
交会对接任务两目标协同控制技术研究
2014-06-24 14:36邹雪梅陈险峰邢锦江赵焕洲
载人航天 2014年1期
邹雪梅,陈险峰,邢锦江,刘 勇,赵焕洲
(北京航天飞行控制中心,北京100094)
交会对接任务两目标协同控制技术研究
邹雪梅,陈险峰,邢锦江,刘 勇,赵焕洲
(北京航天飞行控制中心,北京100094)
在载人航天工程交会对接任务阶段,北京航天飞行控制中心首次实现了真正意义上的两目标协同控制,完成了协同体系构建、协同模式研究、协同技术攻关、协同方案设计、协同系统研制的完整技术演进过程。本文主要目标是对交会对接任务北京中心的两目标协同控制技术研究成果进行总结,主要涉及在交会对接任务协同控制技术体系构建、两目标关联计划工作模式、两目标注入安排协同设计与实施的经验与不足,通过对协同系统在交会对接任务中的实战应用情况,分析交会对接任务在协同自动化手段方面的成果和后续改进完善方向,为后续空间站任务设计和实现更复杂的多目标协同控制体系积累经验和教训。
载人航天工程;交会对接;协同;控制
1 引言
空间交会对接技术是当今航天领域最为复杂的技术之一,也是空间站建造必须突破的关键技术,交会对接地面飞行控制的重点和难点在于天地协同配合控制更加复杂:一是两目标高时效性精确协同控制比单目标控制更加复杂;二是航天员在轨重大任务天地协同更加复杂[1⁃3]。
国外交会对接地面飞行控制技术经过四十余载发展、数百次交会对接任务实践,已经形成了适应国际空间站多国合作、长期运营管理的分布式协同控制体系,以及分层任务规划、航天器故障诊断与健康管理等飞行控制技术。
本文立足于北京航天飞控中心交会对接飞控实践,总结了交会对接飞行控制系列关键技术,文章从空间两目标强约束情况下协同飞控体系建立,独立控制、分层协同的协同飞控模式设计出发,介绍了基于动态组装、应急重构的两目标关联规划技术;基于状态的两目标协同上行控制及数据注入动态规划技术;以及基于专家规则生成、基于实时状态流更新的协同工作程序生成、更新技术。最后根据三次交会对接任务实际应用情况,指出了不足及后续改进完善方向[4]。
2 协同飞控体系及模式设计
2.1 协同飞控体系
协同飞控技术体系按层次化的结构设计,共包括天地基测控资源综合配置(Integrated Tracking Resource Configuration Layer)、跨平台飞控数据综合处理(Integrated Data Processing Layer)、两目标关联飞行控制(Coorunated Mission Control Layer)、两目标飞行控制协同实施(Coodinated Operation Collaborating Layer)四个层次[5,6]。
层次化的飞控体系在不同的飞控平台之间进行数据交互处理,对不同的目标建立关联控制机制。既能够为单任务单目标提供独立飞控支持,又满足多任务多目标的协同飞控需要。
2.2 协同飞控模式设计
交会对接协同飞控模式以单目标控制作为基础,在多目标并行控制的情况下,从任务规划、测控资源、上行控制、数据处理、状态判断、在轨关键控制六个方面分别研究协同控制机制。
在任务实施过程中,根据协同飞控机制,飞行控制既能够保持相对独立、密切配合,又保证决策指挥集中统一,各系统各岗位间监视、判断、报告、处置快速高效。

图1 协同工作体系图Fig.1 Structure of coordination operation
3 协同飞控技术研究
3.1 两目标关联规划技术
3.1.1 两目标关联计划工作模式
两目标关联计划工作模式的基本原则是两目标计划统一设计、统一生成、分类输出、独立实施。
在交会对接过程中,载人飞船与目标飞行器之间存在着状态相关和时序相关的关联控制,我们将两目标的飞行程序分解为彼此独立的飞控过程,每一个飞控过程由两目标具体的程控指令、GNC指令、遥控指令、航天员手控指令和航天员关键平台操作构成,在统一的时间轴上,面向飞控过程,利用自身的约束条件,也可利用对方的约束条件,合理安排各个飞控过程,给出其实施的约束条件和关联关系,形成两目标统一标称计划[7,8]。
任务实施过程中,根据两目标统一标称计划,结合轨道预报、控制参数、测控网配置等,统一生成两目标计划,得到两目标各类指令序列和操作序列,按照目标属性分类输出后,由两个飞控系统分别面向各自的目标进行实时控制。
这种设计方式确保了各类指令之间、指令与航天员操作之间、两目标之间控制动作和状态的协调和匹配,有利于计划冲突的发现与消解,解决了不同发射窗口使用共同的标称计划问题,解决了以往任务中“标称计划海洋”问题,有效提高了任务准备和实施的效率和可靠性。
3.1.2 两目标计划动态组装技术
按照两目标飞控实施的需求将交会对接任务过程按照任务阶段(Phase Layer)、控制过程(Process Layer)、指令模块(Module Layer)、单指令(Dictate Layer)逐层分解,面向飞控阶段和控制过程设计若干标称计划模块和指令模块,任务实施过程中根据实际的需求进行动态组装,实现了正常和应急交会对接和撤离两目标测控计划面向任务实时状态的快速设计与实施,实现了各天返回主副场、紧急返回和手控半自动返回测控计划的标准化设计与实施,在确保可靠性的前提下提升了面向复杂飞控过程计划设计与实施的灵活性。
3.1.3 两目标计划应急在轨重构技术
针对远距离导引轨控应急、推迟对接、推迟撤离、手控对接、手控撤离、在轨试验调整等各类型的应急控制分支,设计了基于飞控状态判断的应急测控计划分支。
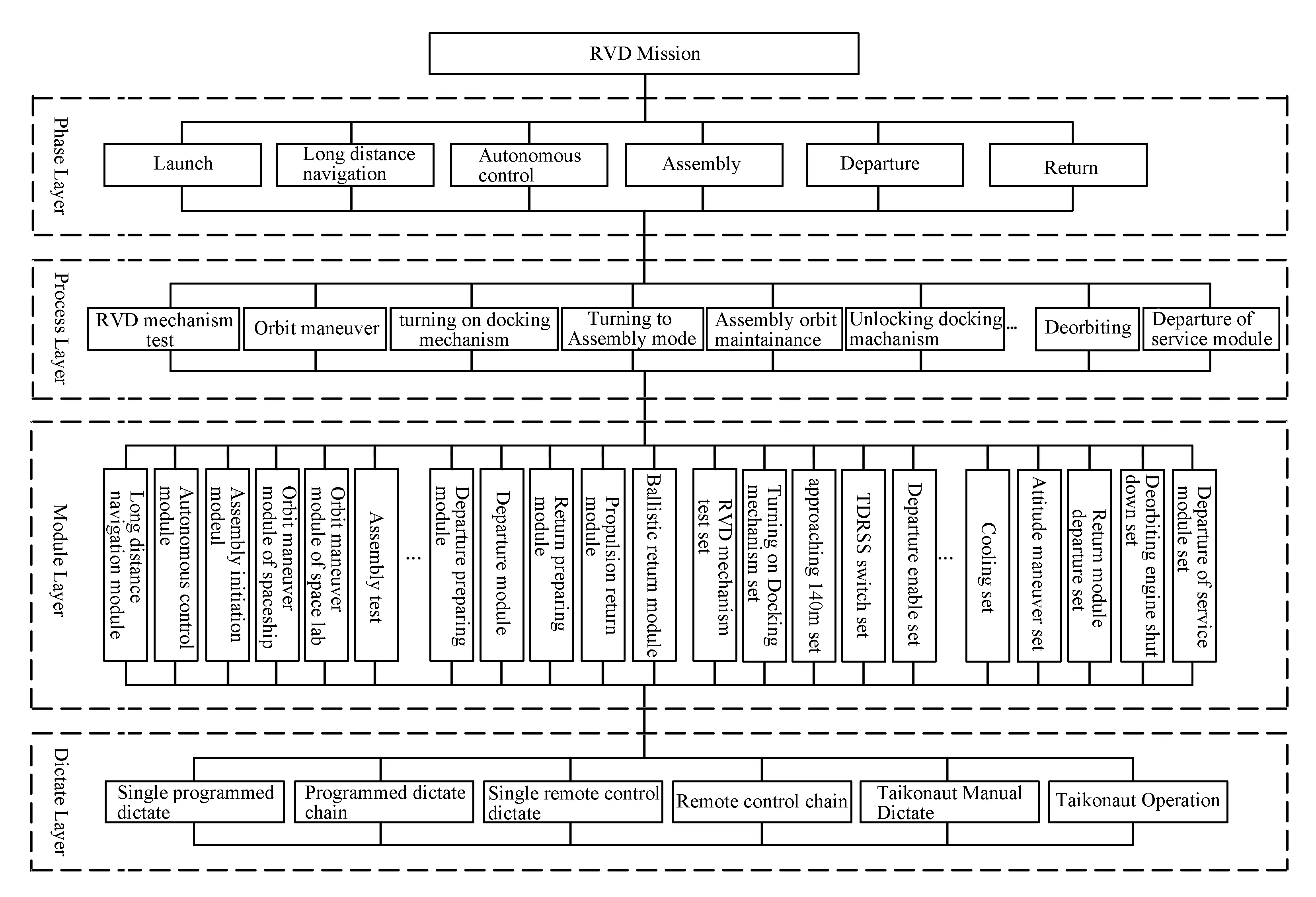
图2 计划动态组装示意图Fig.2 Dynamic assemble of mission planning
针对自主控制段5 km、400 m和140 m停泊点保持时间累计延长不超过5分40秒,仍在当圈对接的需求,设计了基于实时状态调整当前计划的策略,实现了根据实时状态调整当前控制指令序列,并解决了动态的对接指令序列与静态的入出测控区指令序列的冲突问题,能够在12分钟以内完成状态判断、计划调整、注入数据生成、确认与实施,确保飞船在当圈完成对接。
通过在任务实施过程中快速引入应急分支和实时调整策略,构建了满足应急状态的两目标测控计划,实现了两目标计划应急在轨快速重构。3.1.4 两目标测控资源综合规划技术
根据两个目标对测控资源的需求,按照控制目标分阶段综合配置测控资源的使用计划和模式(单目标跟踪、分时跟踪、分别跟踪、双目标跟踪),在优先使用默认的资源配置的基础上,根据跟踪弧段的实际分布和飞控需求变化动态配置各个目标的测控资源。
根据两目标在入出地基测控区、中继测控区和天地联合测控区时不同的控制需求,整合零散的地基和天基测控弧段,综合规划跟踪弧段,实现了天地基测控资源的一体化使用,在确保两个目标配置可靠的测控资源使用的前提下,最大程度的优化测控资源使用效率。
由于两目标在任务各阶段有着不同的测控网配置,且难以保障全网参与任务,测控资源配置存在不确定性。为确保地基测控网上行控制弧段的连续性,最大程度的优化地基测控资源,实现了测控点频动态调整技术,在优先使用测控总体规定的点频基础上,任务中可根据跟踪弧段的实际分布动态调整各测控站的点频。
3.2 两目标同步关联上行控制技术
3.2.1 数据注入动态规划技术
远距离导引段飞船每隔3到5圈进行一次控制,为确保轨道精度,每次控制后都必须进行2圈左右的测轨,留给地面轨道确定、控制参数计算与复核比对、飞控计划和注入数据生成会签及注入实施的时间极其有限。同时,这个时段围绕轨道控制还存在108种应急控制分支,每种应急分支中轨道控制的频度与正常相同。针对这些需求,我们通过两种方式来解决。
(1)注入数据动态规划
围绕远距离导引段以轨道控制为核心的控制需求,设计了注入数据的动态规划算法,对飞行程序注入内容覆盖区间、注入弧段选择、注入实施周期、注入支持资源的规划设计规则和调整策略进行量化描述,通过该算法对两个目标的数据注入进行动态的规划和设计,同时在任务实施过程中根据实际需求变化进行统一的优化和调整,实现了注入实施所需的定轨资源和注入资源的同步和最优使用,解决了远距离导引段高频度轨道控制情况下两类资源高度竞争的工程难题。
(2)应急注入规则化技术
在注入数据动态规划算法的基础上,研究这种将工程任务定量化、规则化描述和实施的技术进行扩展和提升,使其能够在任务全程特别是在复杂的应急分之情况下实现应用,即:将交会对接任务全程的应急控制分支按照其注入需求进行分类,按照各分支类型注入需求和测控支持条件分析、提炼注入实施规则,实现了使用简单规则对复杂应急分支中注入数据需求和实施要求的完整描述。在覆盖各分支注入需求和实施要求的基础上,分析各个应急分支间的嵌套和交叉覆盖逻辑关系,设计适用多个应急分支子阶段的子规则进行复用,使注入规则在保证适用性的前提下最大限度的提高灵活性,任务中根据实际情况进行动态调整。
3.2.2 基于状态的两目标协同上行控制
飞船自主控制段,地面需在极短的时间内准确判断飞船和目标飞行器当前状态,并实施遥控发令。140米接近过程中,当两飞行器质心相对距离在280~260 m时,须先判发天宫TK41(目标空空通信切换小功率)指令,后向飞船发送K353(空空通信机切小功率)指令。
为此,我们将实时状态信息引入到上行控制中来,形成一个完整的状态反馈控制系统。通过在两个目标上行控制平台间建立上行控制信息流和控制流协同机制(Upward Control Coordinating)(信息流(Coordination Information)完成上行控制的前提条件和执行效果判断,控制流决定控制走向,信息流和控制流可由软件自动和人为干预两种方式进行调整),实现基于状态的两目标协同上行控制[8]。
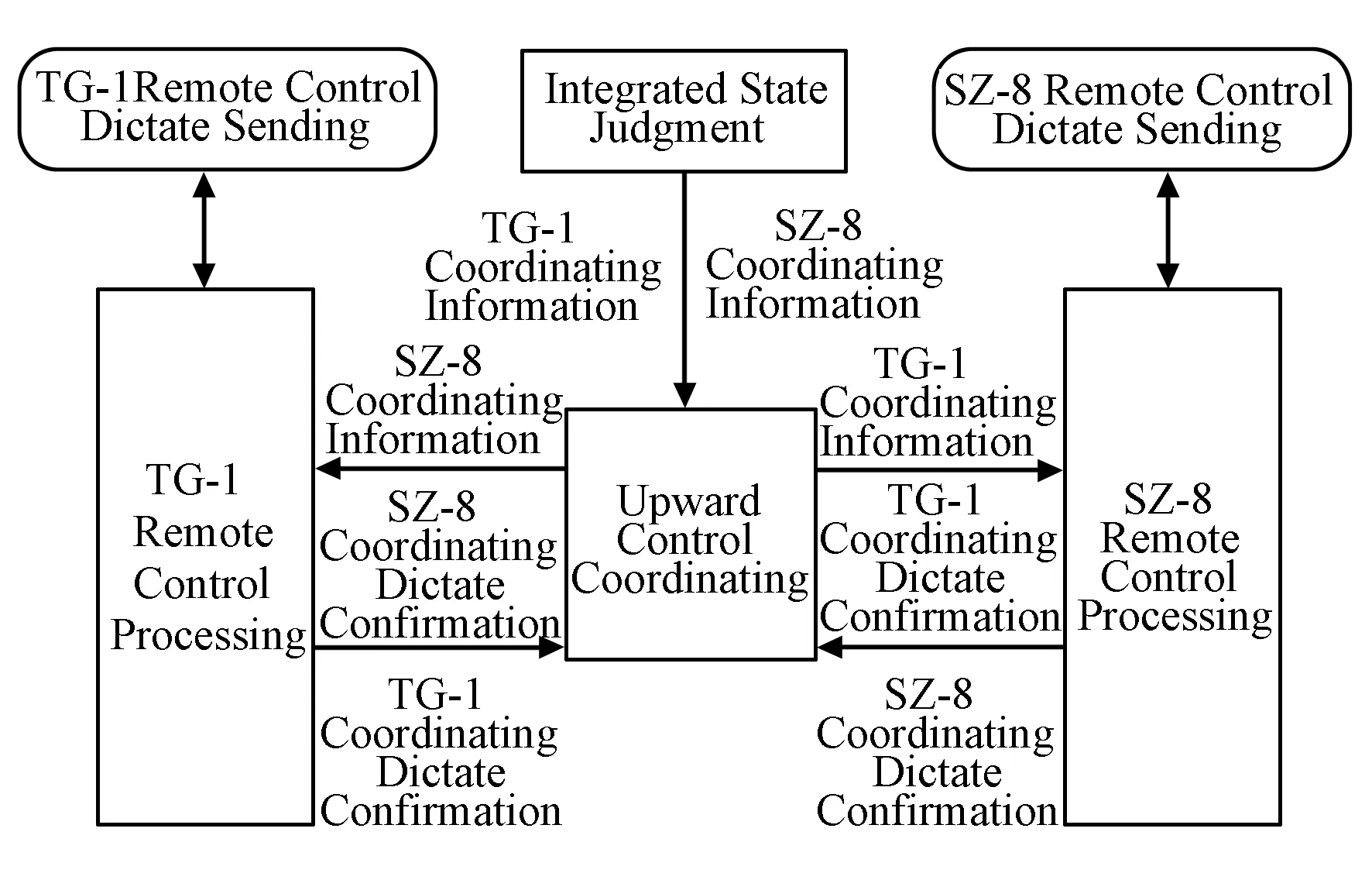
图3 基于状态的两目标协同上行控制示意图Fig.3 State⁃based coordination control of two spacecraft
3.3 两目标状态综合监测与故障诊断
3.3.1 两目标多源遥测数据实时综合选优
基于对测控网跟踪计划的获取和识别,同时引入部分成熟的经验规律,对两目标的多源遥测数据进行综合选优处理,有效避免了实时任务中进出站、过顶等情况下遥测跳变对状态监视的影响。通过大量遥测数据的时延分析和精确的抖动补偿模型设计,解决了延时或事后数据综合选优过程中数据时序的精确匹配难题[9]。
3.3.2 关联故障联合诊断与同步处置
对于涉及飞船和目标飞行器两个目标状态和处置需求的关联故障模式,对此类关联故障设计了“联合诊断、同步处置”的飞控模式,即分别在两个目标故障诊断平台上引入两目标实时状态信息进行诊断,按照事先确定的协同关系进行同步的故障处置,使关联故障的诊断和处置流程在规避冲突的前提下达到效率最优。
3.4 两目标动态协同工作程序技术
3.4.1 基于专家规则的协同程序生成技术
交会对接任务中,我们实现了两目标动态协同程序设计,用以指导控制中心、调度指挥、飞控专家、载荷专家以及航天员、飞船以及测控站(船)乃至测控网的协同工作关系。
由专家制定规则,形成协同工作规划所需的规则库(Specialist Rule Library)。其中,每条规则都带有一组可填参数。规则的一些参数指定了“可能发生什么”,而另一些参数指定了“如何处理”。
依据这些参数来定义飞控协同策略,通过输入飞控模式状态和任务状态信息(Actual Mission States),协同自动化系统服务器(Collaborating Procedure Server)计算并更新协同程序事件序列,实现了基于专家规则的协同程序的快速生成和快速更新(Releasing)。
3.4.2 基于状态流的协同程序实时更新技术
根据对时间的敏感性的不同,可将任务的状态转移分为静态和动态两种形式。
按照离散马尔科夫模型,静态形式有局限性,它难以描述更复杂的任务状态和关联关系,特别是关于时间连续变化的任务状态变量(如轨道参数),因其假定主要特征不随时间变化,不适合状态随时间连续变化的航天任务。因此,我们制定了动态的状态转移形式。
同静态形式相比,状态流中状态变量的连续变化会引发显著的特征变化,并进而导致飞控指令随其变化。同样,任务状态与飞控活动共同决定了各转移发生的概率,首要的飞控目标是最优终态F的达成。动态形式可比静态形式涵盖更为广泛和复杂的任务状态,适用于更复杂的任务,如短期载人飞行以及交会对接等。动态形式强调了时间相关变量所可能导致的任务状态变化,它继承于离散马尔科夫模型,是静态形式的推广。
基于状态流制定两目标协同策略,引入两目标程控指令计划、遥控指令计划、航天员手控指令计划、测控条件以及故障模式等,作为协同程序设计的基本要素,以这些基础要素为核心设计约束在其上的流程化协同操作内容。
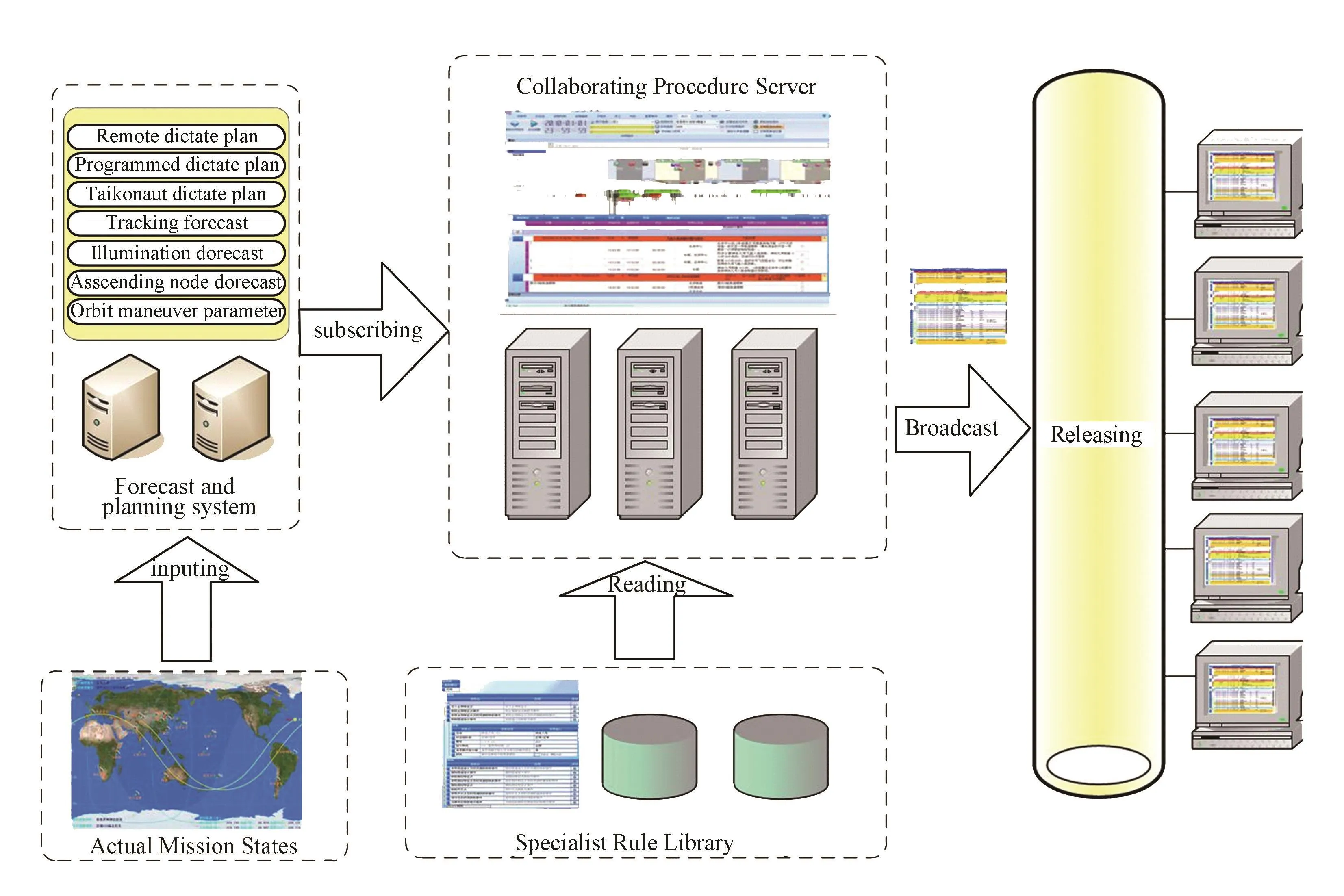
图4 协同自动化生成示意图Fig.4 State⁃based coordination control of two spacecraft
3.4.3 基于专业支持模式的手控对接天地协同机制
在航天员手控对接、手控撤离的操作控制过程中,航天员需发送近40条手控指令,地面需对20个关键状态进行确认,对接实施过程中关键节点的评估放行、对航天员的专业支持以及故障情况下的应急处置,都需要航天员、飞船和地面飞控等多个系统密切协同配合,协同匹配的时间精度要求在10秒量级。
设计了“集中指挥、会商决策、分布支持”的手控对接专业支持模式,在此基础之上,结合测控条件和确认时间等多种因素设置多个关键确认点,按照确认点时间约束的方式设计协同程序关键事件、确认节点和协同流程,实现了基于两目标状态的手控对接天地协同实施。
4 应用情况及不足
前述协同飞控体系、协同飞控模式及协同飞控技术在神舟八号、神舟九号、神舟十号与天宫一号交会对接任务准备及任务实施过程中得到了充分应用,很好的解决了两目标强约束下协同飞行控制问题,确保了两目标及天地复杂协同的精准实施。
随着任务周期增长,尤其是空间站任务长期运营管理,现有的任务规划人工设计工作量大、故障诊断缺乏飞行器全面健康状态管理等矛盾将会凸显。后续需要在基于规则和状态的任务规划技术、结合了在轨维修、健康管理的故障诊断技术方面进行进一步深入研究[10,11]。
5 结论
1)采用两目标相对独立控制下的协同飞控模式,有力保障了任务实施与任务准备并行情况下,天宫一号飞行控制、飞船飞控平台的适应性改造、各阶段联调联试的正常实施。
2)两目标关联任务规划采用“统一规划,独立实施”的工作模式,支持飞行计划功能模块在轨动态组装及飞行程序指令级的在轨应急重构,确保了两目标控制的协调性,并具有较强的应急能力。
3)同步关联上行控制技术、状态综合检测与故障诊断技术满足了高时效性要求下两目标同步上行控制、综合状态监测的要求。
4)协同自动化方面采用基于专家规则生成及基于任务状态流更新的技术,减少了70%协同程序人工编排工作量,并实现了实时更新、决策支持。
[1] 唐国金,王华,罗亚中,等.空间交会对接的发展现状及关键技术[C]//2006年国防科技前沿发展论坛.2006.
[2] 张渊.载人飞船飞行控制技术[M].北京:国防工业出版社,2008.
[3] 朱仁璋.航天器交会对接技术[M].北京:国防工业出版社,2007.
[4] Fehse W.Automated Rendezvous and Docking of Spacecrft[M].London:Cambridge University Press,2003.
[5] NASA.International Space Station Concept of Operational and Utilization[C]//SSP50011.Rev.B,International Space Station Program,NASA⁃JSC,Houston,1994.
[6] Anand D K.Introduction to control systems[M].Elsevier Science Inc.,1984.
[7] Issermann R.Digital Control systems[M].Springer⁃Verlag,Berlin,1981.
[8] CCSDS.Telecommand,summary of concept and rationale[S].Technical Report CCSDS 200.0⁃G⁃61987.
[9] CCSDS.Telemetry,summary of concept and rationale[S]. Technical Report CCSDS 100.0⁃G⁃11987.
[10] Fehse W,Ortega G.Operator monitoring and support system for rendezvous and docking[J].Paper ID:2a004,SpaceOps98:Proceeding,Fifth International Symposium on Space Mission Operations and Ground Data Systems,1998.
[11] Kaplan M.Modern spacecraft dynamics and control[M].Wiley and Sons,New York,1976.
Study on Coordination Control Technology in Rendezvous and Docking of Two Spacecrafts
ZOU Xuemei1,CHEN Xianfeng1,XING Jinjiang1,LIU Yong1,ZHAO Huanzhou1
(1.Beijing Aerospace Control Center,Beijing 100094,China)
In the manned Rendezvous and Docking(RVD)mission,Beijing Aerospace Control Center realized coordination control for the first time and the technical evolution was accomplished,including coordination system constructing,mode research,key technology breakthrough,solution design and software and hardware development.This paper focused on the coordination control technology of RVD mission,and summarized the deficiency of coordination system,mission planning system and data upload solution.By reviewing back the implementation of the technology in three RVD missions,experience was accumulated and technical prospect was proposed,which was useful for China′s space station project.
manned space project;rendezvous and docking;coordination;control
V526;V556
A
1674⁃5825(2014)01⁃0026⁃06
2013⁃10⁃25;
2013⁃12⁃29
邹雪梅(1974⁃),女,硕士,高级工程师,研究方向为航天测控总体技术。E⁃mail:zouxuemei@org.bacc.cn
猜你喜欢
中国船检(2020年11期)2020-11-27
民用飞机设计与研究(2019年2期)2019-08-05
当代水产(2019年1期)2019-05-16
科技创新导报(2017年1期)2017-03-21
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
太空探索(2016年9期)2016-07-12
创业家(2015年1期)2015-02-27
