Translohr胶轮导向电车电气系统技术特点研究
2014-03-23 05:26钱广民
城市轨道交通研究 2014年4期
钱广民
(天津滨海快速交通发展有限公司,300457,天津∥工程师)
Translohr胶轮导向电车电气系统技术特点研究
钱广民
(天津滨海快速交通发展有限公司,300457,天津∥工程师)
介绍了天津开发区新交通试验线所采用的Translohr型100%低地板胶轮导向电车的主要技术特征和电气系统的主要构成,分析了该型电车的高压系统、牵引控制单元、低压系统、电车车载计算机系统及CAN(控制器局域网)现场总线等主要技术特点,为国内有轨电车的设计提供参考。
Translohr胶轮导向电车;牵引控制单元;电气系统
Author’s addressTianjin Binhai Mass Transit Development Co.,Ltd.,300457,Tianjin,China
2007年天津建成了我国第1条现代有轨电车线路——开发区洞庭路新交通试验线。该试验线南起津滨轻轨泰达站,北至十三大街学院区北站,全长7.86 km,共设14座车站,途经生活区、工业区、学院区,是1条纵贯开发区南、北方向的轨道交通线,也是亚洲首条采用Translohr胶轮导向电车的商业运行线路。
本文对该线路配属的Translohr型电车电气系统技术特征加以分析。
1 Translohr胶轮导向车电车简介
Translohr型电车是法国劳尔公司历经10年开发的100%的低地板胶轮导向电车。具有环保、低噪声、转弯半径小、爬坡能力强、自重轻、行车限界小的特点。新交通试验线采用Translohr STE3型电车,全长25 m,采用3模块编组方式。车辆由2节司机室(ME)模块、2节联接(MI)模块、3节乘客(MP)模块组成,如图1所示[1]。
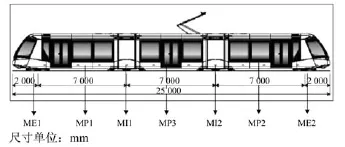
图1 Translohr STE3电车编组方式
Translohr STE3型电车的电气部件如高压盒、牵引控制单元、制动电阻、牵引电池包等均采用模块化设计,布置于车顶。两车头驱动桥内各布置1台鼠笼式异步电机。车下部分主要是电车导向机构设备。其总体技术参数如下:
车体长度25 000 mm,车体宽度2 200 mm,地板高度260 mm,车门数量6个(每侧3个);定员载客量167人,最大载客量212人,空车质量23 600 kg;最高运行速度70 km/h;线路最大坡度13%,最小转弯半径10.5 m;供电电压DC 750(500~900)V;最大加速度1.3 m/s2,紧急减速度5 m/s2;制动类型为再生制动/电阻制动/空气制动/盘式制动;供电方式为DC 750 V架空接触网及自带牵引电池包(最大满足运行500 m);车速60 km/h时,车内噪声为69 dB,车外7.5 m处噪声为80 dB。
2 电车电气系统
Translohr电车电气系统主要分为供电系统、牵引制动系统和命令控制系统3部分。
2.1 供电系统
Translohr电车通过DC 750 V接触网的电源供电维持设备的正常运行。电车的供电系统由750 V直流高压网络、400 V交流中压网络和24 V直流低压网络等3套级别不同的供电网络构成。
2.1.1 直流高压网络(750 V)
750 V直流高压网络为主供电电路,主要为乘客模块的取暖设备、牵引逆变器和辅助逆变器供电。750 V直流高压网络设备安装在电车的乘客模块(MP模块)的顶部。构成电能生成回路的主要设备包含受电弓、高速断路器及其控制电路、避雷器、高压盒、牵引逆变器接地回流装置等。如图2所示。
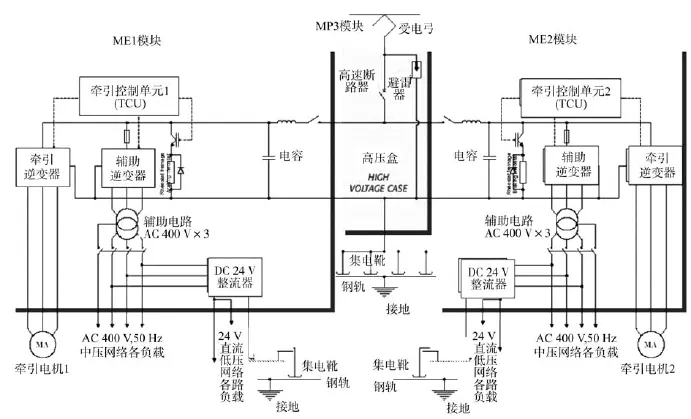
图2 Translohr STE3电车供电示意图
电车有2组牵引单元。电车通过安装在MP3模块的受电弓,从DC 750V架空接触网上受流;高压母线通过中间模块的高速断路器,分别送到ME1模块和ME2模块上的牵引逆变器及辅助逆变器上。牵引系统采用1个牵引逆变器带1个牵引电机的“1拖1”的方式.牵引逆变器在牵引控制单元(TCU)的智能控制下变频、变压供电至牵引电机。
高压侧的高压盒内分别有2组不同的差异继电器,用于检测进入电车的电流和经过集电靴回流到变电所的电流之间的差异。如果差异大于90 A,电车报警,降弓,并瞬间将高压盒终端带闭合,此时,DC 750 V供电电流在车内直接流通,回流至集电靴,排放至钢轨上,防止乘客在车内触电。
2.1.2 交流中压网络(400 V)
400 V交流中压网络电路系统主要用于牵引逆变器水冷系统供电、牵引蓄电池充电,以及乘客和驾驶室模块空调(A/C)设备、空压机、驾驶模块加热设备等的供电。
400 V交流中压网络供电系统由2个辅助逆变器提供。这2个辅助逆变器为设备提供冗余性电源,维持机车的运营。如果2个辅助逆变器中有1个发生故障,可通过高压盒内的电流接触器闭合,用于AC 400 V辅助线路的扩展供电。即由非故障端的辅助逆变器向电车两端(ME1和ME2)中压网络各负载提供AC 400 V电源。
2.1.3 直流低压网络(24 V)
24 V直流低压网络电路系统主要用于车辆驾驶操作和车辆监控功能,为车载计算机系统(CAOS)、无线电通讯系统(PCC)、车辆运行辅助系统、内部照明设备等供电。
24 V直流低压网络电路系统由AC 400 V× 3、50 Hz辅助电路系统中的2个24 V整流器和1组备用的24 V铅酸电池包组成。2个整流器可保证电车弱电设备的正常供电。如果2个变流器都发生了故障,备用电池仍能供电30 min。
2.2 牵引制动系统
2.2.1 车辆牵引及控制
正常操作情况下,位于车辆两端的电机负责牵引车辆。每个电机由牵引逆变器控制。逆变器由高压回路供电。每个逆变器由TCU控制。2个TCU接入车辆有线串行网络。车辆最大加速度限制为1.3 m/s2,且不考虑车辆载荷和线路条件。
在牵引系统(逆变器或电机)发生故障时,司机通过中央信息控制台得到故障报警。故障系统被自动隔离,即逆变器前的触点断开,最大加速度被限定在0.5 m/s2以内。
2台牵引电机为3相4极自冷式异步电机。电机的主要性能参数为:最大转矩2 200 Nm,平均转矩1 000 Nm,最大功率220 kW,最大转速4 200 r/min,平均功率166 kW时其对应的转速为1 500 r/min,绝缘电压为3 800 V(持续1 min),冷却方式为自冷却。
牵引逆变器为两极电压逆变器,内部采用IGBT(绝缘栅晶体管)功率半导体组件,安装在乘客模块的车顶。逆变器箱由通风管道、密封部分组成。密封部分包括所有的IGBT模块、DC 750 V输入的电容、AC 400 V输出滤波器、线性接触器和命令控制系统支架。通风管道包含水/气热交换器、水冷却循环的部件、冷却风扇、滤波器线圈和辅助逆变器的输出变压器。逆变单元采用水和乙二醇的水循环冷却系统制冷。
TCU控制着2个牵引逆变器,具有以下功能:
(1)通过逻辑电路接收信息,包括牵引扭矩大小、司机室模式操作请求、运行方向、CAN(控制器局域网)的选择、电机转速、在安全制动状态下禁止的牵引命令等。
(2)接收来自CAN的信息,包括要求降低电机转速、要求限制电机转速、要求切断电机牵引、要求关断辅助负载,以及确保备用电池充电等信息。
(3)具有局部诊断功能,并且向CAN发送数据,包括车辆速度、电机转速、牵引信号、制动信号、倒车信号、零速信号、备用电池充电状态、接触器和电路制动状态(牵引、制动、惰性)、备用电池充电、备用电池温度、电机温度、线圈温度、变压器温度、制动电阻温度、冷却温度、牵引力值和接触网电压等。
(4)检查和管理传给IGBT的控制信号,由独立的多处理器DSP(数字信号处理器)模块执行该功能。对收集的信号进行计算,并据此控制电机转矩和转速。当收到制动指令时,可抑制牵引。
(5)接收来自传感器的信息,这些传感器包括:1个位于电机上的速度传感器(传输与电机转速成正比的各种频率脉冲),7个探热仪(电机定子、备用电池、线圈、变压器、制动电阻、冷却装置),2个电机相电流传感器,4个备用电池电流传感器,2个750 V直流电压传感器,1个24 V直流电压传感器。
2.2.2 车辆制动及控制
电车的制动由减速控制单元(DCU)控制。DCU根据刹车踏板的角度调节制动力,可触发电制动和气制动2种制动方式。电制动是指牵引电机的电动制动。电制动环路由电机、逆变器、TCU组成。电制动启动后,牵引电机变为发电机,产生的电能通过TCU检测:如果电压低于900 V,则返回电网;如果电压高于900 V,则由1个直流变直流的“变阻斩波器”控制,通过损耗电阻将电能消耗掉。气制动是指DCU对每个轴上成比例的气继动阀(EVP)进行电控的气压制动。
电车的制动指令通过制动踏板来传递,在踏板的第1行程,电制动启动,仅在电制动不足时,DCU触发气制动;在踏板的第2行程,气制动被启动,该踏程应对于紧急制动。Translohr STE3型电车的电制动及气制动示意图如图3所示。
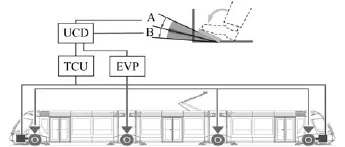
图3 Translohr STE3电车电制动及气制动示意图
制动系统有以下工况:
(1)常用制动:当制动踏板处于第1行程时,启动常用制动。其制动方式属于电制动。常用制动可确保司机安全可靠地控制车辆速度,常用制动参数的设定要考虑到满足乘客舒适性的要求。
(2)紧急制动:当制动踏板处于第2行程时,启用紧急制动。其制动方式属于气制动。紧急制动是常用制动的最大等级,主要是为了保障乘客、司机的安全。该级最大减速度可达5 m/s2。
(3)安全制动:当车辆出现红色故障、安全环路断开时,或者按下司机室内的紧急按钮后,安全制动被启动。
(4)保持制动:当车辆停止时,保持制动被DCU自动启动,从而有效防止车辆溜车现象发生。
(5)停放制动:当车辆停止,且当驾驶模式没有被选择时,停放制动被激活,处于工作状态。其制动方式为弹簧施加制动力。
(6)最终制动:由司机座椅下的手柄启动,即使没有气能也可将车辆停止,为最终制动措施。
3 电车命令控制系统
Translohr电车命令控制系统采用2种制式的控制系统,一种是基于CAN的车载控制系统,用于传送非安全命令信号;另一种是基于SIL-3标准的安全板卡类监视系统,用于监视检测所有的危险状态,传送安全命令信号。
3.1 基于CAN的车载控制系统
车载计算机系统是车辆命令控制系统的核心,负责电车几乎所有数据的分析和处理工作,实现电车设备监控、诊断功能,并提供接口,通过接口可下载电车运行数据及故障信息。该系统单元放置在司机室操作板下的空间内,采用屏蔽电缆连接。电缆在车顶封闭布放,用于隔离AC 400 V和DC 750 V电源信号,防止电磁干扰。
车载计算机系统主要由CAN(互为冗余的CAN A和CAN B)、网络主机、I/O模块、辅助CAN(CAN C)等组成,如图4所示。
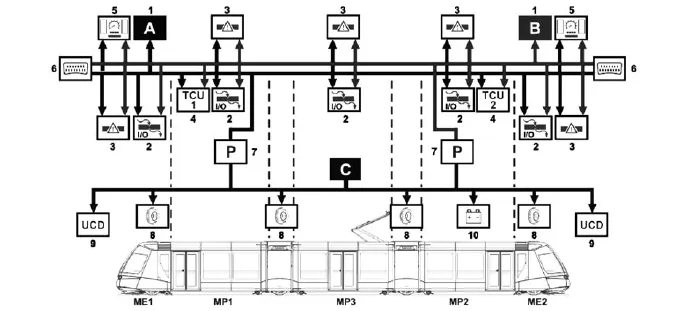
图4 Translohr STE3电车车载计算机系统网络拓扑图
CAN由2条串行协议传输线组成,用来传送非安全命令信号。网络连接系统命令单元。网络和接口均为冗余配置,司机可选择CAN和网络主机。
网络主机置于司机室端模块的机架内。每台车有2个主机,每个主机专用1个网络。网络主机是命令系统的中央单元,主要负责:①和两个牵引系统通信;②接收控制面板的指令并回复要求的结果;③保证整车CPU I/O卡执行相关指令;④检验车辆前后输入一致性并按要求显示错误帧;⑤主板卡自诊断内部故障并在CAN上指示故障。
I/O模块内有微处理器设备直接与串行线路连接,每个车辆模块内有1个I/O机架,用来固定I/O模块和CPU I/O卡。
CAN C主要为CAN提供如下连接:监视轮胎的胎压检测接收器、DCU、牵引电池管理模块和CAN A或CAN B的快速切换功能。
3.2 基于SIL—3标准的安全板卡类监视系统
Translohr电车中涉及电车安全性的信息由安全卡来监控,因此,安全板卡也是监视系统中的核心组成部分。
安全板卡分为TYPE-123型和TYPE-4型2种,每个电车MP3模块有1个TYPE-123型卡和2个TYPE-4型卡。TYPE-123型监视卡监控内容包括车门、导向装置故障、接地控制故障、乘客报警、刹车气压监测等信息。TYPE-4型监视卡监控内容包括车速信号、警惕按钮、差异继电器、高压盒、紧急转速表、受电弓等的信息。每个安全板卡控制多个安全继电器,这些继电器串联起来组成1个安全环路。电车一侧发送1个电压值到环路,另一端按命令激活刹车单元、受电弓,牵引命令中断。如果安全环路断开,安全制动立即施加。电车出现故障后,司机可用辅助控制面板上的旁路按钮来旁路相应故障,以便于车辆整个系统被破坏前,能自主排空回车辆基地进行维修(见图5)。
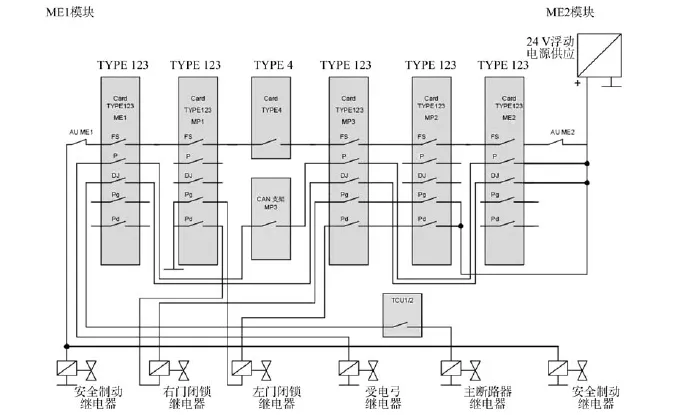
图5 Translohr STE3电车安全板卡类监视系统连接图
4 结语
天津新交通试验线8辆Translohr STE3型电车自投入运行至今,运行总里程近150万km。几年来的运营实践表明,该型电车的电气系统设计合理、稳定。目前,该电车电气系统已由电气故障频发的磨合期逐步转入稳定期,电气故障保持在较低的水平。同时,该电车能借助车载计算机系统实现对故障的快速诊断和维修。该型电车以其鲜明的模块设计、牵引逆变单元的智能控制、计算机网络控制及现场总线等技术的集成应用,为国内有轨电车的设计提供了借鉴和参考。
[1] 高江宁.Translohr有轨电车轨道结构[J].城市轨道交通研究,2012(4):98.
[2] 薛美根,杨立峰,程杰.现代有轨电车主要技术特征及国内外发展研究[J].城市交通,2008,6(6):88.
[3] 杨丹燕.长春70%低地板轻轨车辆电气系统[J].电力机车与城轨车辆,2008,31(6):8.
[4] Lohr Industrie.D00004306-Translohr STE3 Technical Specifications[G].天津:天津滨海快速交通发展有限公司,2006.
[5] Lohr Industrie.D00006530-Translohr Electrical and Pneumatic Energies[G].天津:天津滨海快速交通发展有限公司,2006.
上海松江有轨电车将于今年10月动工
松江有轨电车共规划6条线路,总长90 km,设站118座,可与上海轨道交通9号线、12号线、22号线(金山铁路)换乘。按规划2016年6月示范线将投入试运营,2017年1月示范线正式运营。
(摘自2014年3月17日《上海市综合交通规划研究所网》)
Technical Characteristics of Electrical System of Rubber-tired Translohr Modern Trams
Qian Guangmin
The main technical characteristics of Translohr 100%integral low floor rubber-tired modern trams and the electrical structure for the New Transit Demonstration Line in Tianjin Development Zone are introduced.The technical characteristics of the new trams,including high voltage system,TCU,low voltage system,computer-aided operation system(CAOS)and CAN network bus on Translohr are analyzed in detail,to provide references for the design of Chinese modern trams.
rubber-tired Translohr trams;traction control unit;electrical system
U 482.103
2012-08-24)
猜你喜欢
军民两用技术与产品(2022年6期)2022-08-06
智能建筑电气技术(2022年2期)2022-02-06
公民与法治(2020年22期)2020-12-14
中国电业与能源(2020年7期)2020-08-18
红土地(2019年10期)2019-10-30
廉政瞭望(2018年15期)2018-09-17
乐活老年(2018年1期)2018-01-27
能源(2017年11期)2017-12-13
中国现当代社会文化访谈录(2016年0期)2016-09-26
小天使·五年级语数英综合(2015年6期)2015-07-08