
具有参数区间不确定的协调器保性能优化
2014-06-27 05:41石海军钱林方李淼
兵工学报 2014年2期
石海军,钱林方,李淼
(1.南京理工大学机械工程学院,江苏南京 210094;
2.南京南瑞集团公司智能化电气设备研发中心,江苏南京 211100)
具有参数区间不确定的协调器保性能优化
石海军1,2,钱林方1,李淼1
(1.南京理工大学机械工程学院,江苏南京 210094;
2.南京南瑞集团公司智能化电气设备研发中心,江苏南京 211100)
为了解决协调器优化设计中的不足,提出了基于参数区间不确定分析的保性能优化方法。该方法考虑工程设计中关键尺寸或材料参数变化的区间性,通过将参数区间变化从参数变差空间映射到目标和约束空间,得到的目标和约束性能退化估计作为原优化问题的附加约束,形成外层、内层的优化结构。某火炮协调器的优化结果证明了该方法在解决具有参数区间不确定的复杂工程优化问题上的有效性。
兵器科学与技术;区间不确定;保性能优化;协调器
0 引言
传统优化设计是基于确定性模型的,即材料特性、载荷、几何尺寸、元器件参数等在优化过程中不存在摄动影响。然而在实际工程问题中,这些参数或多或少会受到外界干扰而产生摄动,进而影响设计的优化目标性能或改变约束的可行性[1-2]。近年来,针对参数不确定性问题,国内外学者提出了许多方法。一般而言,这些方法基于两类模型:概率模型和非概率模型。在基于概率的模型中,参数的不确定性由概率密度函数来描述。与之对应的优化问题是在规定的失效概率下最小化设计成本(即可靠性设计优化)[3-4]或者同时最小化目标函数均值和结构响应方差(即鲁棒设计优化)[5-6]。由于基于概率模型的优化能够得到高置信度和高鲁棒性的设计,所以它成为结构鲁棒设计的有力工具。尽管概率模型提供了鲁棒设计的有效框架,但是值得注意的是,它有时很依赖于不确定参数的精确概率分布信息,然而这些信息在实际工程设计问题中很难或不可能获得。与概率不确定模型不同,非概率模型只需要假设不确定参数的变化范围,不要求统计学意义上的概率分布信息[7-10]。由于实际产品在设计和加工过程中,均给定一个确定的公差尺寸,而不是一个确定的概率分布,故而基于参数区间不确定模型的研究很有实际意义。
本文针对某中口径火炮协调器的传统优化解不能满足设计要求的问题,提出了基于参数区间不确定的保性能优化方法。通过该方法得到的鲁棒解,在系统参数存在区间不确定的情况下,仍然满足设计要求。
1 协调器优化问题描述

图1 某火炮协调器机电液一体化模型Fig.1 Integrative model of mechanics-electronics-hydraulics of a shell transfer arm
火炮协调器是自行火炮供输弹系统的一个重要部件,是连接弹仓与输弹器、药仓与输药器的纽带,其作用是负责从弹仓和药仓中接受弹丸和装药模块,将它们传输到炮尾后部,并实现与炮膛轴线的对齐,经输弹机和输药机把弹丸和模块药分别可靠、一致地推入药室[11]。协调器由机械臂、液压系统和电气控制系统组成,是一个典型的机电液控系统,如图1所示。转换电路、控制器、信号放大电路等,其作用是根据期望输入对液压及机械子系统进行控制;机械子系统包括液压缸本体、协调臂本体及弹丸抱夹机构,负责执行液压输出,完成预期的协调任务;液压子系统由液压泵、蓄能器、伺服阀及其他辅件组成,主要对电气控制信号作出响应,驱动液压缸动作。协调器存在多个设计变量,本文主要考虑PD控制器的比例增益Kp、微分增益Kd、传感器增益Ka、功率放大器增益Kf、液压缸内径D、活塞杆直径d、协调臂上液压缸活塞支点位置L,其中D和d取离散值。
1.1 协调器模型
1)电气控制器模型。电气控制系统通过安装在协调臂转轴上的角位移传感器检测到协调臂当前转角信号θ,经模数转换,结合期望转角θd,则转角误差e=Kaθ-θd.然后通过PD控制器,输出控制电流,经功率放大器放大,得到电流控制信号控制液压系统作动。其工作原理如图2所示。则电气控制输出为


图2 PD控制回路Fig.2 PD controller
2)液压伺服阀模型。液压系统中由于存在蓄能器和溢流回路,所以假设供油压力基本保持不变。伺服阀的输入为阀芯的位移,其流量qL与阀芯位移xs之间的关系为

式中:ω=πd,d为阀芯凸肩直径;xs=Ksi,Ks为伺服阀增益,i为输入电流;Cd为流量系数;ρ为油液密度;ps为供油压力;pL为液压缸工作压力,其值由工作负载决定。
3)液压缸模型。液压缸为机械系统的执行元件,输入为油液压力,输出为活塞杆速度,如图3所示。

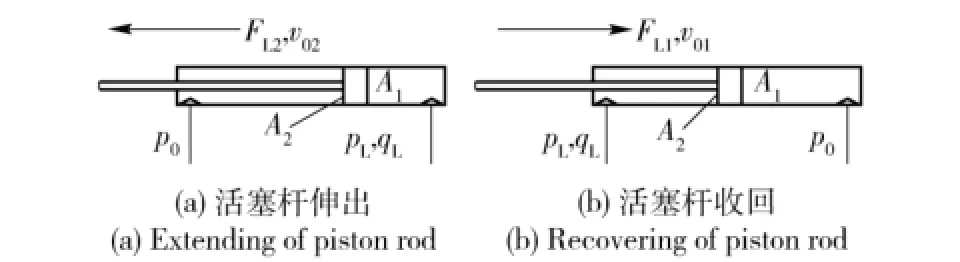
图3 液压缸模型分析Fig.3 Analytical model of hydraulic cylinder
4)机械臂本体动力学模型。机械臂在液压缸活塞杆B点驱动下,绕点A旋转,液压缸与机械臂所成夹角为α,FL为液压缸负载,即作用在协调臂上的驱动力;v0为液压缸活塞输出速度,当活塞杆伸出时v0=v02,反之v0=v01.设机械臂质量为m,转动惯量为J,质心距点A的距离为L,机械臂转角为θ,其他参数如图4所示。分析可知机械臂上B点的速度为
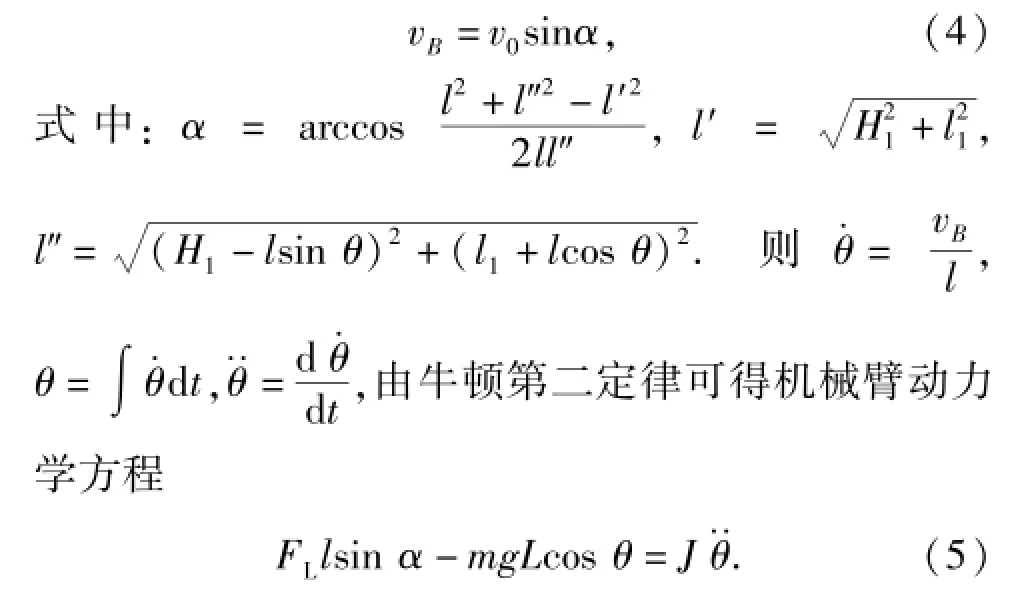
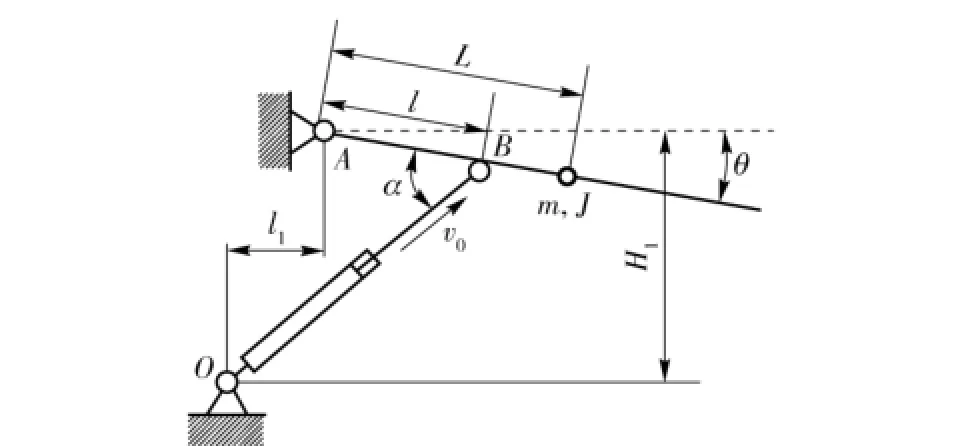
图4 机械臂本体模型Fig.4 Mechanical arm model
则液压缸负载为

1.2 优化的数学模型
为了使液压缸活塞杆在整个协调过程中受力均衡分布,协调器设计要求在超调量不超过σ0,上升时间不超过0.5 s的约束条件下,最小化液压缸活塞杆受力的最大值,由于力存在方向性,故而取标量(其绝对值的最大值)作为目标。其数学模型如下:
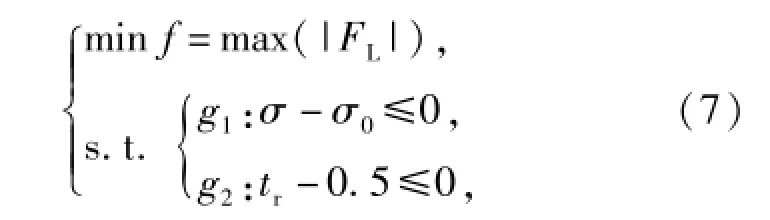
式中:σ0为允许的超调量,σ0=1.5%;tr为上升时间。
1.3 不确定问题
按照(7)式的优化模型进行仿真分析,优化结果如表1所示,求得的目标函数值为6 670 N,约束函数值分别为-0.136、-0.014.可以看出约束g1、g2均为有效约束。但是在实际生产和使用过程中,存在许多不确定因素,如随温度变化的传感器增益、放大器增益、装配误差等。本文考虑Ka、Kf、L及ps这4个设计变量和参数存在摄动,且摄动幅值分别为0.005、0.005、3 mm和0.2 MPa,利用Matlab随机生成按正态分布规律的20组摄动数据。模拟系统参数的不确定性,分析结果如图5~图7所示。图5是20组随机摄动下活塞杆的受力相对优化结果的偏差,图6、图7分别为两个约束函数在摄动数据下与优化结果中的约束值之间的偏差,虚线为约束的最大退化许可值。

表1 设计优化结果Tab.1 Results of design optimization

图5 随机摄动对活塞杆受力的影响Fig.5 The effect of random perturbation on force applied on piston rod
可以看出,在参数不确定的情况下,活塞杆受力出现波动,最大增加了约300 N,同时系统出现了违背约束g1、g2的情况,即在实际生产过程中,按照给定的设计公差加工或装配出的协调器不能完全满足设计要求,故而必须考虑参数区间不确定对系统性能的影响。

图6 随机摄动对约束g1的影响Fig.6 The effect of random perturbation on the constraint g1
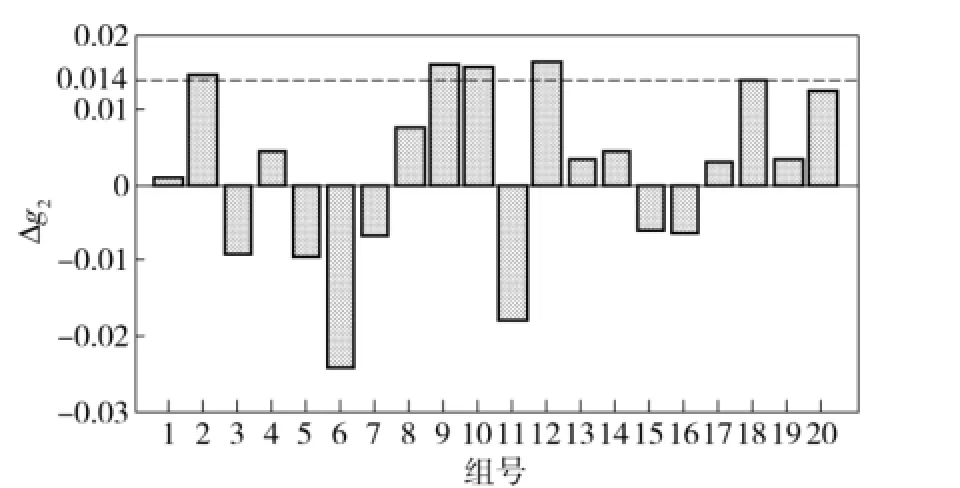
图7 随机摄动对约束g2的影响Fig.7 The effect of random perturbation on the constraint g2
2 参数区间不确定的保性能优化
2.1 参数区间不确定保性能优化
对于设计变量标称值x0及参数标称值p*,对应的目标函数及约束函数标称值用f0、g0表示,参数p (包括不确定的设计变量)变化下界、上界分别为pL和pU,对应的目标函数变化为Δf,图8所示以2个不确定参数与2个目标函数为例,图8(a)所示参数为线性相关,本文所提方法同样适用非线性情况。从图中可以看出,在参数存在不确定的情况下,目标函数性能可能会出现“退化”现象,约束函数与目标函数相似,也会出现类似退化,对于起作用的约束,可能会出现违背原始约束的情况。
为此人为规定一个可接受的目标退化域Δfk,0(AODR),如图8(b)所示,若目标函数的性能变化范围在AODR内,那可以认为优化解可以接受。于是对于具有望小特性的目标函数,设计点的最大退化估计可表示为

对于望目特性的目标函数,可采用原函数的付函数构造新目标函数,则新目标函数具有望小特性,完全可由(8)式求得;对于望目特性的目标函数,其最大退化估计可表示为

图8 参数空间、目标空间Fig.8 Parameter space and objective space

以具有望小特性的目标函数为例,设计点对性能满足的程度用目标性能退化指标Rf描述
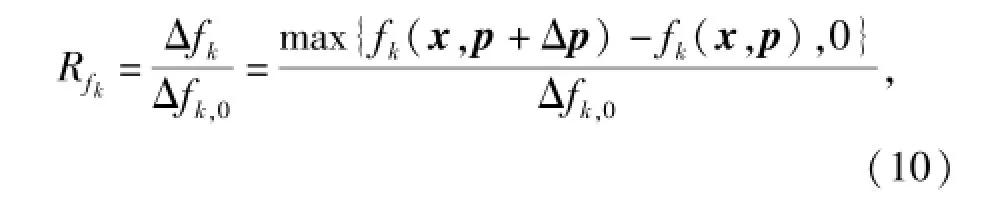
式中:0≤k≤K,K为目标函数个数。可见,当Rf≤1时,目标函数性能变化区域在AODR内,解满足设计要求。
与目标性能退化估计类似,假设在点x约束函数可行,即gm(x,p)<0,0≤m≤M,M为约束函数个数。此时约束函数可接受的最大退化Δgm,0= |gm(x,p)|,那么约束可行性的最大退化估计Δgm和退化指标Rgm可以表示为

若所有的目标性能和约束可行性的灵敏度区域均在可接受性能退化范围内,那么设计优化结果满足性能优化条件,用性能优化指标R来描述,则也即,将性能优化指标R≤1作为原优化问题的一个附加约束,那么即使存在不确定因素,优化结果也必定满足设计要求。

(10)式和(12)式所示的性能优化指标可以变换为

式中:p取∞,即表示无穷大范数。扩展而言,也可根据具体情况取p=1(1-范数)或2(2-范数)来作为性能优化指标的一种度量。
2.2 数学模型
由于不确定参数及变量的存在,(7)式所描述的优化模型变为如下形式:

式中:R由(13)式给出;R0为决策者期望的鲁棒程度。这样,(7)式所描述的优化模型就转变为内层优化求R的极大值、外层优化求原目标函数极小值的问题,如图9所示,其中K=1,M=2.
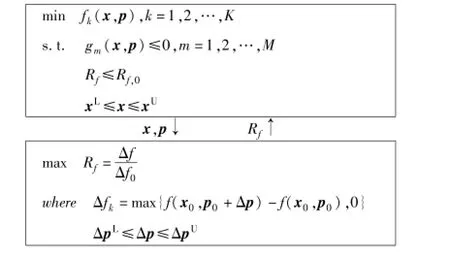
图9 性能鲁棒优化的双层优化框架Fig.9 Double-layer framework of performance robustness
3 优化结果分析
由于模型复杂,计算量较大,为了提高计算效率,本文采用径向基函数(RBF)近似技术构建计算模型。外层优化采用进化计算算法,最大进化代数取400,内层优化采用非线性规划。于是对(15)式给出的鲁棒优化模型进行求解,其优化结果在表2中给出,求得的目标函数值为9 150 N,约束函数值分别为-0.4、-0.021.
为了和传统优化结果进行对比,采用相同的摄动数据进行分析,其结果如图10~图12所示。图10为重新优化后在摄动数据下活塞杆受力相对优化结

表2 设计优化结果Tab.2 Results of guaranteed cost optimization
果的变化情况,图11、图12分别为2个约束函数在摄动数据下与优化结果中的约束值之间的偏差,虚线为约束退化的最大限制。从图中可以看出,在摄动存在的情况下,原优化结果使得活塞杆受力特性变差,最大高出设计标称值约300 N,而经保性能优化后,活塞杆受力均得到改善,只有极少部分会超出设计标称值,最大增加约100 N,同样优于原设计;约束函数g1、g2的值在标称值上下变化,但是均未超出其最大限制,说明该方法能够有效解决具有参数区间不确定的协调器优化问题。
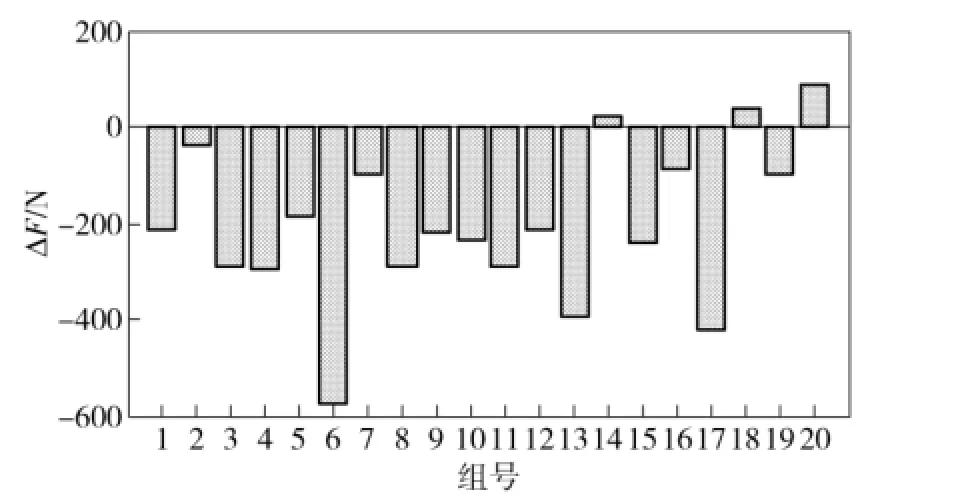
图10 活塞杆受力在摄动数据下的变化Fig.10 Variation of force applied on piston rod with perturbed data
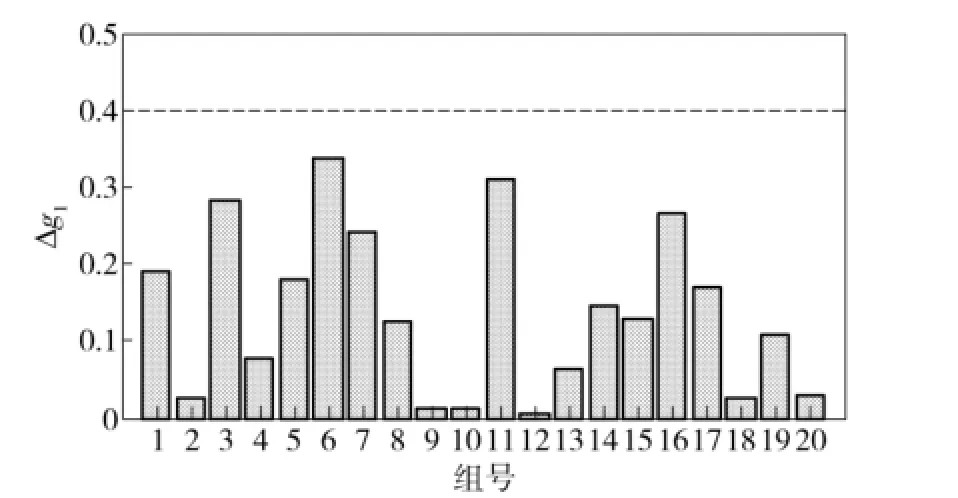
图11 约束g1在摄动数据下的变化Fig.11 Variation of the constraint g1with perturbed data
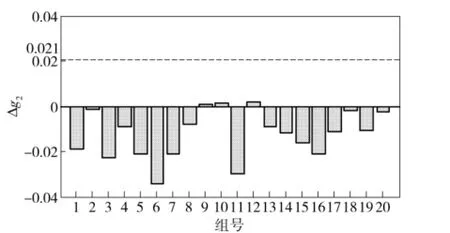
图12 约束g2在摄动数据下的变化Fig.12 Variation of the constraint g2with perturbed data
通过以上分析可知,本文提出的保性能优化方法可以保证目标函数性能不退化,同时也能够使优化解在参数区间不确定存在的情况下具有良好的鲁棒性。
4 结论
由于实际工程设计及生产过程中,零部件的加工与装配尺寸均用精度公差配合来表示的;在使用过程中,环境温度的变化、电子元器件的特性变化也是区间变化的。传统的设计优化方法针对的是确定型优化模型,所以求得的设计解不能完全满足原始设计要求;而基于概率模型的优化方法需要较精确的概率分布信息,在火炮武器装备使用及管理过程中较难获取。本文从参数区间变化的角度出发,将参数区间变化从参数变差空间映射到目标和约束空间,得到的目标和约束性能退化估计作为原优化问题的附加约束,形成双层优化结构。通过某火炮协调器设计优化的对比分析,可以看出,在解决具有参数区间不确定的复杂工程优化问题上,该方法有很好的应用参考价值。
References)
[1] Lin X X,Janak S L,Floudas C A.A new robust optimization approach for scheduling under uncertainty:Ⅰ.bounded uncertainty [J].Computers and Chemical Engineering,2004,28(6/7): 1069-1085.
[2] Beyer H G,Sendhoff B.Robust optimization-a comprehensive survey[J].Computer Methods in Applied Mechanics and Engineering,2007,196(33/34):3190-3218.
[3] Du X X,Huang B Q.Reliability-based design optimization with equality constraints[J].International Journal for Numerical Methods in Engineering,2007,72(11):1314-1331.
[4] Lee I,Choi K K,Du L,et al.Dimension reduction method for reliability-based robust design optimization[J].Computers and Structures,2008,86(13/14):1550-1562.
[5] Shin S,Samanlioglu F,Cho B R,et al.Computing tradeoffs in robust design:perspectives of the mean squared error[J].Computers&Industrial Engineering,2011,60(2):248-255.
[6] 郭惠昕,岳文辉.含间隙平面连杆机构运动精度的稳健优化设计[J].机械工程学报,2012,48(3):75-81.
GUO Hui-xin,YUE Wen-hui.Design optimization of planar linkage mechanism with joint clearance for improving the robustness of kinematic accuracy[J].Chinese Journal of Mechanical Engineering,2012,48(3):75-81.(in Chinese)
[7] Li M,Azarm S,Boyars A,et al.A new deterministic approach using sensitivity region measures for multi-objective robust and feasibility robust design optimization[J].Journal of Mechanical Design,2005,128(4):874-883.
[8] 张曙光.不确定结构分析及优化中的区间模型[J].长春工程学院学报:自然科学版,2009,10(3):1-3.
ZHANG Shu-guang.Interval model of uncertain structure analysis and optimization[J].Journal of Changchun Institute of Technology:Natural Science Edition,2009,10(3):1-3.(in Chinese)
[9] 董荣梅,孙伟,许焕卫.基于区间分析的非概率稳健优化设计[J].大连理工大学学报,2011,51(1):51-55.
DONG Rong-mei,SUN Wei,XU Huan-wei.Non-probabilistic robust optimization design based on interval analysis[J].Journal of Dalian University of Technology,2011,51(1):51-55.(in Chinese)
[10] 李方义,李光耀,郑刚.基于区间的不确定多目标优化方法研究[J].固体力学学报,2010,31(1):86-92.
LI Fang-yi,LI Guang-yao,ZHENG Gang.Uncertain multi-objective optimization method based on interval[J].Chinese Journal of Solid Mechanics,2010,31(1):86-92.(in Chinese)
[11] 侯保林,樵军谋,刘琮敏.火炮自动装填[M].北京:兵器工业出版社,2010:13.
HOU Bao-lin,QIAO Jun-mou,LIU Cong-min.The autoloader for self-propellant howitzer[M].Beijing:The Publishing House of Ordnance Industry,2010:13.(in Chinese)
Guaranteed Cost Optimization for the Shell Transfer Arm with Interval Uncertainty
SHI Hai-jun1,2,QIAN Lin-fang1,LI Miao1
(1.School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,Jiangsu,China;
2.Intelligent Electrical Equipment R&D Center,Nanjing NARI Group Co.Ltd.,Nanjing 211100,Jiangsu,China)
A guaranteed cost optimization method based on analysis of parameter interval uncertainties is proposed to overcome the disadvantage in design optimization of shell transfer arm.In this proposed method,the interval characteristic of key dimensions or material parameters in the engineering design is considered,and the parameter perturbations are mapped from variation space into objective and constraint spaces,then the obtained degraded-estimation of objective and constraint is acted as an additional constraint of original optimization problem,resulting in a new robust optimization of an outer-inner optimization structure.The optimization results of shell transfer arm show that the proposed method is effective in solving complex engineering optimization problems with interval uncertainties.
ordnance science and technology;interval uncertainty;guaranteed cost optimization;shell transfer arm
TP 301;TP18
:A
1000-1093(2014)02-0152-06
10.3969/j.issn.1000-1093.2014.02.002
2013-04-19
国家基础科研计划项目(A2620110003)
石海军(1986—),男,博士研究生。E-mail:opt_bingo@163.com;钱林方(1961—),男,教授,博士生导师。E-mail:lfqian@vip.163.com
猜你喜欢
沈阳理工大学学报(2022年3期)2022-08-11
鞍钢技术(2022年3期)2022-06-12
中国金属通报(2021年17期)2021-12-23
中南大学学报(自然科学版)(2020年6期)2020-07-16
科技创新与品牌(2017年9期)2017-10-20
小学阅读指南·低年级版(2017年1期)2017-03-13
人生十六七(2015年6期)2015-02-28
专用汽车(2014年1期)2014-12-10
中国新技术新产品(2014年21期)2014-03-28
筑路机械与施工机械化(2014年2期)2014-03-01
