分析模糊控制在抑制直流无刷电机转矩脉动中的应用
2014-05-28 06:19李森
商 2014年42期
关键词:模糊控制
李森

摘 要:根据直流无刷电机出现转矩脉动的最根本原因,采用模糊控制算法,设计一种电流控制器,使其采用模糊算法控制非换相电流,实现降低换相引起的转矩脉动。并通过仿真实验验证了该系统具有强鲁棒性,改善了系统的动静态特性,有效抑制转矩脉动的产生。
关键词:直流无刷电机;转矩脉动;模糊控制
1、引言
直流无刷电机(BLDCM)优点众多,如具有优良的调速性能、不具有励磁损耗、性能好、转动惯量小等,所以在工业中应用广泛[1]。对于伺服控制系统而言,转矩控制尤为关键,但是转矩脉动的产生严重阻碍电机速度控制特性,所以消除转矩脉动是增强伺服控制系统各项指标的核心[2]。使BLDCM出现转矩脉动的因素有许多,如谐波、齿槽效应、磁通畸变等等,但使其产生最根本的原因是相电流的换相[3]。本文设计一种基于模糊控制的电流控制器,用以控制非换相相电流,让其在不同速度段仍为连续平滑,从而让换相引起的转矩脉动变小。
2、模糊控制器的设计
2.1模糊化设计
若系统给定突然变化,出现状态或结构干扰使系统参数发生变化,由该时刻的电流偏差和电流偏差变化趋势,根据专家经验,通过调节PWM调制波的幅值大小来控制系统的稳定过程。
此控制器为双输入单输出,输入变量均与电流有关,分别为e及ec,输出变量为u,e和ec表达式如下:
Iref(n)-电流的反馈值;T-采样周期
e是电流的偏差、ec是电流偏差变化率、 u是PWM調制信号,它们三个都是交叠对称分布的隶属度函数,并且三个变量论域都是
X={-4,-3,-2,-1,0,1,2,3,4}
将X的论域分为五个语言变量,分别为 [NB](负大)、[NS](负小)、[ZE](零)、[PS](正小)、[PB](正大)[4],各语言变量值如图2-1所示。
2.2模糊控制规则设计
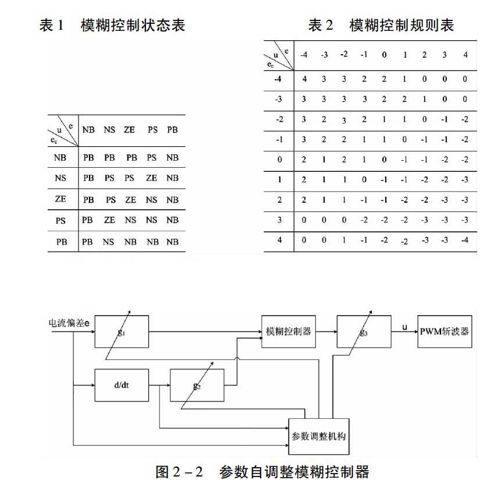
要想使控制系统输出响应的动静态特性达到最佳控制效果,就要减小换相时的转矩脉动,使换相相输出电流波形保持平滑[6]。根据专家经验数据及现场工人实践工作归纳,可以得到模糊条件控制状态表,如下表1。
根据表1、可制定出模糊控制规则表,如表2所示。
2.3 模糊控制方法的实现
模糊控制器结构如图2-2所示:
当e和ec很大时,g1和g2应选比较小的数值,g3选比较大的数值,这样可以保持系统稳定性并降低系统的上升时间;当e和ec很小时,g1和g2应选比较大的数值,g3选比较小的数值,这样可减小甚至消除超调,使系统保持在稳态精度中。
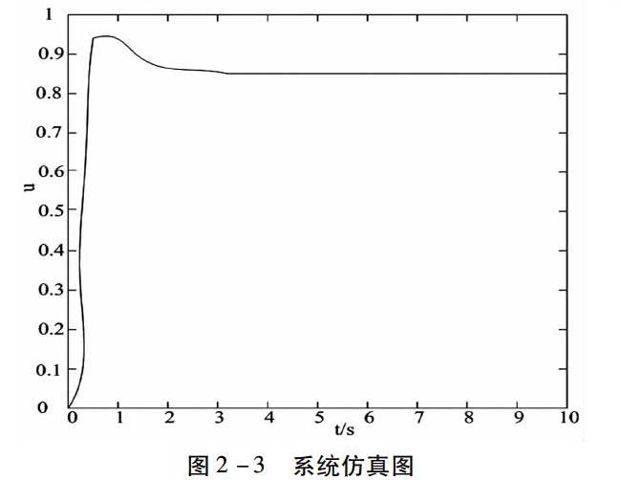
3、系统仿真
通过仿真实验验证系统的控制效果,输入量为e和ec,得到单位阶跃响应,从仿真图2-3像能够得到,模糊控制缩短了该系统的调节时间,使超调量变小,使稳定性增强,使其动静态特性都得到明显改善。
4.结论
本文采用模糊控制,设计了电流模糊控制器用以控制直流无刷电机非换相电流,从而降低由于换相引起的转矩脉动。通过仿真结果可以看到,BLDCM控制系统动静态特性有所增强,减短了调节时间,超调量降低,取得比较理想的控制效果。(作者单位:吉林省电子信息技师学院)
参考文献:
[1] 张建勇. 无刷直流电动机驱动控制器设计.家电科技.2011(7)
[2] 齐蓉、林辉.无刷直流电机换向转矩脉动分析与抑制.电机与控制科学.2006(3)
[3] 谭建成. 无刷直流电动机的换向转矩波动分析. 微电机.2011(6)
[4] 刘庆雪、郭涛.变速恒频风力发电机组的模糊控制研究.电气传动自动化.2011(5)
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
电源技术(2017年1期)2017-03-20
环境科技(2016年5期)2016-11-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22