
控制力矩陀螺磁轴承¯框架动力学耦合特性仿真研究
2014-06-24 14:36张立,刘昆
载人航天 2014年1期
张 立,刘 昆
(国防科学技术大学航天科学与工程学院空间技术研究所,长沙410073)
·工程技术·
控制力矩陀螺磁轴承¯框架动力学耦合特性仿真研究
张 立,刘 昆
(国防科学技术大学航天科学与工程学院空间技术研究所,长沙410073)
框架角速率精度决定着控制力矩陀螺输出的姿态控制力矩精度,前者的精度由框架伺服电机力矩精度和框架转动惯量决定。磁悬浮控制力矩陀螺框架转动和陀螺转子的微小扭摆运动间存在动力学耦合,其框架表现出比标称值大的等效转动惯量。在柔性结构框架动力学模型和磁轴承刚度¯阻尼模型基础上,研究磁轴承¯框架动力学特性,推导出框架等效转动惯量和磁轴承控制参数之间的关系式,表明调整磁轴承控制参数能增大框架等效转动惯量,提高框架角速率精度。根据闭环系统稳定性和轴承承载力,确定了磁轴承控制参数取值范围,并给出了框架等效转动惯量的调节范围。通过对某小型磁悬浮控制力矩陀螺框架角速率控制系统的Simulink仿真,证明了控制力矩精度可以提高5倍,验证了模型的准确性。
控制力矩陀螺;磁轴承;动力学耦合;指向精度
1 引言
2003年美国提出“太空快速响应计划”后,有效载荷的快速发射、机动、服务和回收受到前所未有的重视,小卫星技术成为研究热点[1⁃3]。近年来,高精度空间监测、卫星监视等越来越多的航天任务需要具有高姿态机动能力和高指向精度的小卫星。国际上把姿态机动角速率范围是1~10°/s的小卫星称作敏捷小卫星[4,5]。
敏捷小卫星姿态控制系统(ACS)要能够提供大的控制力矩并且要适应大的力矩变化范围。相对于飞轮执行机构,控制力矩陀螺(Control Mo⁃ment Gyroscope,CMG)具有力矩放大效应,从框架输入很小的力矩就可以通过转子角动量方向的改变输出较大的姿态控制力矩[6],因此小型CMG是敏捷小卫星姿态控制执行机构的首选[7⁃9]。例如英国灾害监测商业小卫星BILSAT⁃1上采用了两只质量小于1.5 kg的小型CMG,使该星的姿态机动能力达到了2°/s[7]。
磁悬浮控制力矩陀螺(Magnetically Suspended CMG,MSCMG)振动噪声低,回转精度高,与机械轴承相比转子转速可以大幅度提高,单位体积输出的姿态控制力矩更大,已成为CMG的重要发展方向[10]。
影响姿态控制力矩精度的框架角速率精度由框架伺服电机输出的驱动力矩精度和框架转动惯量决定。电机的力矩精度与最大输出力矩成反比。航天器的机动性和指向精度要求难以兼顾。采用相同精度的力矩电机,框架转动惯量越大,框架角速率精度越高[6]。小型CMG框架转动惯量受限,框架角速率精度成为决定姿态控制精度的主要因素[7]。
采用磁轴承支承高速转子大幅度提高转子转速是增大CMG单位体积输出的姿态控制力矩最为有效的途径[6]。磁轴承消除了摩擦、寿命长,支承刚度和阻尼可控,可以进行主动振动控制降低噪声、提高回转精度,磁悬浮控制力矩陀螺(Magnetically Suspended CMG,MSCMG)成为CMG的重要发展方向[9]。
文献[11]指出内部采用柔性装配方式的框架结构所表现出的视在转动惯量比其实际标称转动惯量大。法国阿尔卡特空间技术公司对其MSCMG产品Mini⁃CMG进行的实验研究表明调低磁轴承支承角刚度能增大框架等效转动惯量,从而最终将卫星的姿态稳定度提高5倍[12]。
本文首先建立单框架MSCMG框架角速率控制系统模型,研究含结构柔性的框架的动力学特性,之后给出四自由度陀螺转子磁轴承控制系统模型,研究稳定前提下磁轴承刚度可调节的范围,推导MSCMG磁轴承支承刚度与姿态控制力矩精度间的关系,以及磁轴承控制参数的调节范围,最后通过仿真进行验证。
2 MSCMG框架角速率控制系统模型
MSCMG的原理如图1所示,陀螺转子角动·量为H,某时刻H的方向沿x轴,框架角速率为θG,框架角动量方向沿y轴,则输出的姿态控制力矩大小为Toutput=H··θG,方向沿z轴[13]。陀螺转子和框架间采用磁轴承支承,转子与框架无接触,且可以在一定间隙范围内发生相对位移,并表现出一定的刚度和阻尼特性。

图1 MSCMG原理图Fig.1 Schematic diagram of MSCMG
框架角速率控制系统原理如图2所示[13]。其中θ·C为根据姿态控制律解算出的框架角速率指令信号,θ·G,θ·TT分别为框架的实际角速率和速率传感器敏感的角速率,这两个信号之间有一定的误差。力矩电流环作用是使无刷直流电机输出的框架驱动力矩TM跟踪指令转矩TMC。TD是扰动力矩,包括电机力矩误差和航天器通过CMG支座耦合到框架上的干扰力矩。

图2 MSCMG框架角速率控制系统结构图Fig.2 Gimbalrate control system block diagram of MSCMG
MSCMG的框架动力学频域模型如图3所示[13],由于陀螺效应,框架角速率会导致输出轴方向的陀螺力矩TO=θ·GH,这是期望的CMG有效输出力矩。在输出轴方向上,作用在转子上的净力矩为陀螺力矩TO减去轴承约束力矩KOθO+DOθ·O。KO,DO分别为磁轴承的扭摆角刚度和角阻尼系数,其表达式推导见第2节。转子在输出轴方向上的角速率由于陀螺效应会产生电机轴上的陀螺效应反馈力矩TG,该力矩的作用方向与电机力矩相反。作用在框架上的净力矩为电机力矩TM减去陀螺效应反馈力矩TG。

图3 MSCMG框架动力学频域模型Fig.3 Block diagram in frequency domain ofMSCMG gimbal dynamics
MSCMG磁轴承扭摆角刚度、角阻尼系数与框架等效转动惯量的关系推导如下:框架等效转动惯量IGE按(1)式定义[12],根据梅逊增益公式[14]得(2)式。

在低频假设下(频率远小于1 rad/s),有:

(4)式即为低频假设下估算MSCMG框架等效转动惯量的公式。从中可以看出磁轴承刚度系数越低,框架等效转动惯量越大,并且当陀螺转子角动量越大时这种效应越明显。
3 MSCMG磁轴承角刚度¯角阻尼特性分析
假设转子为匀质对称转子,则四自由度磁轴承转子径向转动运动的动力学频域模型如公式(5)(6)所示[15]。
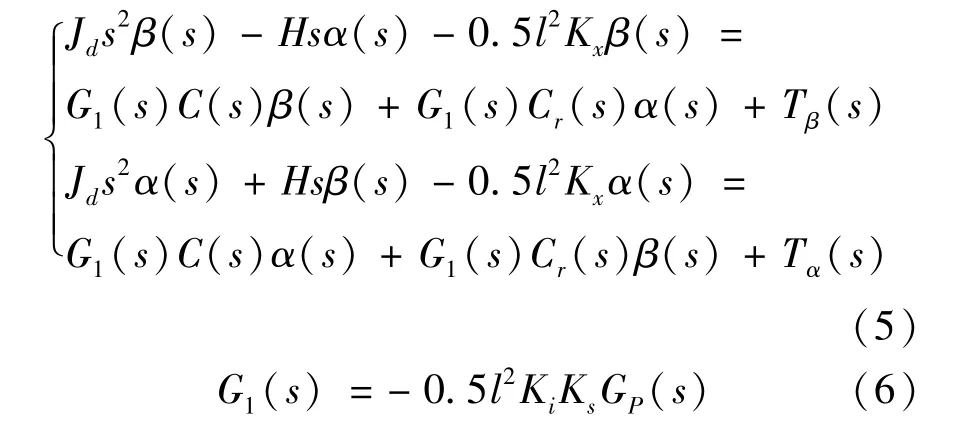
其中β(s)和α(s)为转子径向相对定子的两自由度的角位移,Tβ(s)和Tα(s)为作用在转子径向的外力矩。(5)式两个等式右边第一项为磁轴承四轴平动控制器C(s)=kc+kds产生的轴承恢复力矩,第二项为磁轴承交叉反馈控制器Cr(s)=kcr+kdrs产生的轴承恢复力矩。l为陀螺转子两个径向磁轴承磁极面的轴向中心距,Jd为转子赤道转动惯量,Ki和Kx为磁轴承电流刚度和位移刚度,Ks为磁轴承位移传感器灵敏度,GP(s)为磁轴承功放传递函数[15],函数形式如式(7)。

将频域动力学方程组(5)的第一个等式乘以虚数单位j加到第二个等式得到式(8)所示复系数频域方程:

其中轴承负荷角位移θ(s)和复合外力矩T(s)的定义如式(9)(10)所示。
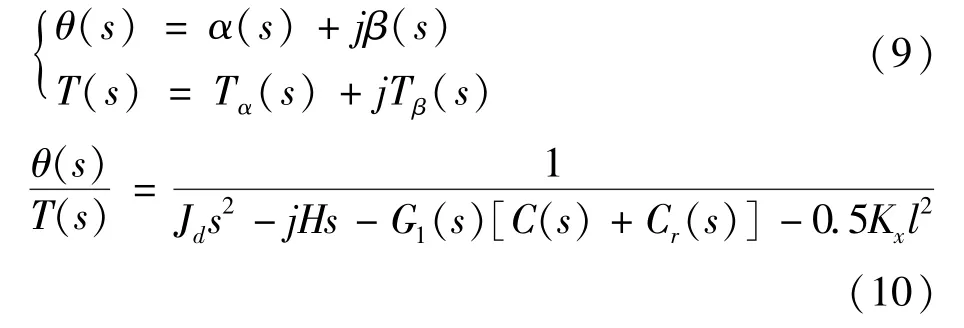
根据(10)式并令s=jω,定义磁轴承角刚度KO如式(11)。在低频假设下,KO简化为式(12)。


将(12)式代入(4)式得到MSCMG框架等效转动惯量与磁轴承控制参数的关系如式(13)。

为了确定IGE的调节范围,研究稳定前提下控制参数kc,kd的取值范围。以外力矩为输入,以轴承角位移为输出的闭环传递函数Gcl(s)如式(14)所示[15]。

Gcl(s)含有两个实系数传递函数,它们的特征多项式均为Δ,如(15)式所示。Gcl(s)稳定等价于这两个实系数传递函数都稳定,即Δ=0的根都具有负实部。

其中各系数计算公式见式(16)。

将文献[12]中mini⁃CMG的参数代入(15)式,并忽略其中系数小于0.0001的项,利用Routh⁃Hurwitz判据[14]得到控制参数的取值范围如(17)式。

为了避免陀螺转子与框架之间发生碰撞,磁轴承产生的最大恢复力矩Tmb还必须大于MSC⁃MG输出最大力矩时转子所承受的陀螺力矩Tomax,后者如(18)式所示。xm为磁轴承转子径向最大位移,即转子平衡位置和保护轴承之间的径向距离。

根据(12)式和(18)式,可得(19)式。

从而最终得到MSCMG磁轴承控制参数kc,kd取值范围如(20)式所示。

4 框架⁃磁轴承动力学耦合特性仿真研究
将图3中的框架输出轴角刚度⁃角阻尼模型替换为四自由度磁轴承转子径向转动动力学频域模型,得到框架⁃磁轴承动力学耦合频域模型如图4所示,其中模块AMB代表磁轴承子系统。
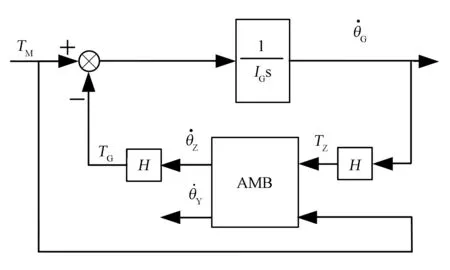
图4 MSCMG框架⁃磁轴承动力学耦合频域模型Fig.4 Block diagram in frequency domain of MSC⁃MG gimbal-bearing dynamic coupling
根据图2和图4建立Simulink模型,研究磁轴承控制参数选择对框架角速率控制精度的影响。力矩电流环传递函数设为增益为1的一阶惯性环节,其传递函数GGP取为(21)式。角速率控制器GGC取为(22)式。

框架和磁轴承仿真参数按文献[12]中的mini⁃CMG性能指标设定。框架扰动力矩TD用白噪声模拟,噪声幅值水平参考文献[12]中的电机力矩精度设定。
磁轴承四轴分散平动控制器C(s)采用不完全微分控制,交叉反馈控制器Cr(s)用正的比例反馈抑制章动,用负的微分反馈抑制进动,控制器算法如式(23)所示。

仿真中kd和kdr固定为0.028和¯6,只研究kc和kcr的变化对框架角速率控制系统的影响。记kc=kc+kcr,图5给出了不同的kc值对应的框架角速率阶跃响应,阶跃信号幅值为0.2 rad/s。

图5 不同kc对应的MSCMG框架角速率阶跃响应Fig.5 Step response of MSCMG gimbal-rate control system under different kc
从图5可以看出kc取3,6,15时框架角速率的上升至稳态值所用的时间分别0.14 s,0.19 s,0.33 s,从中体现出的框架等效转动惯量约为1∶1.36∶2.4,与(13)式吻合的很好。
为了考察框架等效转动惯量的可调范围,给出稳定前提下kc可取的极限值所对应的框架角速率的稳态误差,如图6所示。

图6 不同kc下MSCMG框架角速率稳态误差Fig.6 Static tracking errors of MSCMG gimbalrate control system under different kc
从图6中可以发现,kc取2.8时,框架角速率精度约为1.3×10¯4rad/s,kc取90时,框架角速率精度约为2.5×10¯5rad/s,提高了约5倍,与文献[12]的实验结果吻合。
[1] Lappas V J.A control moment gyro based attitude control system for agile small satellites[D].University of Surrey,UK,2002,37⁃89.
[2] Christopher JH,David B.Precision Pointing control of Agile Spacecraft Using Single Gimbal Control Moment Gyroscopes[R].AIAA⁃97⁃3757,1997.
[3] BongW,David B.Rapid multi⁃target acquisition and point⁃ing control of agile spacecraft[R].AIAA⁃2000⁃4546,2000.
[4] Lappas V J,Steyn W H,Underwood C I.Practical results on the development of a control moment gyro based attitude control system for agile small satellites[J].The sixteenth Annual AIAA⁃PUSU Conference on Small Satellites.Utah:AIAA. 2002.12⁃15.
[5] Reimer Berner.Control moment gyro actuator for small satellite applications[D].University of Stellenbosch,South Africa,April 2005:10⁃28.
[6] Lappas V J,Sten W H,Undewood C I.Torque amplification of control moment gyros[J].Electronics Lett.,2002,38(15):837⁃839.
[7] Lappas V J,Steyn W H,Underwood C I.Experimental testing of a CMG cluster for agile microsatellites[C].11th Mediterranean Conference on Control and Automation,Turkey,2003:1⁃6.
[8] 刘军,韩潮.应用变速控制力矩陀螺的微小卫星大角度姿态机动控制[J].空间科学学报,2007,27(4):336⁃342.
[9] 谷松,贾继强,金光.快速机动小卫星执行机构研究[J].光学精密工程,2008,16(8):1540⁃1545.
[10] Fausz J,Wilson B,Hall C,et al.Survey of technology developments in flywheel attitude control and energy storage systems[J].Journal of guidance,control,and dynamics,2009,32(2):354⁃365.
[11] Jacques B,Michel L,Xavier R.High precision mini-CMG's and their spacecraft applications[R].AAS⁃98⁃006,1998:92⁃107.
[12] Roser X,Sghedoni M.Control moment gyroscopes and their application in future scientific missions[C]//5th International Symposium on Test and Measurement,2003,5:523⁃528.
[13] 房建成.单框架控制力矩陀螺方案论证与太阳帆板平面度测量系统研制[R].北京航空航天大学博士后出站报告,1999:1⁃80.
[14] 吉明,姚绪良.鲁棒控制系统[M].哈尔滨:哈尔滨工业大学出版社,2002:20⁃45.
[15] 吴刚.混合磁轴承飞轮系统设计与控制方法研究[D].长沙:国防科技大学,2006:45⁃65.
Simulation Study on Dynamic Coupling Characteristics between the Gimbals and Magnetic Bearings of CMG
ZHANG Li,LIU Kun
(Institute of Space Technology,College of Aerospace Science and Engineering,National University of Defense Technology,Changsha 410073,China)
The accuracy of gimbal-rate determines the precision of the output attitude control torque of a control moment gyroscope(CMG).The former is determined by the torque precision of the gimbal servomotor together with the moment of inertia of the gimbals.Because of the dynamic coupling between the gimbal rotation and the rotor radial rotation of the magnetic bearing,magnetically suspended CMG demonstrates larger apparent gimbal inertia than its mechanical inertia,thus achieve higher gimbal rate accuracy and high pointing precision.Based on the gimbal control⁃loop dynamics with compliant structures and the stiffness⁃damping model of the magnetic bearing(MB)control⁃loop,the gimbal⁃MB coupling model was built.The relationship between the equivalent gimbal inertia and the MB′s control parameters and the adjustable range of the gimbal inertia was presented. Simulation results on a small MSCMG gimbal control⁃loop showed that the relationship presented was accurate and the output torque precision could be improved by 5 times.
control moment gyroscope;magnetic bearing;dynamic coupling;pointing accuracy
V448.25
A
1674⁃5825(2014)01⁃0069⁃05
2013⁃08⁃08;
2013⁃12⁃29
国家自然科学基金(61304036)
张立(1986⁃),男,博士,讲师,研究方向为磁轴承控制技术、嵌入式控制系统设计实现与仿真。E⁃mail:zhangkaiyue2004@aliyun.com
猜你喜欢
山西大同大学学报(自然科学版)(2022年4期)2022-08-29
辽宁丝绸(2021年2期)2021-12-23
防爆电机(2021年3期)2021-07-21
小学生学习指导(低年级)(2019年10期)2019-10-16
物理与工程(2019年2期)2019-07-09
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
