捕获到卫星信号时,测距码相关值可以看出明显的尖峰,由此也可以判断出所捕获的该卫星信号的多普勒频移和测距码相位。
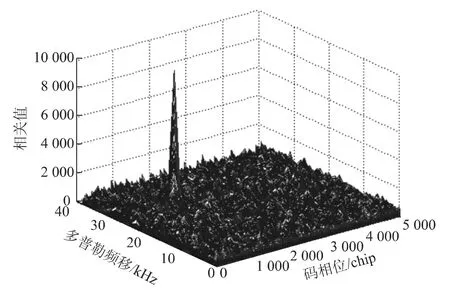
图6 卫星信号捕获结果
5 组合导航系统仿真分析
5.1 仿真设计
对于运动的载体,导航系统是时变的,因此首先要对飞行轨迹进行设计,以提供仿真量测值。为了分析各种飞行状态下的组合导航性能,设计的飞行轨道涵盖各种飞行状态,能够仿真滑跑起飞、进入爬升、爬升飞行、飞机改平、加速飞行、右倾斜、右盘旋、退出盘旋、减速飞行、降落等飞机各阶段的飞行特性[9-11],并考虑了不同飞行过程中的空气阻力,设计的飞行轨迹见图7,仿真时长2 000s。
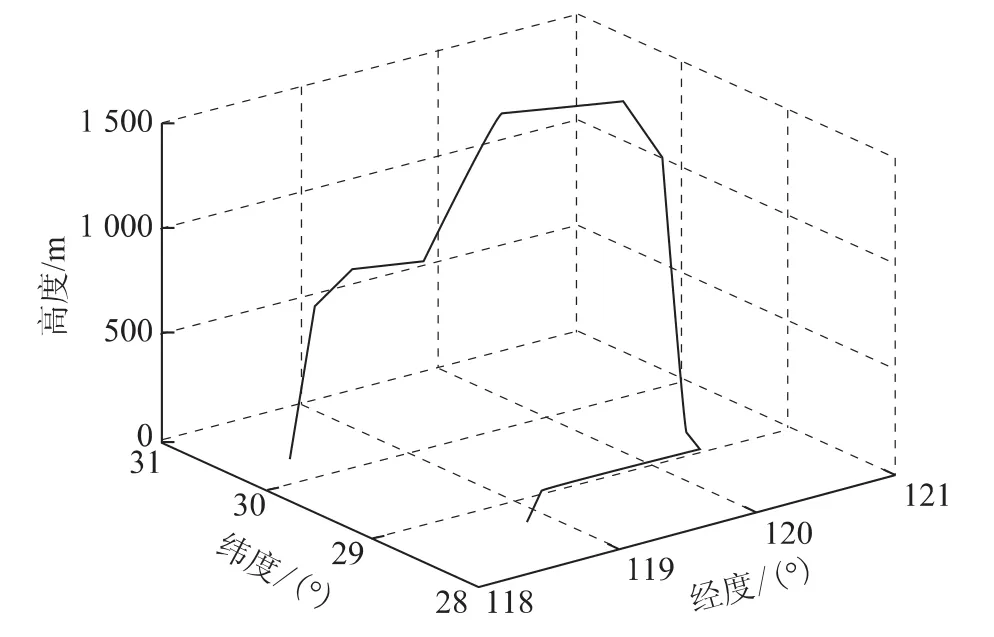
图7 飞行轨迹
惯性器件仿真包括陀螺仪仿真和加速度计仿真两部分,其设计的基本思想是在飞机轨迹的真实姿态和加速度的基础上加入陀螺仪和加速度计的误差。陀螺仪的误差包括常值偏差、一阶马尔科夫过程和白噪声等。加速度计的误差包括加速度计零偏和一阶马尔可夫过程等。具体仿真流程如图8所示。
在伪距、伪距率组合导航系统中,假设采用一台北斗接收机沿飞行轨迹测量飞机的运动状态,北斗接收机的伪距、伪距率白噪声均方差分别为5m、0.1m/s。惯导平台初始失准角取0.03°E、0.03°N、天向0.05°;陀螺漂移为0.1(°)/h,等效加速度计零偏为10-4g,飞机初始位置118.85°E、28.67°N,初始航向0°。

图8 组合导航仿真流程图
5.2 仿真结果与分析
经仿真平台后得到的平台失准角、位置误差和速度误差分别如图9~图11所示。

图9 平台失准角
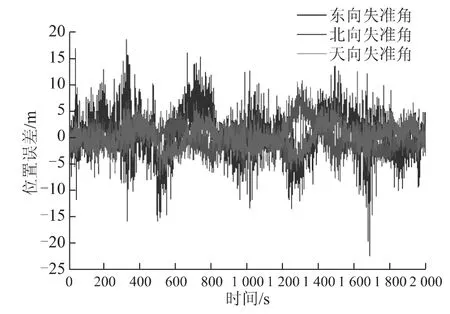
图10 位置误差
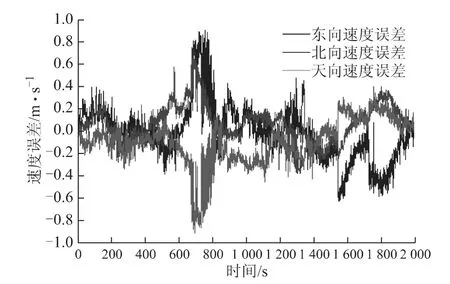
图11 速度误差
从以上仿真结果中可以看出,经滤波处理后,东向、北向失准角在200s左右就已经收敛,而天向失准角收敛情况较差;东向和北向的位置误差优于10m,天向位置误差在20m之内;三个方向的速度误差优于1m/s。另外,在飞机飞行姿态改变的时刻(比如转弯、拉升、俯冲),位置误差和速度误差都出现了比较大的波动(例如第300s、500s、700s、1 000s、1 300s、1 700s等),而且这种波动在天向位置误差中表现尤其明显。产生的原因是载体的运行姿态发生较大的变化时,陀螺仪和加速度计的输出值出现较大改变,增大了空气阻力等随机误差带来的影响。
6 结论与展望
本次仿真实验证明了BDS/SINS组合导航系统的可行性,并可以达到比较理想的导航精度。组合导航系统不仅克服了惯性导航误差随时间积累的缺点,同时发挥了惯性导航自主性、完备性和BDS全球性、高精度等优点。
鉴于本次仿真实验的局限性,BDS/SINS组合导航系统实际应用中许多问题都没有顾及,例如对BDS、SINS的数据进行滤波处理时是以假设两子系统的数据同步为前提的,但在实际工程应用中这种假设是不恰当的。因为北斗接收机和SINS各自采用独立的时钟频率标准,即使北斗接收机和SINS同时启动,其数据间的时标差也会随着系统工作时间的递增而累积;又如BDS误差源较多,但本次实验仅考虑了时钟偏差和时钟漂移,理论上难以对伪距、伪距率误差实现精确补偿。另外,紧组合是高水平的组合模式,设计紧组合时通常要把卫星接收机作为一块电路板嵌入到SINS部件中实现导航系统设计的一体化,这要求设计者完全掌握北斗接收机和SINS的工作原理,并能够对系统的软件解算过程与硬件部分进行修改。以上问题,都需在以后的工作逐步开展研究。
[1]GROVES P D.Principles of GNSS,Inertial and Multi-sensor Integrated Navigation Systems[M].Norwood:Artech House INC.,2008.
[2]张国良,曾静.组合导航原理与技术[M].西安:西安交通大学出版社,2008.
[3]马云峰.MSINS/GPS组合导航系统及其数据融合技术研究[D].南京:东南大学,2006.
[4]唐康华.GPS/MIMU嵌入式组合导航系统关键技术研究[D].长沙:国防科技大学,2007.
[5]BUCK T M,WILMOT J,COOK M J.A High G,MEMS Based,Deeply Integrated,INS/GPS,Guidance,Navigation and Control Flight Management Unit[EB/OL].(2006-10-30)[2013-08-26].http://www.dtic.mil/ndia/2006targets/Buck.pdf.
[6]龚真春,宋执环.嵌入式 GPS/MIMS组合导航系统的设计与应用[J].计算机工程与应用,2005(9):108-111.
[7]ALBAN S,AKOS D M,ROCK S M.Performance Analysis and Architectures for INS-aided GPS Tracking Loops[EB/OL].[2013-08-26].http://waas.stanford.edu/papers/AlbanIONNTM03.pdf.
[8]项冬.高精度机载INS/GPS组合导航关键算法研究[D].北京:中国测绘科学研究院,2013.
[9]范立钦,周鼎义.飞机空气动力学[M].西安:西北工业大学出版社,1989.
[10]赵鸿,赵忠,龙国庆.捷联惯性导航系统飞行轨迹数据生成与惯性器件建模[J].系统仿真学报,2005,17(5):1026-1029.
[11]王行仁.飞行实时仿真系统及技术[M].北京:北京航空航天大学出版社,1998.
[12]胡延锋.码分多址在卫星通信中的应用[J].微波与卫星通信,1995(3):5-11.
[13]李小捷.弱信号环境下的GNSS信号捕获研究[D].西安:西安电子科技大学,2012.
[14]赵普.北斗二代卫星导航接收机共性技术研究[D].上海:复旦大学,2010.
猜你喜欢
地理空间信息(2022年10期)2022-10-31
导航定位学报(2022年1期)2022-02-17
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
百科探秘·航空航天(2016年9期)2016-12-01
电子制作(2016年1期)2016-11-07
太空探索(2015年5期)2015-07-12