
交会对接任务轨道控制规划设计与实施
2014-06-24 14:36李革非刘成军
载人航天 2014年1期
李革非,宋 军,刘成军
(1.北京航天飞行控制中心,北京100094;2.航天飞行动力学技术重点实验室,北京100094)
“交会对接技术与应用”专题
交会对接任务轨道控制规划设计与实施
李革非1,2,宋 军1,刘成军1,2
(1.北京航天飞行控制中心,北京100094;2.航天飞行动力学技术重点实验室,北京100094)
针对我国空间交会对接轨道控制规划技术,研究了轨道交会优化、应急轨道控制、安全轨道防护和发射窗口规划等一系列关键问题。设计了全寿命周期交会对接任务轨道控制规划方案,从目标飞行器发射到飞船返回,对轨道控制进行了全程协同、全局优化。设计了相位、高度、圆化度多目标融合控制算法;建立了规划变量对远距离导引终点六自由度的独立控制方程;设计了标称整体规划与动态逐级规划相结合的多模式规划策略;基于导引终点整体调整和局部调整的方式,实现了正常和应急条件下天地导引交接点的动态规划;提出了基于飞行控制过程建模的导引终点精度分析方法,确定了地面导引向自主导引切换的关键判据;建立了多约束交会对接发射窗口模型,构建了多任务多年度发射窗口集合。交会对接轨道控制规划技术成功应用于神舟八号、神舟九号和神舟十号交会对接任务。
交会对接;轨道控制;导引终点;安全轨道;发射窗口
1 引言
航天器交会对接是建立空间实验室和空间站首先要突破和掌握的关键技术。根据我国载人航天工程三步走的发展战略,十二五期间开展空间交会对接[1]。我国已于2011年9月至2013年6月期间圆满完成了天宫一号与神舟八号、九号和十号飞船三次交会对接任务。
交会对接轨道控制规划技术是对交会对接飞行轨道全过程进行规划,在满足各种约束条件下寻找优化或可行的交会对接飞行轨道控制方案,包括轨道交会优化、应急轨道控制、路径偏差分析、安全轨道防护和发射窗口规划等贯穿于交会对接设计与实施全寿命周期的核心问题,其问题建模、求解理论、算法模型和规划设计具有相当的理论深度和很大的技术难度,是空间交会对接任务必须首先解决的关键技术和难点技术[2]。
飞船发射入轨后,交会对接飞行过程包括八个阶段:远距离导引段、近距离导引段、平移靠拢段、对接段、组合体运行段、撤离段、返回准备段和返回段。在远距离导引段、近距离导引段、平移靠拢段、对接段,由于轨道状态变化大、飞行控制事件多,受到学者的广泛关注,相关研究内容较多[3⁃12]。但涉及交会对接飞行全过程的轨道控制规划较少。
本文按照交会对接任务飞行过程、针对交会对接轨道控制规划的关键和难点,从总体规划、数学建模、策略制定、方案设计以及飞控实施等方面进行阐述,主要包括:
①全寿命周期交会对接任务轨道控制规划;②目标器交会对接轨道控制规划;③飞船多模式远距离导引及重构规划;④组合体与飞船联合轨道维持控制规划;⑤天地导引交接点规划;⑥多约束交会对接发射窗口规划;⑦安全轨道设计规划。

图1 交会对接轨道控制全局协同关系图Fig.1 Chart of rendezvous and docking orbit maneuvers global cooperation relation
2 交会对接轨道控制规划技术研究
2.1 全寿命周期交会对接任务轨道控制规划
根据我国交会对接任务总体方案,交会对接飞行轨道分为目标飞行器初始轨道段、调相轨道段、追踪飞船远距离导引段、自主控制段、对接段、组合体运行段、撤离段、返回段和目标飞行器升轨段等阶段[3],本文围绕实现精准操控对接、组合安全运行和安全健康返回的任务目标进行了全寿命周期交会对接全程协同、全局优化的轨道控制规划方案设计。图1给出了交会对接轨道控制全局协同关系图。
2.1.1 目标器初始轨道段和升轨段的协同优化轨道控制
自主飞行轨道是目标器在两次对接间隔期间的运行轨道。初始段和升轨段要实现目标器自主飞行轨道控制。为保证目标器寿命和减少推进剂消耗,需将目标器推到较高的运行轨道。这样就需要在下次对接前,尽量通过大气阻力的作用使轨道逐渐衰减,降到对接轨道高度,并以主动控制方式作为辅助手段。因此,目标器的自主飞行轨道高度是根据对接时间间隔和大气环境对轨道的衰减影响而选择确定的。交会轨道选择344公里高度两天回归轨道时,在空间环境中等条件下,间隔3个月进行交会对接,目标器的自主飞行轨道可选择约370 km平均高度;间隔6个月进行交会对接,可选择383 km平均高度。
2.1.2 目标器调相轨道段的协同优化轨道控制
调相轨道段实现目标器准确进入满足要求的交会对接轨道[1]:①目标器轨道平面经过飞船首选发射时刻的理论入轨点;②轨道高度为344 km;③轨道偏心率小于0.001;④目标器与飞船的初始相位角为90°。调相轨道段以大气衰减为主、主动变轨为辅,基于高度和相位差优化选择升轨调相或降轨调相,基于高度和圆化度控制与相位控制相结合、基于共面轨道拱线方向选择轨道控制点,构建和制定目标器交会对接轨道控制模型和策略[13]。
2.1.3 飞船远距离导引段、自主控制段和对接段的协同优化轨道控制
根据目标器实际交会对接轨道准确确定飞船发射日期和发射时刻。飞船远距离导引段轨道控制的目的是通过控制轨道高度差,缩短相对距离,同时消除两飞行器轨道平面偏差,实现飞船与目标器相对位置和相对速度满足终点要求,为飞船转入自主控制创造条件。远距离导引终点是根据目标器轨道基于地基和天基测控支持的约束条件,在优先确定对接段的对接点和自主控制段的140 m停泊点和5 km停泊点的基础上,根据自主控制段和对接段的飞行程序安排确定的[1]。
2.1.4 组合体运行段、撤离段和返回段的协同轨道控制
飞船返回约束条件包括返回制动点高度和返回圈升交点经度[14]。飞船返回制动点高度要求为制动点当地高度为344 km,飞船返回圈升交点经度要求为偏差不大于0.15°。通过采用组合体和飞船联合轨道维持控制实现飞船返回约束条件。由于飞船二次对接和撤离段交会试验对圆轨道的要求,为了保证二次对接期间和撤离段期间轨道圆化度满足偏心率小于0.001的要求,组合体轨道维持采用双脉冲变轨方式[14]。
2.1.5 三次交会对接任务实现的协同轨道控制
神舟八号(SZ⁃8)交会对接任务高精度完成了16次轨道控制,神舟九号(SZ⁃9)交会对接任务高精度完成了12次轨道控制,神舟十号(SZ⁃10)交会对接任务高精度完成了14次轨道控制,见表1。
2.2 目标器交会对接轨道控制规划
目标器调相轨道段的轨道控制目标是目标器进入交会对接轨道。目标器交会对接轨道控制规划涉及了轨道共面的相位、高度、圆化度多目标融合的控制算法和基于误差分析和空间环境预报参数辨识的调相控制策略[13]。
2.2.1 轨道共面的相位、高度、圆化度多目标融合的控制算法
建立轨道平面与目标点共面及共面相位的计算模型,基于目标器交会对接轨道与飞船远距离导引轨道不同高度而产生的升交点漂移差,提出了预先补偿漂移差的虚拟共面方式,极大地减小了飞船远距离导引轨道平面偏差修正量,从约20 m/s减小到约0.3m/s[13]。
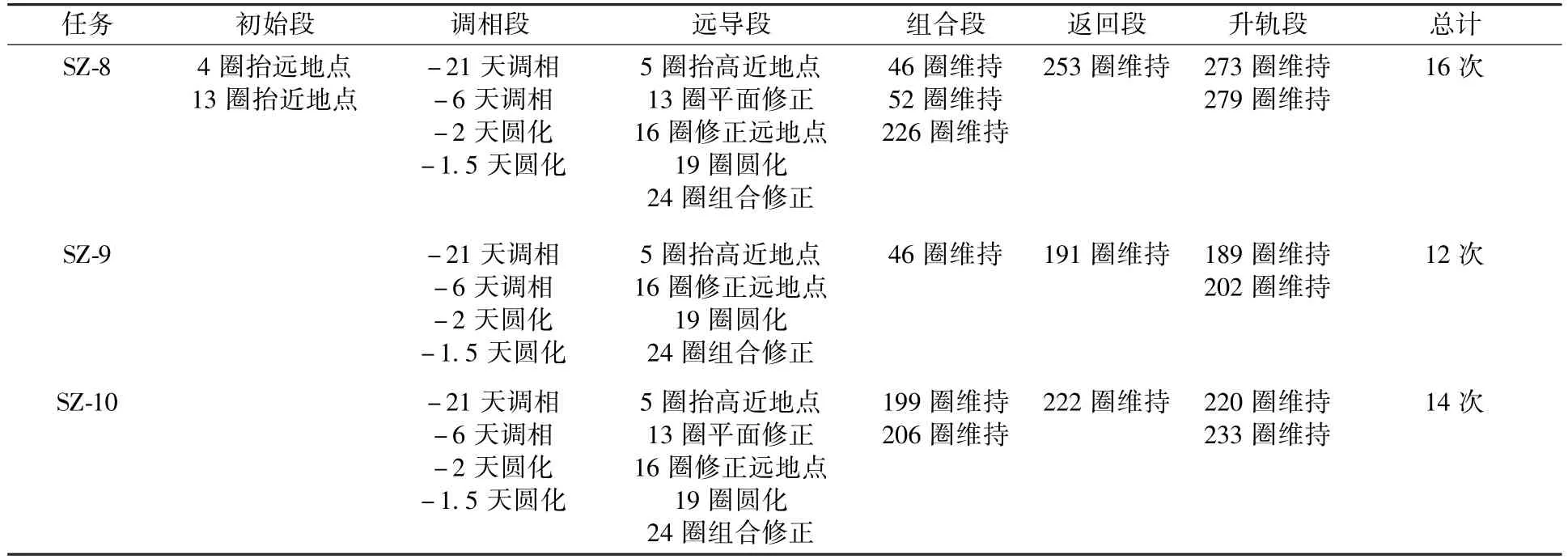
表1 神舟八号、神舟九号、神舟十号三次交会对接任务协同优化轨道控制Tab le 1 O rbitmaneuvers w ith cooperation op tim ization
设计采用相位与高度和圆化度相结合的控制模型,采用内层进行高度和圆化度控制、外层进行相位控制的双层迭代,实现了目标器交会对接轨道相位、高度和圆化度的多目标参数满足要求[13]。
基于大气阻力自然衰减与主动调相控制相结合,采用了升/降轨调相与升/降轨圆化的优化组合自动规划技术,在保证轨道调相控制精度的同时,有效节省了推进剂燃料的消耗[13]。
2.2.2 基于误差分析和空间环境预报参数辨识的调相控制策略
为减小控制量降低目标器燃料消耗,目标器调相控制周期时间较长,各项误差长期累积影响更加显著。综合定轨误差、控制误差和空间环境参数误差情况,进行仿真分析,21 d调相共面相位角最大误差为38°,6 d调相共面相位角最大误差为5.2°,2 d调相共面相位角最大误差为3.5°。基于误差分析结果,为保证相位精度制定了目标器调相控制策略。将调相控制分为三次,第一次控制在飞船发射前21 d或16 d瞄准目标相位;第二次控制在飞船发射前6 d,消除第一次控制的目标相位偏差;第三次控制在飞船发射前2 d和前1.5 d,调整轨道高度满足对接轨道的要求。
调相飞行期间,天宫一号目标器处于连续偏航至三轴对地的飞行姿态模式转换,针对飞行时间长、空间环境误差大、气动参数不确定等不利因素,采用空间环境预报参数辨识策略修正实时大气密度模式,自动切换连续偏航和三轴对地的气动模型,明显提高了轨道相位的长期预报精度。21 d相位预报精度由偏差27°提高至7°,6 d相位预报精度由偏差10°提高至2°。
轨道圆化度优化控制的最佳控制点在共面轨道拱点,但共面轨道拱点往往不能满足控制点在地面测控覆盖区的约束要求。利用连续圈次地面测控覆盖区纬度幅角范围连续变化的特性,建立了调相控制与圆化控制的轨控位置与多圈测控覆盖的匹配关系,解决了优化控制与测控支持的强约束难题。
2.2.3 目标器交会对接轨道控制实施效果
神舟八号、神舟九号和神舟十号任务实现的天宫一号交会对接轨道精度比指标要求高约1个量级,见表2,为圆满完成交会对接奠定了高精度的轨道基础。

表2 天宫一号交会对接轨道精度Table 2 Redenzvous orbit precision
2.3 飞船多模式远距离导引及重构规划
2.3.1 飞船远距离导引原理
飞船远距离导引段轨道控制的目的是通过控制轨道高度差,缩短相对距离,消除两飞行器轨道平面偏差,实现飞船与目标器相对位置和相对速度满足终点要求,为飞船转入自主控制创造条件。远距离导引轨道控制可分为轨道面内机动和修正轨道面偏差机动。包括:提高近地点轨道机动,修正远地点高度机动,圆化轨道机动,轨道平面修正机动和组合修正机动[1]。
标称远距离导引段终点要求为:飞船进入目标器后下方同一轨道平面的圆轨道,与目标器的相对距离约为52 km。在目标器RTN坐标系的相对位置和相对速度为:

飞船轨道控制的是飞船绝对轨道参数的变化,需将轨道相对状态的目标量转化为轨道绝对状态的规划变量进行控制。
2.3.2 多模式远距离导引控制策略
根据我国交会对接远距离导引控制方案[1],定义远距离导引规划变量,见表3。
根据规划变量对导引终点的控制方程,设计多模式远距离导引轨道控制控制策略,见表4。

表3 远距离导引控制方案和规划变量Table 3 Far⁃Distance rendezvous scheme and programming variables

表4 多模式远距离导引轨道控制策略Table 4 Multi-mode far⁃distance rendezvous orbit Maneuver strategy
模式1、模式4的规划变量与目标量的个数相同,模式2和模式3的规划变量个数大于目标变量的个数,模式5的规划变量个数小于目标变量的个数。规划变量数量大于目标量数量时,轨控规划策略有多组解,可根据燃耗最小约束要求确定规划策略的优化解;规划变量数量与目标量数量一致时,轨控规划策略有唯一解;随着冲量的施加,剩下的规划变量不足以瞄准终点的全部目标量时,采用关键目标量综合权重瞄准法。
2.3.3 应急轨道控制重构
远距离导引段发生轨控故障后,在保证预留返回的推进剂后,分别按照远距离导引段、自主控制段进行推进剂使用量评估,后续尽量进行交会对接。针对入轨轨道过低、入轨轨道过高、五次轨控未开机、速度增量超差或姿态超差设计了下列继续进行远距离导引的策略:对接点不变、推迟一圈、推迟二圈、推迟一天,推迟一天加一圈。详见2.5节天地导引交接点规划中的对接圈次调整的远距离导引终点。
应急轨控策略的原则是:应急轨控控制点尽量保持与正常轨控一致;两次变轨之间至少间隔3圈以满足测定轨和上行注入要求;优选对接点不变、推迟最近轨控圈次以尽早实施应急轨控;原对接点不满足要求时,依次推迟对接点。
针对入轨轨道过低或过高、五次轨控未开机、速度增量超差或姿态超差等轨道故障,基于相位调整与高度调整综合控制能力分析,实现快速远导轨道重构控制,预案全面覆盖应急轨道分支,大大提高应急处置能力。
2.3.4 远距离导引轨道控制实施效果
神舟八号、神舟九号和神舟十号任务实现的远距离导引终点精度见表5,比指标高约1个量级,为顺利转入自主控制、实现准确对接奠定了高精度的轨道交接基础。
2.4 组合体与飞船联合轨道维持控制规划
组合体运行段通常是进行大量空间技术试验的飞行阶段,同时组合体运行段与撤离段和返回准备段协同为飞船安全准确返回准备必要的轨道条件。交会对接任务中,组合体运行和飞船返回对轨道多个特征参数提出了明确的要求。组合体飞行试验要求组合体运行轨道为圆轨道;飞船返回要求飞船星下点地面轨迹与标称轨迹重合,使得飞船准确回预定区域的着陆场,同时要求返回制动点高度尽量与标称制动点高度一致,确保返回弹道飞行过程的飞行品质,以满足升力控制、过载和受热等约束要求[14]。
2.4.1 标称升交点设计
仅考虑地球中心引力和形状摄动作用,标称交会对接轨道为2 d(31圈)回归轨道,星下点排列均匀,标称升交点每2 d回归重合。组合体和飞船的奇数天星下点经过主着陆场。实际任务中飞船返回主着陆场的标称升交点经度根据组合体轨道倾角精确确定。
2.4.2 联合轨道维持控制策略
针对标称轨道返回制动点高度处于目标高度下限、对飞船GNC返回控制品质不利的问题,基于组合体维持利用较长时间历程有利于调整升交点经度偏差、而飞船维持控制制动点高度对经度偏差影响较小的优化特性,提出了组合体和飞船联合轨道维持的优化控制模型和策略[14]。
针对组合体运行和飞船返回对轨道多特征参数的要求,建立了升交点经度、当地轨道高度、轨道圆化度的控制方程、以及基于时间关联特性的升交点经度和制动点高度耦合控制方程和偏心率保持的双脉冲耦合控制方程,根据控制目标与飞行时间的相关性和组合体飞行时间较长与飞船飞行时间较短的特点,制定了组合体轨道维持实现升交点经度和轨道圆化度、飞船轨道维持实现制动点高度的联合控制策略,基于轨道半长轴的多组协同优化控制,融合了各次控制之间存在耦合的影响。
组合体维持以实现返回圈升交点经度为目标,通过一次维持2次开机保证轨道圆化度。飞船维持以实现制动点高度为目标,并将高度控制对返回升交点经度的影响量预置到组合体控制。组合体和飞船的联合轨道维持有效地减小了轨道维持总控制量,优化了提前返回圈次的升交点经度。
2.4.3 撤离速度补偿和飞行器模型自动切换
按设计状态,飞船标称撤离速度增量约为0.5 m/s。为了消除撤离带来的轨道干扰,需将撤离速度对升交点经度的影响补偿到标称升交点经度。神舟八号为前向撤离,神舟九号和神舟十号为后向撤离,补偿时需要考虑不同的撤离方向。组合体分离使得飞行器模型出现了由组合体变为飞船的变换。撤离速度补偿和飞行器模型自动变换提高了轨道维持精度。
2.4.4 联合轨道维持控制实施效果
神舟八号、神舟九号和神舟十号任务组合体和飞船联合轨道维持实现的目标状态均满足偏心率、返回升交点经度和制动点高度要求,轨道维持控制精度见表6,为飞船高品质准确返回提供了必要的轨道条件。

表6 组合轨道维持控制精度Table 6 Orbit maintenace accuracy
2.5 天地导引交接点规划
2.5.1 对接圈次调整的远距离导引终点
远距离导引终点是根据远导终点到对接点的飞行程序、测控支持条件确定的。基于对接圈次和导引终点圈次整体调整设计了正常和应急交会对接多模式远距离导引终点,见表7。

表7 多模式远距离导引终点Table 7 Multi⁃mode far⁃distance end⁃points
2.5.2 重入10 km的远距离导引终点
寻的段发生退出自主控制故障后,为节省燃料消耗、实现激光雷达捕获和确保交会飞行安全,地面重新进行远距离导引的终点由52 km调整为约10 km。重入10 km的导引终点目标确定如下:

利用导引终点具有漂移速度3.5 m/s,通过调整导引终点到达时间使得在误差条件下迹向相对距离满足激光雷达的捕获范围。
基于捕获能力、飞行安全、测控支持制定的导引终点调整原则为:①飞船与目标器相对距离在10±4 km以内,选择标称瞄准点。②飞船与目标器相对距离小于6.0 km,选择标称瞄准点前25 min的点,在天链02星跟踪弧段内。③飞船与目标器相对距离大于14 km,选择标称瞄准点后25 min的点,在天链01星跟踪弧段内。
2.5.3 远距离导引终点精度确定
按照地面测控系统对远距离导引段飞行控制过程进行建模,根据地面测控系统的导引能力,对定轨偏差、模型偏差、控制偏差影响下的两飞行器轨道进行交会控制策略计算,使轨道运动分析形成一个闭环过程,通过大样本Monte Carlo仿真计算,确定的导引终点的偏差分布作为导引终点的精度指标,作为任务实施中地面导引与自主控制切换的重要判据[17]。表8给出了交会对接远距离导引精度指标。

表8 远距离导引精度指标Table 8 Far⁃distance redezvous accuracy guideline
2.6 多约束交会对接发射窗口规划
2.6.1 交会对接发射窗口数学模型
交会对接任务发射窗口对轨道日照角、阳光抑制角和轨道共面等因素具有多项约束要求[1]。
太阳日照要求是航天器发射时间选择与确定的主要因素。交会对接太阳日照要求主要有两种。一种是轨道日照角约束,与航天器自身能源、热控、GNC等分系统约束要求相关,综合为一段飞行时间内太阳矢量与轨道平面夹角的要求;另一种是阳光抑制角约束,以激光雷达和CCD相机为主的相对导航光学设备要求太阳光不能直射其视场[15]。
轨道共面是交会对接发射窗口的重要约束条件。追踪器进行轨道平面修正需要消耗大量燃料,应力争将追踪器发射到与目标器共面的轨道上[1]。根据两航天器发射时间间隔,选择目标器和追踪器满足太阳日照要求的日期实施共面发射,在可发射日根据轨道共面条件精确确定发射时刻[15]。
2.6.2 交会对接发射窗口年度集合构建
在多约束交会对接发射窗口的分析和规划中,基于标称轨道和轨道平面平移的快速计算交会对接发射窗口的方法,建立了目标器轨道日照角约束的年度发射窗口集合,建立了追踪器轨道日照角约束以及激光雷达和CCD相机阳光抑制角约束的年度发射窗口集合。分别按照规划追踪器发射窗口和规划目标器发射窗口的2种规划思路,确定目标器和追踪器年度共面窗口集合[15]。
2.7 安全轨道设计规划
2.7.1 近距离接近相对飞行安全保证
根据交会对接寻的段水平双脉冲交会轨道的精确求解,基于优化确定寻的段首末水平双脉冲的控制时刻和控制量,实现了自主接近飞行的安全轨迹设计,在确保近距离快速接近相对飞行安全的前提下,实现了自主测量导航设备的连续跟踪和飞船姿态的稳定性[16]。
以经典C⁃W方程求解的固定时间双脉冲控制量作为初值,通过将控制脉冲的俯仰角近似转化为控制时刻的轨道幅角,调整脉冲控制时刻消除径向速度增量,双重优化确定首末水平双脉冲的启控时刻;引入导引终点位置偏差的比例控制方法,迭代修正求解水平双脉冲的精确控制量[16]。
2.7.2 撤离相对飞行安全保证
针对神舟九号任务撤离脉冲与维持脉冲方向相反造成飞船与目标器碰撞的风险,基于对交会对接任务整体飞行规划影响域最小的分析,提出了通过调整轨道机动时机规避风险的策略。通过天宫一号提前进行升轨的第一次控制,规避了神舟九号与天宫一号相对最小距离为30 m的碰撞风险,排除了重大飞行安全隐患,确保了航天员和飞行器安全。
2.7.3 空间碎片规避安全保证
为了保证航天员和飞行器在轨飞行安全,通过采用微调发射窗口、微调轨道控制量、调整轨道控制策略和实施应急轨道控制等技术手段,实现基于飞行规划的空间碎片碰撞规避策略。
在天宫一号与神舟八号和神舟九号交会对接任务期间,没有发生大于10¯4以上的碰撞概率事件,即均未发现进入红色预警门限的危险目标,目标器和飞船一直处于飞行安全。
神舟十号交会对接任务组合体运行期间,出现空间碎片碰撞概率较大的事件。针对TLE编号为6073的空间目标与组合体轨道最近距离约5.6 km、其中径向距离约800 m的事件,组合体轨道维持策略根据空间碎片预警分析进行了调整,通过微调组合体第一次变轨控制量约0.1 m/s,降低了组合体与空间碎片碰撞的风险,碰撞概率由0.3E⁃14降低至0.2E⁃36,保证了组合体的飞行安全。
3 结论
针对我国空间交会对接轨道控制规划技术,研究了轨道交会优化、应急轨道控制、路径偏差分析、安全轨道防护和发射窗口规划等一系列关键问题。
1)全寿命周期交会对接任务轨道控制规划。目标器轨道控制规划实现了相位、高度、圆化度多目标融合强约束下准确进入交会对接轨道。基于导引终点控制方程实现了飞船多模式远距离导引和重构规划,确保飞船准确到达导引终点。组合体与飞船联合轨道维持控制规划圆满解决了保证组合体平稳运行和飞船准确返回的技术难题。
2)天地导引交接点规划。利用相对漂移速度调整导引终点实现了天地导引交接点的动态规划,基于飞行控制过程建模分析方法获得了导引精度,为飞船顺利转入自主控制、实现准确对接奠定了高精度的轨道交接基础。
3)多约束交会对接发射窗口规划。提出了标称轨道平移的发射窗口计算方法,基于日照角、抑制角和共面等多约束构建了天宫一号和神舟八号、神舟九号和神舟十号的多年度发射窗口集合,圆满实现了关键特征点对能源、光照、测控等条件的需求。
4)安全轨道设计规划。优化的寻的首末水平双脉冲实现了自主接近飞行的安全轨迹,基于飞行方向的控制时机调整和基于飞行规划的空间碎片碰撞规避,确保了交会对接任务的飞行安全。
在神舟八号、神舟九号、神舟十号三次交会对接任务中高精度实施了协同优化的轨道控制,实现的目标器交会对接轨道、飞船远距离导引、飞船返回制动等关键特征点精度高于指标要求1¯2个量级,为我国交会对接任务圆满成功做出了重大贡献。突破了交会对接轨道交会优化、应急重构、天地交接点动态规划等一系列核心关键技术,其研究成果在我国后续空间站和载人登月工程中具有广阔的应用前景。
[1] 周建平.载人航天交会对接技术[J].载人航天,2011,2:1⁃8.
[2] 唐国金,罗亚中,张进.空间交会对接任务规划[M].北京:科学出版社,2008:22⁃29.
[3] 王忠贵.我国首次空间交会对接远距离导引方案设计与飞行验证[J].中国科学:技术科学,2012,42(7):764⁃770.
[4] Prussing J E.Optimal Impulse Linear Systems:Sufficient Conditions and Maximum Number of Impulses[J].Journal of the Astronautical Sciences,1995,43(2):195⁃206.
[5] Hughes SP,Mailhe LM,Guzman J J.A comparison of trajectory optimization methods for the impulsive minimum propellant rendezvous problem[J].Advances in the Astronautical Sciences,2003,13:85⁃104.
[6] Carter T E,Alvarez SA.Quadratic based computation of four impulse optimal rendezvous near circular orbit[J].Journal of Guidance,Control and Dynamics,2000,23(1):109⁃117.
[7] 郭海林,曲广吉.航天器空间交会过程综合变轨策略研究[J].中国空间科学技术,2004,24(3):60⁃67.
[8] 龚胜平,李俊峰,宝音贺西.多冲量近圆轨道交会的部分变量瞄准法[J].空间控制技术与应用,2009,35(1):13⁃18.
[9] 马艳红,胡军.基于序优化理论的三脉冲交会燃料寻优[J].宇航学报,2009.30(2):663⁃668.
[10] 顾大可,段广仁,张卯瑞.有限推力交会的最省燃料轨迹[J].宇航学报,2010,31(1):75⁃81.
[11] 佘志坤,薛白,丛源良,等.最优双冲量交会问题的数学建模与数值求解[J].宇航学报,2010,31(1):155⁃161.
[12] 蔡远文,李岩,任江涛.在轨服务飞行器自动寻的段的接近策略分析[J].宇航学报,2011.32(10):2175⁃2180.
[13] 李革非,宋军,谢剑锋.目标飞行器交会对接轨道设计和控制[J].中国空间科学技术,2011,6(3):26⁃34.
[14] 李革非,宋军.组合体与飞船轨道多特征参数联合优化控制[C]//2013中国控制会议,2013,7:5023⁃5028.
[15] 李革非,陈莉丹,唐歌实,等.多约束交会对接发射窗口的分析和规划[J].宇航学报.2011,11(32):2463⁃2470.
[16] 李革非,宋军.交会对接寻的段水平双脉冲交会轨道的精确求解[C]//第一届全国航天飞行动力学技术研讨会. 2013,10:296⁃303.
[17] 李革非,陈莉丹.交会对接地面导引精度分析研究[C]//第二届全国航天飞行动力学技术研讨会.2012,2:357⁃363.
Design and Implementation of Orbit Maneuver Programming in Rendezvous and Docking Missions
LI Gefei1,2,SONG Jun1,LIU Chengjun1,2
(1.Beijing Aerospace Control Center,Beijing 100094,China;2.Science and Technology on Aerospace Flight Dynamics Laboratory,Beijing 100094,China)
Aiming at the orbit maneuver programming technique for China′s rendezvous and docking mission,a series of significant issues concerning the orbit rendezvous optimization,emergency orbit maneuver,safety orbit protection and launch window scheme were studied in this papar.The schemes of orbit maneuvers programming from the launch of the target vehicle to the return of the chase spacecraft were designed and the orbit maneuvers were coordinated and optimized during the full life⁃span of RVD.The multi⁃object syncretized control algotithm for orbit′s phase,height and eccentricity was proposed.The orbit maneuver variables′independence control equations were established for the far⁃distance rendezvous6⁃dimension endpoints.With the combination of normal whole programming and dynamic step programming,multi⁃mode orbit rendezvous strategies were planned. Based on the overall adjustment and partial adjustment of the guiding endpoint,normal and emergency rendezvous endpoints were achieved dynamiclly.The analysis method for the rendezvous endpoint accuracy was proposed based on RVD flight control process modeling and the key criterion for the switch of the ground guiding to the self determination guiding was determined.Multi⁃restriction RVD launch window model was established and the RVD launch window for multi⁃mission and multi⁃year aggregations are constituted.The orbit maneuver programming techniques were successfully ap⁃plied in SZ⁃8&SZ⁃9&SZ⁃10 RVD missions.
rendezvous and docking;orbit maneuver;guiding endpoint;safety orbit;launch window
V412.4+1;V526
A
1674⁃5825(2014)01⁃0001⁃08
2013⁃10⁃25;
2013⁃12⁃29
国家863计划(2011AA7042017)
李革非(1966⁃),女,博士,研究员,研究方向为航天动力学与轨道控制。E⁃mail:sophiebacc@sina.com
猜你喜欢
作文小学高年级(2022年4期)2022-05-27
军民两用技术与产品(2021年10期)2021-03-16
中学课程辅导·教育科研(2019年3期)2019-09-10
当代水产(2019年1期)2019-05-16
煤矿安全(2019年2期)2019-03-20
作文周刊·小学二年级版(2016年45期)2017-07-18
太空探索(2016年9期)2016-07-12
军事运筹与系统工程(2016年4期)2016-07-10
空间控制技术与应用(2015年1期)2015-06-05
创业家(2015年1期)2015-02-27
