
基于Vires的城市轨道交通线路三维视景建模与应用*
2014-03-23 05:26:04袁海丽王
城市轨道交通研究 2014年4期
袁海丽王 伟
(1.北京交通大学电子信息工程学院,100044,北京;2.北京交通大学轨道交通运行控制系统国家工程研究中心,100044,北京∥第一作者,硕士研究生)
基于Vires的城市轨道交通线路三维视景建模与应用*
袁海丽1王 伟2
(1.北京交通大学电子信息工程学院,100044,北京;2.北京交通大学轨道交通运行控制系统国家工程研究中心,100044,北京∥第一作者,硕士研究生)
三维视景仿真提供生动的视觉场景,可用于无人驾驶系统仿真测试平台的可视化测试,提高测试效率。简要介绍了三维视景仿真,提出三维视景仿真实现的难点之一在于线路模型的生成,建模效率低,且生成的线路模型不可复用。采用Vires工具解决这一问题,并给出线路建模具体实现方案及线路模型调整方法。在此基础上,以北京昌平线为例,实现了昌平线西二旗站至南邵站的三维视景线路建模及仿真。
城市轨道交通;三维视景仿真;线路模型
First-author’s addressSchool of Electronics and Information Engineering,Beijing Jiaotong University,100044,Beijing,China
三维视景仿真系统能真实地反映列车运行速度、位置、状态等重要信息,正确显示列车运行过程中周边环境,并能对列车进行实时控制,以满足轨道交通测试系统高逼真感需要。三维视景仿真的难点之一是线路模型的设计。线路建模的难点和复杂点在于工务数据是不完整或不准确的。如果没有正确的工具或方法处理数据,前期产生的很小问题就会给后期模型生成带来很大麻烦,甚至导致线路模型作废。因此,选择正确的线路建模工具和方法可以提高模型的可维护性,提高建模效率。
1 三维视景仿真
1.1 三维视景仿真简介
三维视景仿真技术是计算机仿真技术的重要分支,是计算机、图形图像处理与生成、多媒体、信息合成、显示等诸多高新技术的综合运用[1]。三维视景仿真系统需模拟实际线路的现场情况,同时,通过与半实物仿真驾驶台的连接控制车体的行进,并显示相关的视景[2]。对地铁无人驾驶系统仿真测试平台的测试需要三维视景提供的视觉及运行信息,以便更加高效及精确地完成测试,发现或解决系统隐含的错误。由此可见,三维视景仿真在无人驾驶系统的实现过程中十分重要。
线路模型在三维视景仿真中简洁完整地表达了地理线路信息,为列车模型的运行和沿线设备的展示提供了运行环境,可用于无人驾驶系统自动化测试。线路模型的建立和仿真是三维视景仿真的重点及难点,本文给出了线路模型设计的改进方法。
1.2 线路建模背景
传统线路建模大多采用Creator或其他与Creator相结合使用的工具[3]。Creator提供了专门的道路建模工具Road。运用Road下的construction tool和tessellation tool可完成铁路线路路径的生成和铺装,逼真地创建包括直线段、缓和线段和坡度段等在内的各种标准道路模型[4]。另外,可以采用Multigen Creator与HintCAD结合的道路地形三维建模方法,首先在HintCAD建立道路地形三维线框模型,数据格式转换为Creator指定的数据格式后,在Creator进行地形模型、道路三维模型的处理和道路三维模型的构建,生成道路模型[5]。但是,传统线路建模工作量大,数据修改不灵活,效率低,且生成的线路模型不可复用。
2 基于Vires的线路建模
Vires是针对铁路领域定制的软件。它可以通过读取指定文件自动生成对应的线路模型,将外部模型(如护栏、隧道等模型)添加到模型库后,在线路模型的基础上导入、修改外部模型,从而生成三维场景。Vires软件不仅可以灵活修改线路数据使生成的线路模型最大程度逼近真实线路状况,还可以修改外部模型属性达到最佳视觉效果。在Vires里可以实现模型的浏览、平移、旋转、缩放等效果。
采用Vires工具建立三维仿真线路模型可以解决传统线路建模的问题。在Vires里生成的线路模型实现了道路与地形之间的无缝结合,在线路模型的基础上导入外部模型(如护栏、隧道等模型)后,Vires能自动将其与线路模型的弯曲度、坡度等属性进行匹配,并且修改灵活,若要使用线路模型,只需在Vires里导入线路数据文件重新生成flt文件即可,复用性强。
3 设计实现方案
为了生成逼真的线路模型,在前期需要搜集线路数据(包括工务数据和电务数据),对数据进行处理,生成txt格式的数据文件。该数据文件作为Vires的输入文件,输出为线路模型文件,线路模型调整的工作在Vires中进行,最后输出线路场景flt文件。线路数据主要包括线路曲线信息、坡度信息和轨旁设备(包含信号机、计轴和应答器等)信息,分别对应于线路文件、坡度文件和标记文件。由于线路数据来自于线路数据库,有误差存在,且Vires在生成线路模型的过程中对线路变化做了自动缓和处理,所以生成的线路模型并不满足实际需求,甚至有线路交叉的问题。为了使生成的线路模型最大限度逼近真实线路状况,需要在Vires中对这3个线路数据文件进行微调处理。实现方案如图1所示。
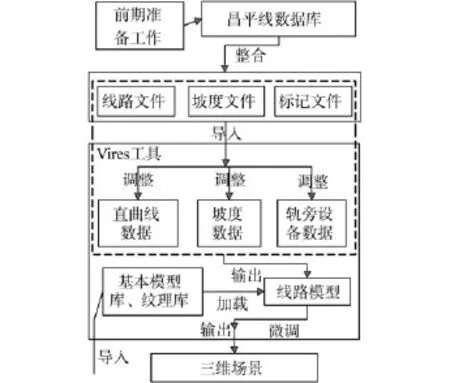
图1 基于Vires工具的线路模型生成方案
3.1 前期准备
本文以北京地铁昌平线为研究对象,昌平线由南向北,一期全程约21.2km,途经西二旗、北清路等7个站,高教园站以北为隧道,高教园站及其以南为地面或高架桥形式。
给线路编号:将西二旗站至城南站、城南站至西二旗站的2条线路规定为主线,分别编号为1、2号线;其它通过道岔连接的线路规定为附属线路(或称侧线)并依次编号,昌平线(除车辆段以外)共有14个线路编号,即有12条侧线。
3.2 模型调整
3.2.1 调整线路文件
整条线路由直线和曲线间隔连接而成,直曲线信息从AutoCAD文件中读取。线路文件以两条主线为基准确定坐标和公里标,文件中的数据列表包括线路号、序号、直(曲)线起点公里标、直(曲)线标志、直(曲)线长度、曲线半径、曲线拐向,以及一些标记信息。每一行的数据代表一段直(曲)线信息,数据之间的对应关系为:

式中:
S——本段直(曲)线所处线路起点公里标,km;
S0——上一段曲(直)线所处线路起点公里标,km;
l0——上一段曲(直)线长度,m。
在每条线路数据最后增加一行数据作为本条线路结束标志,以免与其他线路混淆。
主线与侧线连接必有道岔,见图2。为确保道岔尖轨与基本轨紧贴需要对侧线做缓和处理,在侧线末端增加1段圆弧和直线。图2中若以7号道岔为例,它由1条长3.52 m的直线和1条圆弧组成。弧长一般取44.8 m,曲线半径为800 m,曲线弧度为15°。
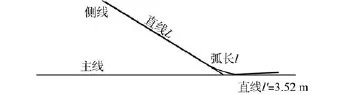
图2 道岔区线路示意
式中:
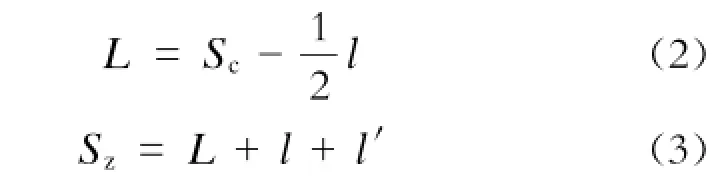
Sc——侧线原有长度,m;
l——圆弧的长度,m;
L——侧线除去缓和段弧线的长度,m;
Sz——包含道岔的侧线长度,m;
l'——侧线末端的直线长度,取3.52 m。
在Vires中需要调整曲线半径和曲线弯曲方向,使整条线路上下行的线间距离满足规定的值(除站台外一般为4.2~5 m之间),如有需要也可以对直线长度做微调。首先调整两条主线间距使之满足条件;其次保证侧线与主线间距满足要求;接下来调整侧线与侧线的间距,最后保证所有的道岔尖轨和基本轨互相搭上,此时需要对道岔处的弧长、曲线半径等数据进行调整,注意直线3.52 m的长度不能改变,否则最后产生的线路将不符合实际线路的特点,达不到仿真的目的。
3.2.2 调整坡度文件
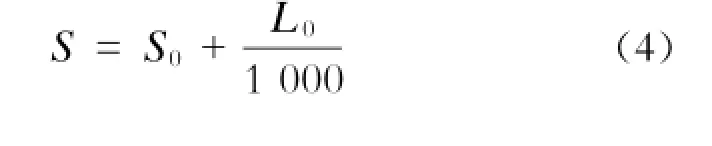
考虑到部分线路位于地面之上,另外有桥梁和隧道等不同状况,加上地形因素,使得整条线路的海拔处于不断变化之中,这就有了坡度的变化。坡度文件数据列表依次包括线路号、序号、坡度起点公里标、坡度值、坡长、线路标高,以及其它标志信息。线路标高即为坡度值对应的坡道起点公里标处的海拔高度。每一行的数据代表一段坡度信息,数据之间有以下对应关系:
如果侧线一端搭在主线上,另一端不含道岔,则做道岔缓和之后的整条侧线长度近似计算方法为:

式中:
S——本段坡度起点所处公里标,km;
S0——上一段坡度起点所处公里标,km;
L0——上一段坡度对应的坡长,m;
H——本段坡度起点所处线路标高,m;
i0——上一段坡道对应的坡度,‰;
H0——上一段坡度起点所处线路标高,m。
在每段坡度数据最后增加一行数据,作为本条线路结束标志,以免与其他线路混淆。
坡度文件的调整主要集中在双线上下行线路是否位于同一水平面这一准则,其误差不能超过0.2 m;单线则按照线路坡度要求处理。对坡度进行微调处理,首先调整2条主线坡度使之满足条件;其次根据主线坡度调整侧线坡度;接下来确保次侧线坡度满足要求。在调整侧线之前,要保证侧线与主线的道岔处于同一水平面。道岔尖轨和基本轨、2条线构成的辙叉心要严格处于同一平面,误差不能超过0.01 m,否则最后生成的道岔将不符合实际要求。
3.2.3 调整标记文件
标记文件包括信号机、应答器和计轴器的标记信息。信号机标记用于指示信号机的开口方向和所处线路位置等。应答器和计轴器标记用于指示应答器和计轴器所处线路位置。在Vires中调整这些设备的公里标和坐标等属性,使之处于线路适当的位置即可。
3.3 问题及解决方案
线路模型的调整是一项比较繁复的工作,为尽量减少调整模型的工作量,在生成模型之前对数据文件进行整合是有必要的。对线路属性相同或数值相似的数据进行合并,可以尽量减少Vires缓和处理,大大降低调整模型的难度和工作量。
调整线路文件需要按照一定的顺序进行,在实践中摸索出一定的规律,既可降低错误率,又可提高效率,给后期模型加载提供充分的有效空间。
从前期准备到线路模型调整的线路模型设计步骤如图3所示。
4 仿真结果
本文建立了北京地铁昌平线西二旗站至南邵站的部分线路模型,如图4所示。Vires主窗口展示了昌平线的平面信息,线路左边为西二旗方向,右边为南邵方向;每条直线有唯一的ID号,代表一条线路,当前选中的是ID号为2的线路,即2号线。从图中可以看到线路弯曲方向;下面的子窗口给出了线路纵切面信息,可以很清楚看到全线对应的坡度起伏,最后一段线路很明显下沉到地面以下,即为隧道部分;点亮Vires工具里的‘signal’标识,轨旁设备就被“安置”在了线路上,道岔处有2个应答器和1个计轴器,信号机开口方向指示从南邵到西二旗的方向。
在整个三维环境中,根据线路公里标、直曲线信息、坡度信息及道岔所处公里标等可以确定列车在环境中的坐标,为后期三维视景驱动提供参数,以达到方便和精确控制的效果。
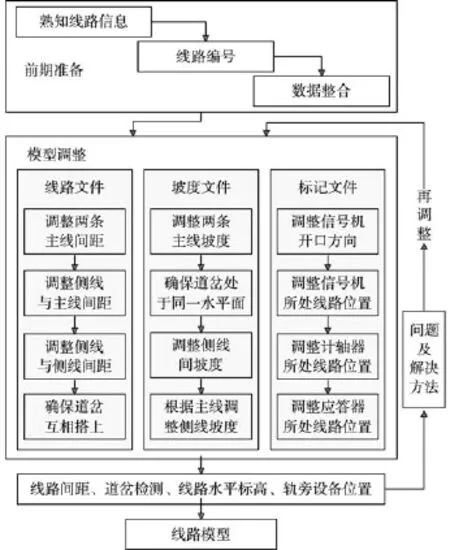
图3 线路建模步骤
5 结语
本文简要介绍了城市轨道交通三维视景仿真在无人驾驶系统中所产生的重要作用,给出三维仿真系统实现方案;提出基于Vires工具的三维视景线路建模方案,解决了三维视景仿真线路建模的难点;通过线路数据处理建立了线路模型,并在北京昌平线上得以实现。
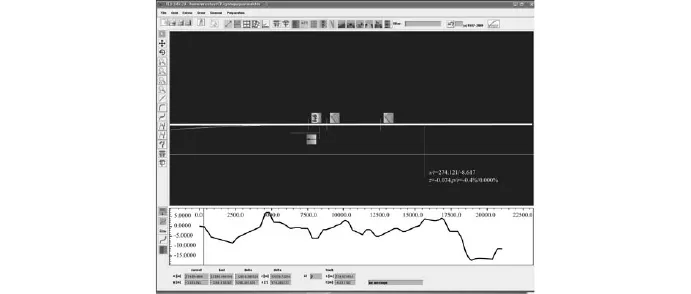
图4 线路模型
但是,采用Vires工具生成线路模型也有不足之处:前期数据量大,容易产生错误,而一个小错误可能导致后面的工作无效;对数据的变化比较“敏感”,容易出现牵一发而动全身的现象。这些问题在三维视景线路建模中有待提高。
[1] 吴家铸,党岗,刘华峰,等.视景仿真技术及应用[M].西安:西安电子科技大学出版社,2001.
[2] 王丹.CBTC系统的自动化测试[D].北京:北京交通大学自动化系,2010.
[3] 刘博,徐元铭,史红伟.基于Creator的列车运行三维建模技术研究[J].科学技术与工程,2010,30(10):7545.
[4] 徐恩,李学军,邹红霞,等.基于Creator/VP的三维虚拟环境建模[J].系统仿真学报,2009,21(1):121.
[5] 张志清,梁昌征,马骁,等.Multigen Creator与HintCAD结合的道路地形三维建模[J].交通信息与安全,2009,3(27):145.
Application of Line Model Design of 3D Video Simulation Based on Vires Tool
Yuan Haili,Wang Wei
Vivid visual scene provided by 3D model simulation is applied to visualization tests on fully automatic operation system,it can improve the testing efficiency.In this paper,3D video simulation is briefly introduced,and one of the the difficulties on simulation——the low efficiency of line modeling and the one-off usage line model are pointed out.But this problem could be solved by Vires tool,which provides an adjustment method for the implementation of line modeling.On this basis,Beijing subway Changping Line is taken as the background,3D video simulation is implemented and has achieves satisfactory result.
urban rail transit;3D video simulation;line model
TP 391.92
2012-09-18)
*国家“八六三”高技术研究发展计划项目(2011AA110502)
猜你喜欢
铁道通信信号(2020年10期)2020-02-07 01:01:02
铁道通信信号(2019年3期)2019-04-25 03:00:40
铁道通信信号(2018年10期)2018-12-06 09:34:48
电子测试(2018年4期)2018-05-09 07:28:19
铁道通信信号(2016年7期)2016-06-06 02:21:02
小学阅读指南·低年级版(2016年8期)2016-05-14 13:24:45
舰船科学技术(2015年8期)2015-02-27 15:38:41
凿岩机械气动工具(2014年3期)2014-03-01 04:00:07
振动、测试与诊断(2014年4期)2014-03-01 01:14:11
铁道标准设计(2012年5期)2012-11-27 03:20:32
