人工心脏差分涡流位移传感器的性能测试装置*
2012-12-07 06:05谈雪丹尹成科马云善张亦柯
传感器与微系统 2012年5期
谈雪丹,尹成科,2,陈 琛,2,马云善,张亦柯
(1.苏州同心医疗器械有限公司,江苏苏州215123;2.苏州大学人工心脏研究所,江苏 苏州215021)
0 引言
由于心脏供体的缺乏,人工心脏已逐渐成为挽救终末期心力衰竭患者的重要手段,降低因等待心脏移植而导致的死亡率[1]。第三代人工心脏由于采用悬浮技术[2],不存在轴承磨损问题,具有使用耐久性高、溶血少、血栓发生率较低[3]等特点,近年来得到了快速发展。国内人工心脏研究也取得了许多进展,研制成功了人工心脏样机[4]。
涡流位移传感器装置是人工心脏的核心部件之一,其检测灵敏度与线性度直接影响到人工心脏磁悬浮系统的控制精度。因此,准确进行传感器性能测试,掌握传感器实际工作特性,对提高人工心脏的可靠性与稳定性有着重要意义。
已有的涡流位移传感器性能测试装置与方法中,多采用扁平圆盘作为测试靶板,进行单一测量方向上传感器的性能测试[5~8]。对于具有二自由度和多于二自由度的多传感器结构,上述装置只能分别针对各方向,多次安装并测试传感器。这种操作可能引入安装上的误差,降低整个传感器性能测试的精度。
第三代人工心脏采用了磁悬浮轴承技术,利用2路差分式涡流传感器探头测量转子位置,从而进行二自由度位移主动控制。传感器探头位于环形转子的内环中心处,即测试靶板为环形封闭结构,需进行二自由度测量方向的性能测试,为此,本文设计了一种基于正交坐标系的性能测试装置,可以实现二自由度的涡流位移传感器精确性能测试。
1 涡流传感器基本原理
涡流传感器主要包括传感器线圈、前置器和被测金属导体组成,利用电磁感应原理与涡流效应原理进行探测传感器与导体之间的间隙。如图1所示,由前置器产生的高频电流激励探头端部的传感器线圈时,会在线圈中产生磁场Φ1。根据电磁感应原理,当金属导体在Φ1的有效范围内运动时,导体会产生涡流,涡流将产生一个阻碍原磁场Φ1变化的涡流磁场Φ2,从而使得传感器线圈的等效阻抗发生改变。线圈阻抗的变化与金属导体的电阻率、导磁率、厚度以及线圈与金属导体的间隙等参数有关。因此,若保持其余参数恒定,线圈与导体间的间隙变化量仅与线圈阻抗的变化量有关,从而将位移量转换成可测量的电信号。
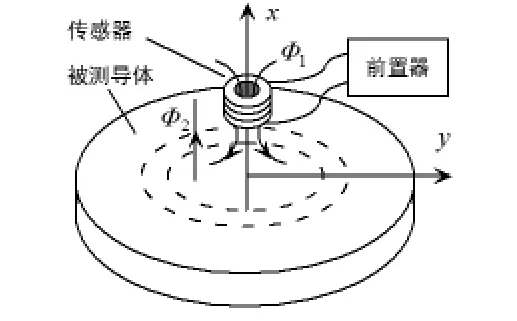
图1 涡流传感器原理Fig 1 Principle of eddy current sensor
2 人工心脏传感器结构与工作机理
人工心脏差分式涡流位移传感器结构如图2所示。
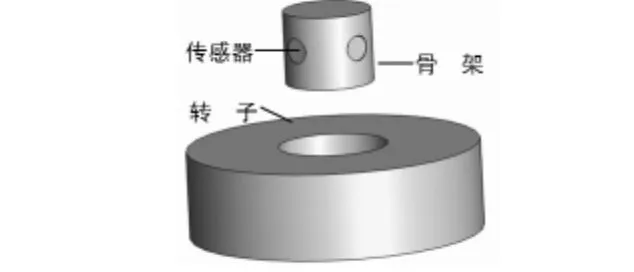
图2 人工心脏传感器结构Fig 2 Sensor structure of artificial heart
图2中,4只涡流传感器均是由漆包线绕制而成的扁平圆线圈,固定在不导电的非磁性材料骨架上,构成传感器探头并固定于定子上。在盘状转子的径向面建立正交坐标系,转子内环中心点为坐标原点,则4只传感器线圈分别位于x,y两轴正负4个方向上,且同一自由度的2只传感器串联。由于采用磁悬浮技术,无需机械轴承,转子可采用中空环形结构。传感器探头位于环形转子内环中心处,当转子相对于定子发生位移时,传感器线圈与转子的相对间隙也随之发生变化,从而引起传感器线圈阻抗的变化。
以人工心脏径向x轴为例,其传感器等效电路如图3所示。
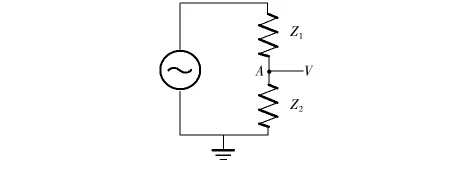
图3 差分式传感器等效电路图Fig 3 Equivalent circuit of differential sensors
当转子靠近线圈1时,同时也远离位于同轴相反方向的线圈2。根据涡流效应可知,此时线圈1的等效阻抗Z1实部增大,虚部减小,线圈2的等效阻抗Z2变化刚好相反。传感器线圈阻抗变化引起图中A点电压V的变化,即实现位移—阻抗—电压的变换。V变化值再经过放大、检波、滤波调整后,用来控制该方向的位移。
人工心脏涡流位移传感器采用差分结构,可以抵消传感线圈的非线性影响,同时有助于消除由于电源电压、频率和环境温度变化引起的传感器自身误差,提高了磁悬浮系统的性能。
3 传感器性能测试装置
如图4所示,性能测试装置主要由可调节支架、微位移机构、千分尺手轮及FRA 5097阻抗分析仪组成。转子夹持在固定的性能测试装置的台架上,待测试的差分式涡流位移传感器探头安装在微位移机构上。装置设有2个相互正交的千分尺手轮,分别表征坐标系的x轴与y轴。
性能测试时,首先对被夹持的转子进行调整,使得传感器探头位于转子内环适当位置。然后保持转子不动,缓慢转动千分尺手轮,带动传感器探头产生径向(x轴、y轴)的微小位移,涡流传感器阻抗也随之变化,位移量大小与阻抗变化量分别由手轮上的刻度与阻抗分析仪读出。
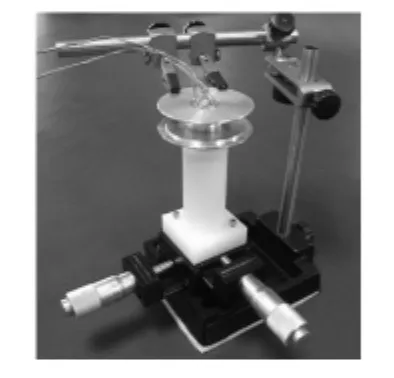
图4 涡流传感器性能测试装置Fig 4 Performance testing device of eddy current sensor
4 性能测试与结果分析
人工心脏对转子进行二自由度位移控制,每个自由度的传感器探头测量范围设计值均为±0.5 mm。对2个自由度分别进行传感器性能测试:首先将传感器探头调至某自由度的负端,此时,该自由度的2个传感器阻抗差值最大,而另一自由度阻抗差值最小;然后每个自由度均按正反2个行程,每隔0.05 mm移动一次传感器探头,测量并记录该自由度的传感器阻抗数据。
将实验数据进行最小二乘法线拟合处理,获得传感器灵敏度与线性度。以一组x轴正反行程的实验数据为例,2个传感器线圈归一化阻抗与位移量数据如图5(a),(b)所示,从图5中可以看出:当传感器探头与转子相对间隙发生变化时,处于同一自由度相反方向的2个线圈阻抗变化趋势是相反的。
首先计算单行程的差分涡流传感器阻抗变化量,然后利用正反行程的阻抗变化均值与转子位移量进行线性拟合,得到转子位移量Δx与差分涡流位移传感器的阻抗变化量Δz的输入—输出特性。传感器探头测量范围设计值为±0.5 mm,然而实际工作中,转子发生±0.5 mm的位移时磁悬浮已经失效,因此,考察±0.25 mm内的传感器灵敏度与线性度即可,见式(1),其拟合直线如图6所示。
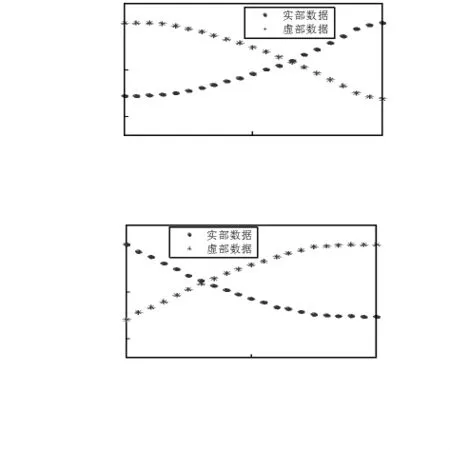
图5 x轴涡流传感器阻抗数据Fig 5 Impedance data of x-axis eddy current sensor

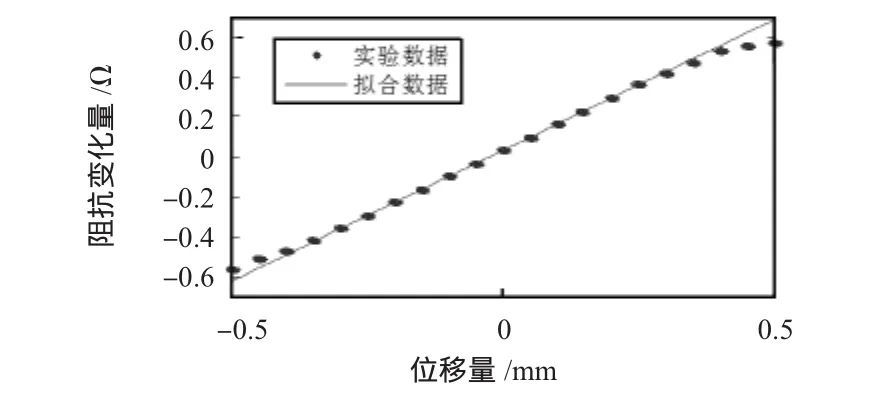
图6 差分涡流传感器位移—阻抗特性Fig 6 Displacement-impedance property of differential eddy current sensor
图6中,该方向差分涡流传感器在±0.25mm内的灵敏度为1.3142Ω/mm,性能良好,可以满足人工心脏磁悬浮系统的控制精度要求。对比图5与图6,可以看出:该自由度差分特性的线性度明显优于单个传感器线圈的检测线性度,经计算该差分传感器在±0.25 mm内的线性度[8]为0.49%,阻抗变化与位移量基本呈线性关系,可以用于探测磁悬浮转子的位置。
5 结论
本文根据人工心脏磁悬浮技术特点,针对现有涡流传感器性能测试装置的不足,研制开发了一种正交坐标系的测试装置,完成了差分式位移涡流传感器二自由度的精确测试,为进一步提高人工心脏磁悬浮控制性能提供了可靠依据。
[1]Timms D.A review of clinical ventricular assist devices[J].Medical Engineering & Physics,2011,22(9):1041-1047.
[2]Hideo H,Shinshi T,Takatani S.Third-generation blood pumps with mechanical noncontact magnetic bearings[J].Artificial Organs,2006,30(5):324-338.
[3]郭龙辉,张杰民,刘晓程.第三代血泵的研究进展[J].中国胸心血管外科临床杂志,2010,17(4):321-325.
[4]张文礼,冯 峰.海归博士领衔创业中国“人工心脏”跻身世界前列[J].中国机电工业,2010(8):118-120.
[5]李 博,翁 莹,佟海云.电涡流传感器在汽轮发电机组的应用及标定[J].包钢科技,2005,31(5):36-38.
[6]王天娜.电涡流传感器自动静标定系统与实验研究[D].北京:北京化工大学,2008.
[7]丁美莹.位移传感器的静态自动标定与实验研究[D].北京:北京化工大学,2010.
[8]徐 龙,陈良洲,文 丹.结合LabVIEW的电涡流传感器研制及标定[J].实验室研究与探索,2011,30(2):9-11.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-23
新传奇(2022年6期)2022-02-22
小学科学(学生版)(2021年4期)2021-07-23
装备制造技术(2020年11期)2021-01-26
自我保健(2019年11期)2020-01-09
通信电源技术(2018年5期)2018-08-23
科学导报(2018年17期)2018-05-14
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
中国新闻周刊(2017年28期)2017-08-12