
重复控制在逆变器无互联线并联系统中的研究
2014-04-23 02:22魏金成
电源技术 2014年6期
刘 烨, 魏金成, 石 倩, 陈 勇
(1.西华大学电气信息学院,四川成都 610039;2.湖南大学电气与信息工程学院,湖南长沙 410012)
目前关于逆变器并联、采用互联线的控制方法已经很成熟[1-2],即通过检测其它逆变器模块的信息达到控制效果。但有信号联线的存在,对逆变器并联距离限制很大,不能满足真正意义上分布式发电的要求。逆变器无互联线并联技术[3-4],展现出良好的发展前途。传统的逆变器无互联线并联系统多采用PI控制,在稳态性能和带非线性负载时效果欠佳,并且一直以来控制精度的提高都是无联线并联的关键点。
重复控制[5]是最近几年才发展起来的一种新型逆变器控制方案,它通过在正弦指令上加一同频的周期性补偿信号可得到非常好的正弦输出波形。它利用逆变器中死区效应、非线性负载、扰动等因素引起的干扰都是周期性的,导致谐波的畸变也是周期性的特点,通过重复控制器的设计降低谐波,具有很好的稳态特性和带非线性负载能力。PI控制有较好的动态特性和良好的鲁棒性是一种经典控制方法。本文提出了将重复控制与PI控制结合的复合控制算法引用到逆变器的无联线并联系统中,可得到畸变量很低的输出波形,进一步增强了环流抑制,减少稳态误差,并使系统有比较好的带非线性负载能力。
1 逆变器的数学模型
单相全桥逆变器的主电路模型如图1所示,RL为滤波电感的等效电阻,电感L与电容C构成输出滤波器,E为母线电压,Ui为滤波器的输入电压,U0为滤波器输出电压,现以逆变器带阻性负载R做分析。

图1 单相全桥逆变器结构图
则系统的传递函数U0/Ui为:

由于重复控制的参数的设计需要在逆变器空载时进行,所以在这里取R→∞,RC对系统影响很小在这里忽略不记。此时等效为二阶模型:

由 L=1.5mH,C=40μF,RL=1 Ω 在空载时,G(s)为:

采样频率为10 kHz则用零阶保持器离散化式(3)为:

2 重复控制器的设计
重复控制是基于内模原理的一种控制思想,理论上能够消除周期性干扰信号达到真正意义上的稳态无静差。幸而逆变器的干扰通常是周期性的,当内模中的数学模型设置为式(5)内模时:

不论信号波怎样,只要它为基波频率出现,输出就为输入信号以基波周期为步长的累加。如果把这个重复信号发生器放到闭环系统中,并设计出完整的重复控制器,那么闭环控制系统能够无静差地跟踪周期信号。在改进型重复信号发生器的基础上,添加前馈来增加系统的动态响应速度,构成一个完整的“嵌入式”重复控制器如图2所示。

图2 "嵌入式"重复控制[5]结构框图
把控制对象G(z)当成一个稳定系统,给定信号r,输出y,把原有的重复控制器当作一个嵌入部件,通过在原有指令上修改Ur来减少误差e,这样就构成了“嵌入式”重复控制器。
重复控制器包括周期延时环节Z-N、改进内模的低通滤波因子Q(z)和稳定化补偿器C(z)三部分的设计。其中载波比N=TC/T=200。
通常Q(z)用来增加系统稳定性,可以为低通滤波器,也可是常数,当取低通滤波器时,要求Q(z)本身是稳定的,而为了设计简单,这里Q(z)初步取常数0.95。这样取参数只要使系统高频谐波增益快速下降到-26 dB以下(抑波因子为0.047 6时)系统就可以稳定。所以重复控制器的设计主要是稳定化补偿器C(z)的设计。

式中:Kr为重复控制增益;Zk为相位补偿器;S(z)为滤波器,主要消除谐振峰值,并使高频增益快速衰减。
在这里S(z)采用陷波器S1(z)[消除G(z)的谐振峰值]与二阶滤波器S2(z)提供高频衰减结合来构成。陷波器又称零相移滤波器,可对特定频率有强衰减作用,对周围影响很小。可在谐振点有最大衰减。其传递函数如式(7):

把 Z=ejθ代入式(6)得:

S1(θ)为实数,α∈(0,2)时,S1(θ)有正有负,说明 S1(z)相位在0~π之间变化。当α大于2时S1(z)相位变化为零。α=2时,S1(z)对特定频率有最强衰减。此时有:


S2(z)频率为LC滤波器的谐振频率与截至频率间的一频率。则取 S2(z)为:

3 复合控制策略
单台逆变器输出电压的复合控制策略原理[6]如图3所示,系统的前向通道把PI-P双闭环控制与重复控制器并联共同对输出电压产生作用。PI调节器主要是改善系统的动态性能,减小系统受扰动时的振荡和超调。稳态主要是重复控制器起作用减少周期性扰动产生的畸变,减低系统的THD。
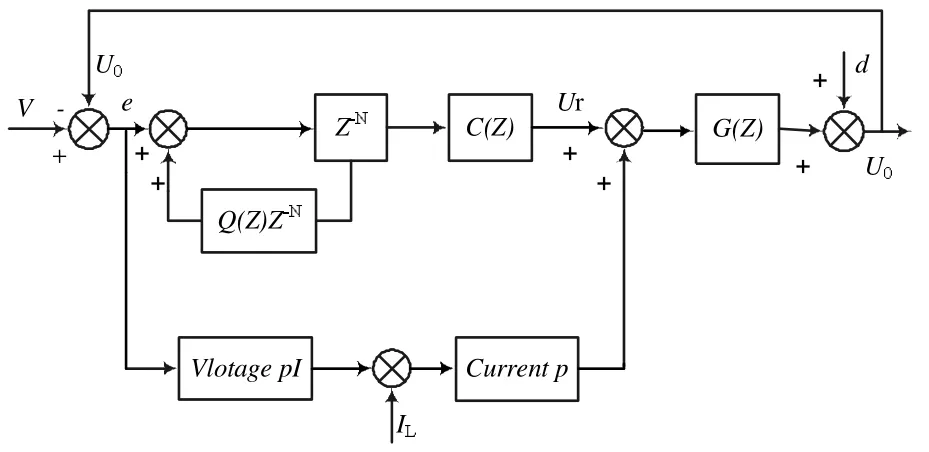
图3 复合控制策略框图
当系统受到如负载突变等扰动时,由于重复控制存在周期延时,所以重复控制器输出不变,而PI控制却可以根据突变产生调节作用。一周期后重复控制器加入调节作用,使得跟踪误差减少,PI控制的作用减弱直到系统达到新的平衡。
4 系统仿真及结果分析
本文利用MATLAB仿真软件对由两台单相逆变器构成的无互联线系统进行复合控制的仿真实验。仿真参数的选择:E=300 V,U0=220 V,f=50 Hz,采样频率为 10 kHz,L=1.5mH,C=40 μF,RL=1 Ω,Kr=0.96,R=10 Ω。
阻性负载时仿真波形如图4和图5所示。


图5 复合控制电压输出波形及THD分析、输出电压误差波形和环流波形
通过仿真结果(图4和图5所示),对比图4(a)与图5(a),采用PI控制时逆变器并联系统输出的电压波形畸变较大,精度相对较低,THD=0.48%。采用重复控制结合PI控制的复合控制方法后,系统的跟踪精度与系统稳定性得到提高,有很好的稳态输出电压波形,THD=0.27%。而且复合控制下的稳态误差要比单独PI控制的明显变小。从图4(b)与图5(b)的对比,传统PI控制下的输出电压误差稳定后峰值在0.039(上下0.001)波动,而在复合控制下输出电压误差稳定后峰值明显减小,读数在0.018(上下0.001)波动。整个并联系统的环流图4(c)与图5(c)也能看出,由于重复控制的加入使得整个无联线并联系统的控制精度提高了,环流波动变小了,环流特性也变好了。
对复合控制下并联系统突加负载进行实验,开始时逆变器并联系统对一个10Ω负载供电,在1个周期后突然加另一个10Ω的负载,在第2.5个周期时断开此负载,此时系统电流波形如图6所示。
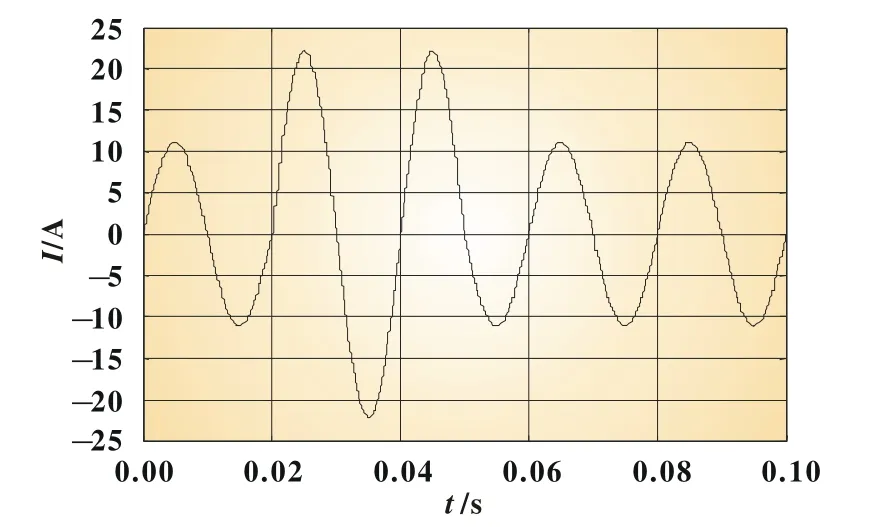
图6 逆变器并联系统突加负载电流波形图
从图6看得到在复合控制作用下突加负载时及负载突然断开时系统的输出电流波形十分平滑,效果很好。这证明了PI控制提高了复合控制的动态响应速度,使系统具有很好的动态特性。
复合控制带非线性负载实验,这里采用逆变器带整流桥负载。整流桥负载参数电容参数200μF,并联电阻为40Ω。实验波形如图7所示。
从图7可见带整流负载时,输出电流波形依然很稳定,完全能够满足实际需求。证明了重复控制结合PI控制的复合控制方法大大提高了PI控制下的带非线性负载的能力。

图7 带非线性负载的输出电流波形
5 结论
本文对无互联线单相逆变器并联系统进行了仿真分析。提出把重复控制引用到无联线逆变器并联系统的控制中来。通过实验分析了重复PI控制法对并联系统动态静态性能的改善,以及带非线性负载能力的提升,并且进行重复控制器参数设计。实验证明了方法有效可行。
[1]WU T S,CHEN Y K,HUANG Y H.3C strategy for inverters in parallel operation achieving an equal current distribution[J].IEEE Transaction on Industrial Electronics,2000,47(2):273-281.
[2]陆冬良.基于重复控制的单极性SVPWM逆变电源研究[D].四川:四川大学,2006.
[3]GUENERO JM,VICUNA L G,MATAS J,et al.A high-performance DSP-controler for pauallel operation of online UPS systems[C]//IEEE Applied Power Electronics Conference and Exposition.Califonia:APECE,2004.
[4]MOHAMMAD N,JURG JW,KEYHANIA.Stability analysis of load sharing control for distributed generation systems[J].IEEE Transaction on Energy Conversion,2007,22(3):737-745.
[5]裴雪军,康勇.基于重复控制与瞬时值反馈控制的逆变电源研究[J].电力电子技术,2002,36(1):20-21.
[6]李俊林.单相逆变器重复控制和双环控制技术研究[D].武汉:华中科技大学,2004.
猜你喜欢
大电机技术(2022年3期)2022-08-06
遥测遥控(2022年1期)2022-02-11
核科学与工程(2021年4期)2022-01-12
中学生数理化·中考版(2021年10期)2021-11-22
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
中国惯性技术学报(2017年1期)2017-06-09
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
