
飞船返回控制精度分析与应用
2014-06-24 14:36徐海涛谢剑锋刘成军盛庆轩
载人航天 2014年1期
徐海涛,谢剑锋,刘成军,盛庆轩
(北京航天飞行控制中心,北京100094)
飞船返回控制精度分析与应用
徐海涛,谢剑锋,刘成军,盛庆轩
(北京航天飞行控制中心,北京100094)
将飞船返回控制过程按不同阶段进行分解,分析返回各阶段的返回控制精度影响因素,并标定返回制动推力系数。根据返回控制精度分析结果,进行技术状态改进,在神舟十号返回任务成功验证了引入返回泄压模型进行轨道预报、采用返回制动推力系数标定结果计算返回控制参数,可以有效提高返回控制精度,对如何减小返回控制误差,在工程设计上具有借鉴作用。
返回控制;再入制导;泄压;制动推力系数;返回轨道设计
1 引言
载人飞船的返回控制是航天器飞行控制任务中重要的一项内容,为了保证飞船的安全返回,返回轨道设计采用的再入方式必须满足一定的过载、热流、落区等条件。
飞船返回一般采用弹道式、半弹道式或升力式再入,再入制导方式一般采用标称制导[1]和预测制导等[2]手段。对于工程技术而言,返回控制精度问题是后续深空探测关键技术[3]的基础,需要着重解决,无论是哪一种影响落点精度的因素被放大,都会对落点产生很大影响,甚至超出设计的可控范围。
美国阿波罗计划成功实现6次载人登月返回,返回舱以第二宇宙速度,采用预测制导和标称制导结合的弹道¯升力跳跃式再入方式返回。相关文献对此再入方式进行了重新设计[4],对月球返回再入弹道进行了多种分析和优化[5,6],并探讨了月球返回轨道的直接再入[7,8]和其他方式[9]的再入制导。这种再入方式的返回落点精度可以控制在几十公里的量级。
同时,美国和日本[10]等各国也在积极研究充气式再入飞行器技术[11],为将来开发火星探测器[12,13]收集数据。充气式再入飞行可以节约成本,满足航天器活动中快速返回、应急返回、机动返回的需求,但由于这种再入飞行器仍然是被动式再入与返回,弹道误差很大,一般在几十公里的量级。
我国在近地轨道返回领域中的返回控制技术已经相对成熟,正在向航天器深空探测[14]返回方向进行探索。现阶段载人飞船的返回再入方式为半弹道式,使用基准弹道法制导,已经过10次任务的检验。局限于我国海上搜救力量较为薄弱,飞船一般返回到陆上着陆场,由于地面条件较为复杂,因此对落点精度要求较为严格。
神舟七号任务结束后,考虑到地面测控需求以及气象条件的限制,返回轨道设计将制动位置从船站移到了陆地站进行测控,瞄准点不变,缩短了返回航程,因而整个返回轨道进行了重新设计。
从历次任务落点距离理论瞄准点的偏差结果看,神舟八号、九号飞船落点偏差较大,对任务造成了隐性的危胁,需要对产生落点偏差较大的原因展开相关分析工作,力求缩小落点偏差范围。
本文通过研究,确认了提高返回初值点精度和推力系数是地面控制中急需分析改进的问题,分析了轨道舱泄压对返回初值点精度的影响、推力系数对返回弹道精度的影响,提高了返回初值点的精度,得出了应使用实际推力大小计算返回控制参数的结论,二者得到了神舟十号飞船返回的应用验证,返回控制落点精度得到有效提高。
2 返回控制动力学方程
飞船返回轨道的基本运动方程建立在返回系中,在整个返回过程中,将地球考虑为均质旋转椭球。
建立质心动力学方程如式(1)所示,表述了在返回系中飞船加速度主要由视加速度W,重力加速度G,牵连加速度和科氏加速度组成,相关推导过程不再赘述,参考文献[15]中有详尽描述。
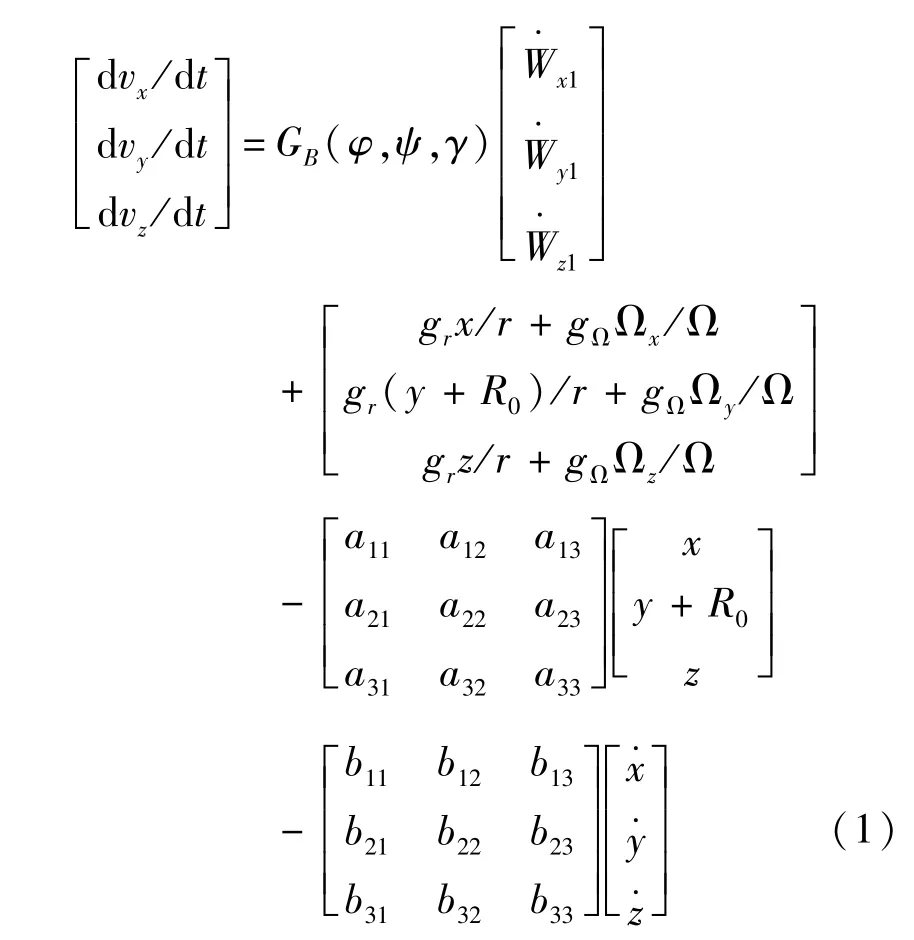
式中,视加速度项为:

其中,P为制动推力矢量,R为空气动力矢量,Fc为控制力矢量,为控制过程中需要重点分析的变量。
返回控制计算中考虑了六自由度模型,再入段采用基准弹道法进行制导。
3 计算分析
在工程实践中,确定误差源是减小返回控制误差的重要一环。飞船返回过程可分为制动段、过渡段、再入段、伞降段四个部分,提高返回控制精度可以分阶段把握,通过对各阶段影响弹道精度的因素进行分析,有针对性地消除每一阶段的误差因素,从而综合提高返回控制精度。
下面从影响返回控制精度的返回计算轨道初值、控制参数计算的推力大小两种因素进行分析,确定了误差产生的原因,给出了减小影响的方法。
3.1 返回初值分析
影响返回初值的主要因素是轨道舱泄压。飞船返回前,有一个泄压过程,飞船泄压过程对返回初值的主要影响在于返回控制动力学方程中公式(1)的初始条件。受飞行程序的约束,泄压前返回控制参数已经计算完毕并注入。由于神舟八号(SZ08)、九号(SZ09)任务还没有建立泄压影响模型,计算返回控制参数使用的轨道为泄压前轨道,与飞船运行到制动点的实际轨道有一定的差距。为了说明泄压前后返回初值的影响,分别采用理论轨道和实际轨道数据作为制动点初值,并用相同的控制参数进行仿真,外推轨道,进行泄压前后再入点差异的比较,比较结果见表1。
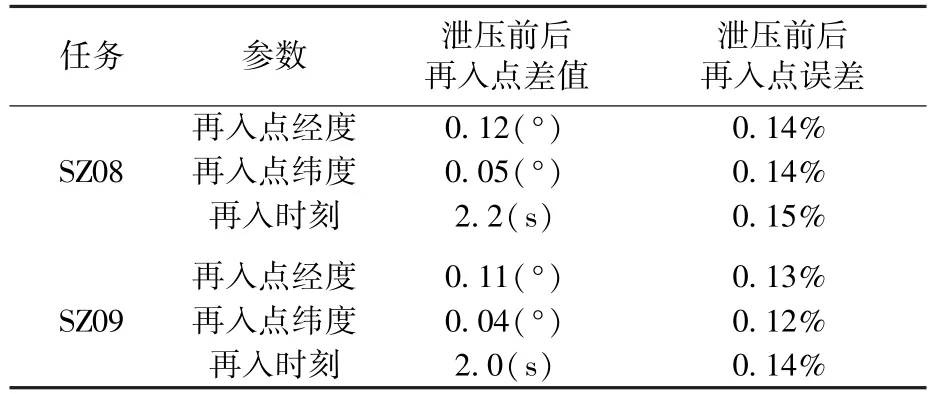
表1 泄压前后轨道计算的再入点结果Table 1 Reentry point fore⁃and⁃aft pressure leaking
从表1仿真结果来看,泄压对神舟八号、九号飞船返回轨道计算的影响为导致再入时刻误差2 s左右,对再入点位置也有一定影响。
泄压过程还会对控制参数计算带来影响,如果采用实际轨道数据作为制动点初值,并用泄压前后轨道计算的控制参数进行仿真,外推轨道,则得到如表2所示结果。

表2 泄压前后轨道计算的控制参数对比Table 2 Control parameter fore⁃and⁃aft pressure lea⁃king
从上表控制参数差值比对可以看出,速度增量误差量级在0.2 m/s左右,初值误差影响达到0.1%~0.2%,造成再入点位置误差0.1%~0.2%。
针对泄压给返回初值的轨道造成的误差,解决办法是,建立泄压模型后在轨道预报加入,并且使用泄压后的预报计算返回控制参数。
3.2 制动推力分析
制动推力系数对飞船返回过程的影响主要体现在返回控制动力学方程中公式(2)制动推力矢量项P的大小上。在飞船制动过程中,因为受到制动发动机本身推力大小与理论数据不同和姿控发动机的影响,真实推力一般是大于理论推力的,在返回控制参数计算过程中一般用推力系数来表示真实推力与理论推力大小的比值。工程中采用理论推力计算返回控制参数,推力系数取值为1.0,一般认为速度增量关机不会影响最后的落点,实际上这样做的结果会造成再入点不准确,对于高精度返回具有较大影响。
表3为实际数据与理论数据再入点精度比对结果,以100 km高度为再入高度,神舟八号、九号飞船实际再入点的位置与理论计算的再入点位置相差较大,飞至相同高度,时间相差7、8 s,从经纬度转换为距离,相距约40 km,飞船并未达到理论再入点,从而影响到落点的准确性。

表3 再入点精度Table 3 Precision of reentry point
以神舟八号、九号的数据为基础,利用仿真打靶对推力系数进行标定。神舟八号实际轨道数据的有效数据为从制动点到推返分离点,神舟九号实际轨道数据的有效数据为从制动点到再入点,设计如下计算方案:实际开机时刻取遥测判断结果,实际开机时间长度取遥测开关机判断结果的差值,并使用开机时刻的实际轨道,在制动时间长度相等的情况下,影响速度增量的因素是推力系数,通过不断修正推力系数,进行轨道外推,神舟八号调整的标准为预报数据与实际轨道数据在推返分离时刻的经纬度、高度一致,神舟九号调整的标准为预报数据与实际轨道数据在再入时刻的经纬度、高度一致,同时得到实际的制动速度增量。
图1中展示了神舟八号、九号推力系数标定结果打靶分析的过程,在使用了推力系数标定结果的情况下,地固系下的预报数据与实际轨道数据的比对效果为:神舟八号实际轨道数据与预报数据到达终点时刻,位置差约为400 m,高度差约为25 m;到达终点高度,位置差约为1 000 m。神舟九号实际轨道数据与预报数据到达终点时刻,位置差约为1 000 m,高度差约为80 m;到达终点高度,位置差约为1 000 m。
考虑了推力系数后的弹道,实际轨道数据与预报数据吻合程度较高,说明推力系数标定结果较为准确。打靶分析最终得到如表4所示的结果。

表4 推力系数与速度增量计算结果Table 4 Result of thrust⁃coefficient and velocity⁃increment

图1 神舟八号、九号推力系数打靶分析结果Fig.1 SZ08 and SZ09 thrust⁃coefficient analysis result
表4说明,由于没有考虑实际推力系数,实际开机时长与理论开机时长对比,神舟八号返回制动过程实际开机时间比理论开机时间短11 s,神舟九号为12 s,但神舟八号、神舟九号实际速度增量达到了理论值。综合表4结果来看,神舟八号、神舟九号再入点并未达到要求,说明理论计算的返回控制速度增量与任务要求有差距,内在原因为未使用推力系数计算速度增量。
使用标定前后推力系数、理论和实际速度增量计算的再入点结果如表5。
可以看到,通过理论推力系数和速度增量计算的再入点位置与实际结果相差约40 km,而通过标定的推力系数和理论速度增量进行计算,使再入点位置与实际结果误差大幅减小,说明使用标定的推力系数计算,可以大幅提高神舟八号、九号再入点的精度。上述分析表明,推力系数的改变,对再入点的位置确实有较大影响。若想再入点位置与理论计算的位置较为一致,有必要使用标定的推力系数进行控制参数计算。

表5 推力系数对再入点的计算影响Table 5 Effect of thrust⁃coefficient to reentry point
按照上述分析获得的实际推力系数标定结果进行升力式返回控制参数速度增量计算,与未使用标定系数计算的结果对比如表6。

表6 推力系数对速度增量计算结果的影响Table 6 Effect of thrust⁃coefficient to velocity⁃increment
通过计算表明,使用实际计算的推力系数,速度增量可减小0.5~0.6 m/s,推力系数影响误差达到0.4%~0.5%,造成再入点位置误差0.7%,从这个量级上看,推力系数对速度增量的影响,不能忽略。因此,标定推力系数,并用于计算返回控制参数,具有重要意义。
4 分析应用
从上面返回初值、制动推力两个方面的分析结果来看,对返回控制精度影响较大的为制动推力系数、其次是返回初值。返回初值的影响误差为0.2%,制动推力系数对速度增量影响的量级为0.5%的误差。
4.1 初值分析应用
从神舟八号任务开始,飞船泄压状态基本固定,从数据分析得出神舟八号、神舟九号泄压对轨道的影响接近,神舟十号任务前,确定了返回前泄压对轨道的影响模型,并应用到了神舟十号返回前的预报中。事后数据分析表明,神舟十号与神舟九号和神舟八号泄压状态一致,中心泄压预报模型合理、准确。
各次任务返回开始时刻预报与实际的初值差异如表7。

表7 初值差异计算结果Table 7 Initial D⁃value in tasks
从神舟八、九、十号飞船的预报与实际的初值差异来看,通过前期泄压影响分析,把泄压模型引入到返回控制参数计算后,提高了返回初值的准确度,将返回制动前轨道的预报精度从约4 km提高到了1 km以内,为返回控制参数计算和GNC导航提供了精确的轨道初值。
4.2 推力系数应用
经过对神舟八号、九号任务数据的分析,神舟十号的推力系数采用了1.08,返回制动过程实际开机时间与理论开机时间误差缩短为3 s。各时刻再入点精度见表8。

表8 神舟十号再入点精度Table 8 SZ10 precision of reentry point
从表8中神舟十号的再入点的表现,结合表4可以看出,相对神舟八、九号任务,神舟十号再入点精度有了较大提升,误差几乎可以忽略,说明推力系数分析结果对精度的提升有明显的帮助。
5 结论
本文以中国载人航天工程返回控制为背景,进行了返回控制精度分析,分析结果在神舟十号任务中得到了应用。
本文把泄压模型引入到计算返回控制参数中,为神舟十号返回控制参数计算和GNC导航提供了精确的轨道初值;采用实际的飞船制动推力系数计算返回控制参数,提高了神舟十号制动控制量的准确性。二者结合使用提高了神舟十号返回控制的落点精度,具有重要的工程应用价值。
对飞船返回轨道设计工作,本文建议,利用实际的制动推力系数进行基准弹道设计,提高飞船返回的基准弹道设计与实际的吻合度。由于在返回轨道总体设计和飞船GNC制导导航基准弹道、制导率设计中,一般都不考虑飞船制动推力系数的影响,因此会对基准弹道的标称再入时间、再入角和再入坐标系等参数设计产生影响,后续进行飞船轨道设计时,建议考虑加入飞船制动推力系数,这样理论会更符合实际,也便于事后对飞船再入后弹道的分析,进而提高整个过程的准确性。
[1] 赵汉元.飞行器再入动力学和控制[M].长沙:国防科学技术大学出版社,1997.
[2] 唐伟,桂业伟,方方.新型升力再入飞船返回舱气动外形选型研究[J].宇航学报,2008,29(1).
[3] 韩鸿硕,陈杰.21世纪国外深空探测的关键技术[J].中国航天,2008(2):38⁃40.
[4] Tigges M.,Crull T.,Rea J.,Johnson W.“Numerical Skip⁃Entry Guidance”,Guidance and Control Conference[J],American Astronautical Society,2007:7⁃76.
[5] 南英,陆宇平.龚平.登月返回地球再入轨迹的优化设计[J].宇航学报,2009,30(5):1842⁃1847.
[6] 王银,陆宇平.月球返回舱跳跃再入弹道特性分析与优化设计[J].南京航空航天大学学报,2010,42(1):21⁃24.
[7] SA Whitmore.Direct⁃Entry,Aerobraking,and Lifting Aeroca-pture for Human⁃Rated Lunar Return Vehicles[J],AIAA,2006.
[8] 张磊,于登云.直接再入大气的月球返回轨道设计研究[J].航天器工程,2010,19(5):50⁃55.
[9] Talole SE,Joel Benito,Mease K D.Sliding Mode Observer for Drag Tracking in Entry Guidance[C].AIAA Guidance,Navigation and Control Conference and Exhibit,2007:20⁃23.
[10] 杨嘉墀,童铠,黄宇民,等.日本深空测控技术[J].飞行器测控学报,2000,19(3):30⁃36.
[11] 贺卫亮,才晶晶,汪龙芳,等.一次发射多次返回的充气式再入飞行器技术[J].载人航天,2011(4):37⁃42.
[12] Wells G,Braun R.An Entry Handbook for the Conceptual Design of Mars Missions[C].1stInternational ARA Days,2006.
[13] 荣纬,陈旭,陈国良.火星探测着陆系统开伞控制方法研究[J].航天返回与遥感,2007,28(4):6⁃11.
[14] 赵晟,王跃峰.深空再入返回飞行仿真及工程应用分析[J].空间控制技术与应用,2011,37(4):58⁃62.
[15] 汤锡生,陈贻迎,朱民才.载人飞船轨道确定和返回控制[M].北京:国防工业出版社,2002:513⁃553.
Analysis and Application of Control Accuracy of Spaceship Return
XU Haitao,XIE Jianfeng,LIU Chengjun,SHENG Qingxuan
(Beijing Aerospace Control Center,Beijing 100094,China)
By dividing the course of spaceship return into different stages,the factors affecting the control accuracy in each stage were analyzed and the thrust⁃coefficient of brake engine was calibrated.Based on the control accuracy analysis,some technical improvements were made.During the return of Shenzhou 10 manned spaceship,pressure relief model was introduced into the trajectory forecasting and thrust⁃coefficient of brake engine was used to calculate the control parameters.The results showed that the control accuracy was effectively improved which was of great significance for the engineering application.The analysis of factors affecting the return accuracy level could serve as a reference for the error reduction of spaceship return control as well as trajectory design.
return control;reentry guidance;pressure relief;thrust⁃coefficient of brake engine;re⁃turn trajectory design
VSS6.4
A
1674⁃5825(2014)01⁃0021⁃05
2013⁃10⁃25;
2013⁃12⁃24
徐海涛(1978⁃),男,学士,工程师,研究方向为航天器返回控制。E⁃mail:pirockster@gmail.com
猜你喜欢
数学大王·中高年级(2022年8期)2022-07-10
神剑(2021年3期)2021-08-14
神剑(2021年3期)2021-08-14
宇航计测技术(2018年3期)2018-09-08
物联网技术(2017年7期)2017-07-20
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
太空探索(2015年8期)2015-07-18
纺织导报(2014年9期)2014-10-31
