基于CAN总线和巨磁阻的汽车踏板角度传感器研究
2012-11-28 03:42:24孟黎明杨胜兵
湖北汽车工业学院学报 2012年1期
孟黎明,杨胜兵
(武汉理工大学汽车工程学院,湖北武汉430070)
随着能源和环境问题的日益突出,人们对汽车性能的要求不断提高,越来越多的汽车使用了电子油门控制系统。电子油门控制系统摒弃了传统油门踏板采用钢丝绳或杠杆机构与发动机节气门间的直接机械连接,通过增加相应的传感器和电控单元,来感知驾驶员的操作,将信号传递给发动机电子控制单元(Electronic Control Unit,ECU),对节气门开度进行实时精确控制,有助于提高汽车行驶的动力性、平稳性和经济性,降低排放污染[1]。在电子油门系统中,油门踏板负责传递驾驶员意图,通过角度传感器采集踏板转角的变化量,转换成相应的控制信号,传递给发动机ECU。
1 角度传感器结构和原理
电子油门控制系统由油门踏板、ECU和电控节气门组成,其结构图如图1所示。

图1 电子油门系统组成图
电子油门踏板采集驾驶员操作信号送入发动机ECU,发动机ECU结合主控ECU信息,通过相应算法得出节气门开度并驱动节气门电机转过一定角度,通过节气门角度传感器将信号反馈给ECU,形成闭环控制。这样可以通过模拟机械式油门系统驾驶过程,实现驾驶员操作意图。
在电子油门踏板中,角度传感器是关键部件,承担着踏板瞬时转角的采集和信号传递,对可靠性、性能、使用寿命等都有严格要求。传统的角度传感器基于多种原理,如电阻分压效应、光电效应、霍尔效应等、这些传感器普遍存在测量精度不高、抗干扰性差、成本高等缺点。相比之下,采用英飞凌推出的巨磁阻抗技术GMR(Giant Magneto Resistance)芯片TLE5011做为角度采集芯片能很好的克服以上不足,结合主控MCU可以实现在系统编程,进行各种优化和运算,并可以任意更改量程,其结构图如图2所示。
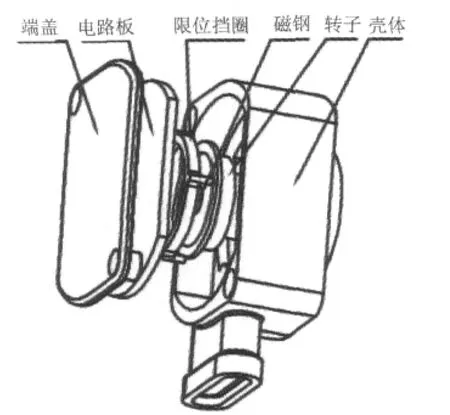
图2 GMR角度传感器结构图
2 巨磁阻芯片TLE5011应用
2.1 英飞凌TLE5011介绍
在传感器中,TLE5011用来采集磁钢的转角。TLE5011集成了2个GMR全桥,1个温度传感器,2个A/D转换器,几个稳压器,额外的滤波器和用于持续监测这些器件运行的内部机制,提供了2个数字角度分量:代表正弦分量的X和代表余弦分量的Y。其内部结构如图3所示。
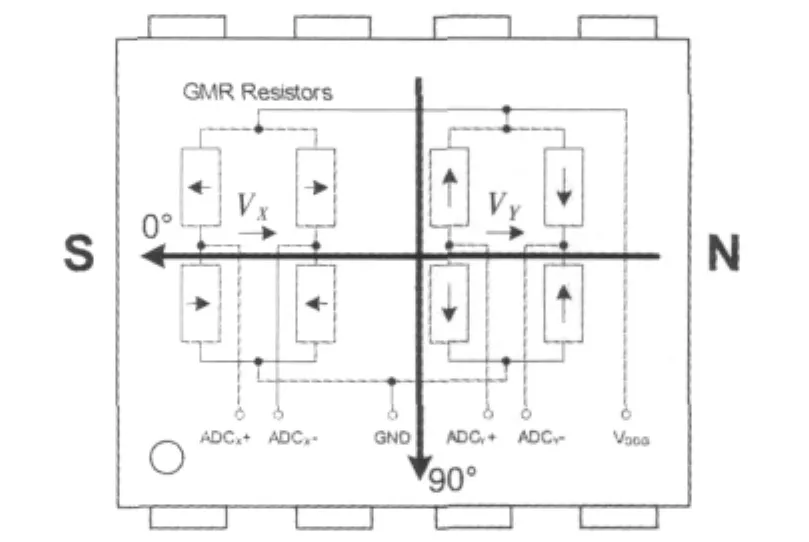
图3 TLE5011传感器内部结构原理图
通过SPI接口将传感器连接到8位MCU,可以计算精确的角度信号。在传感器和MCU之间传输数字型数据意味着降低了易感性干扰,且用于补偿的集成温度传感器确保在-40°~+150°广泛的温度范围内具有高精确角度,测量角度为180°。踏板转动时,传感器内的转子随之转动,从而带动GMR芯片上方的磁钢转动。TLE5011中的巨磁电阻感应磁场方向的变化,从而产生磁场位置角度信号,如图4所示。
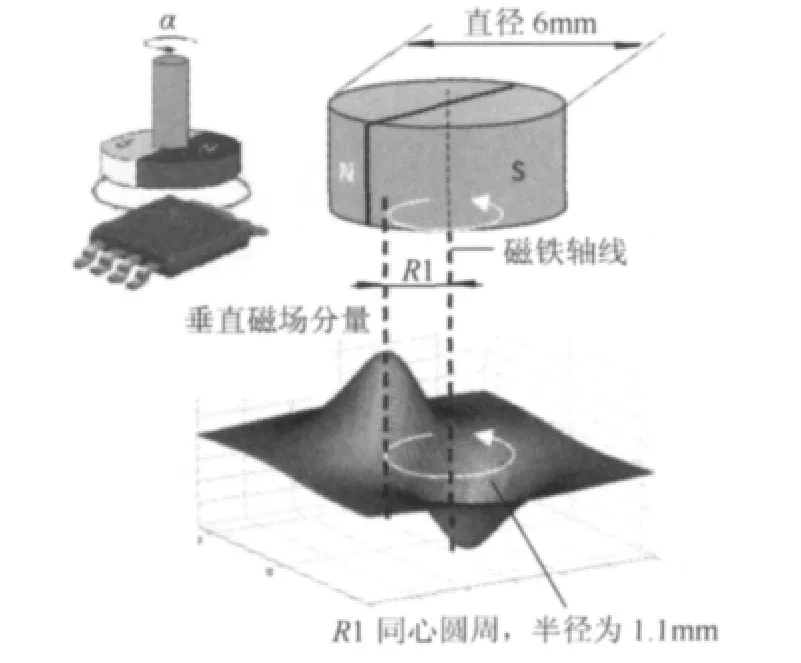
图4 磁钢和芯片的位置及磁场分布图
2.2 角度计算
TEL5011采集到的是XY值,角度值用反正切函数计算得出,为了提高精度,还需进行以下处理。这样在一定的磁场作用下TLE5011的2个惠通斯感应桥分别输出与磁场方位角度有关的量:X、Y。它们与磁场相对于芯片的角度成一定的函数关系。
由芯片手册得到:

式中:AX为X(=cos)信号的振幅;AY为Y(=sin)信号的振幅;OX为X(=cos)信号的偏移补偿;OY为Y(=sin)信号的偏移补偿;φX为X(=cos)信号的相位误差;φY为Y(=sin)信号的相位误差;α为磁钢的磁场方位角度值。以上参数在磁钢和芯片相对位置固定后,均可测出。
1)偏移修正
读出X、Y值后,进行温度补偿。

2)振幅标准化
用校准决定的峰值使X、Y值标准化。

3)非正交修正
非正交的影响可以通过式(4)得到补偿,只需要对Y通道进行修正。
通过完善施工环境污染管理制度,落实相关责任,加强对相关施工人员的环保意识培养,全面提升其综合素养,才能保证上述扬尘污染的管控措施得到有效的落实,从而取得更好的防治效果,改善大气环境质量。

在修正所有误差后,角度结果用反正切函数计算,直接由X2、Y3得到

3 电路硬件设计
电路中,需要采用集成芯片TLE5011感应磁钢转动时的磁场变化,并将该变化转化成踏板转角,硬件电路需要完成的任务即捕获磁场的转动量、将该转动量转化成相应的踏板行程值。本文选择TLE5011和PIC18F2480实现上述功能。
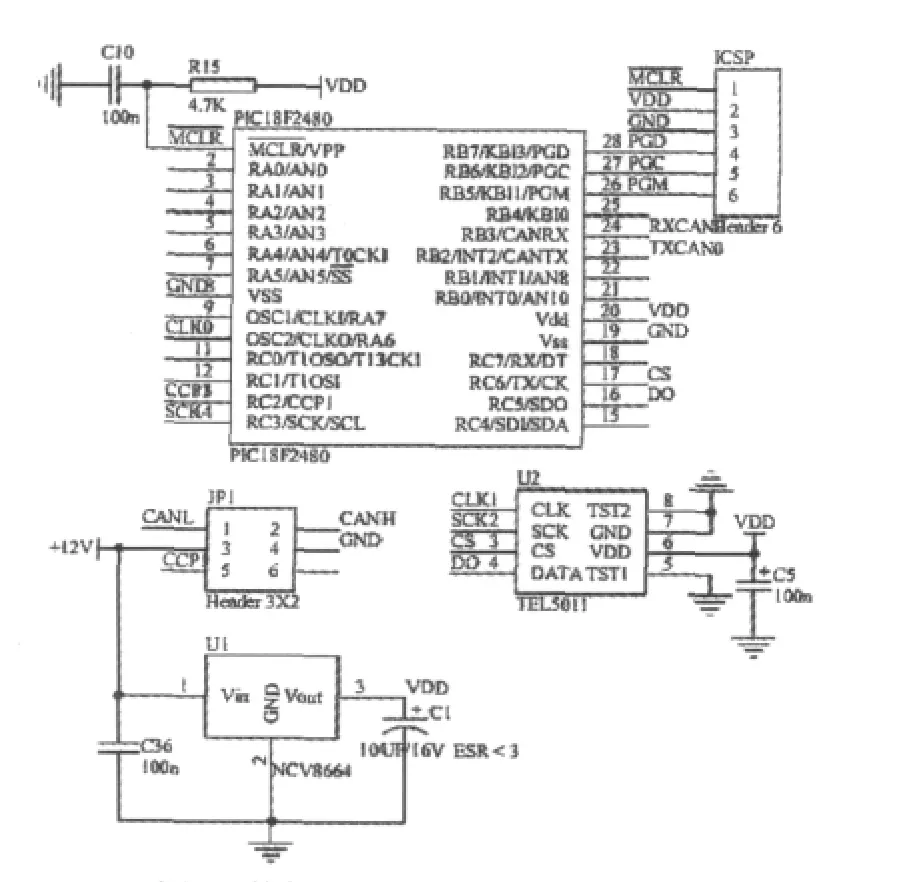
图5 数据采集处理部分的电路图

图6 CAN总线接口电路
PIC18F2480是Microchip公司的16位单片机,自带的功能很丰富。在该系统中主要利用单片机上的SPI模块和TLE5011进行数据传输,PWM模块通过滤波电路输出模拟电压,通过CAN总线模块和其他模块进行通信。电路图如图5~6所示,单片机以主机身份通过SPI接口接收TLE5011传递的数据,并转换成相应的油门踏板角度值。通过CAN总线和发动机ECU进行通信,将数据传递给ECU。为了满足现阶段的通用性,还可以选择通过CCP1引脚输出PWM,经阻容滤波后输出模拟电压信号,和现阶段的角度传感器技术可以兼容。
4 软件设计
4.1 系统流程图
系统软件主要包括初始化端口配置,读预置的FLASH数据,TLE5011数据转换,CAN总线数据传输以及传感器置零模块组成,系统流程见图7。
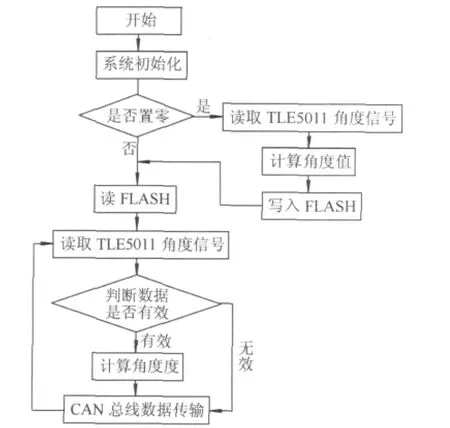
图7 系统流程图
4.2 反正切的CORDIC算法
CORDIC算法 (coordinate rotation digital computing)基本思想是用一系列角度不断偏摆从而逼近所需旋转的角度选取固定旋转角度恰好使得计算只有移位和相加因此使乘法在硬件上得到很好的实现。Cordic算法有2种模式:旋转模式和向量模式。其中,向量模式可以用来求反三角函数。
具体实现过程:将各种可能的旋转角度加以限制,使得对任意角度的旋转能够通过一系列连续小角度的旋转迭代i来完成。旋转角度遵循法则:

于是原始的算法就被简化为使用向量的伪旋转来表示的迭代移位—相加算法(图8),每个迭代需要2次移位,1次查表(θ(i)的值)和3次加法。
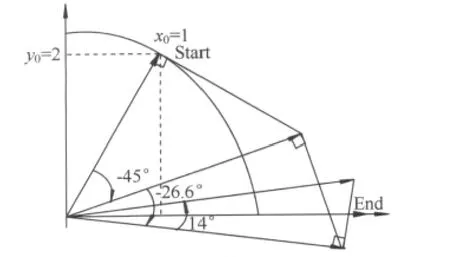
图8 迭代过程图示
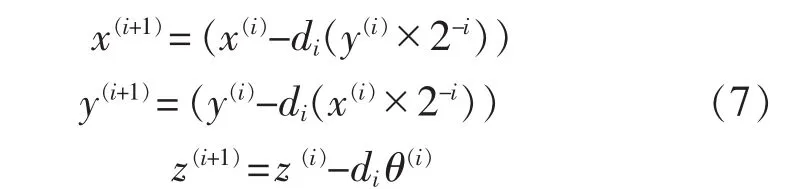
在向量模式中选择:

经过n次迭代后:

于是,当给定 x(0)和y(0)值并令z(0)=0时,就可以计算反正切值。去 x(0)=1和y(0)=2,计算过程如图9所示,表1中给出了前3步迭代过程和最后一步的迭代结果。从表1中可以看出,经过8次迭代后,得到的反正切值精度达到了0.1°,已经符合角度传感器设计指标要求。该算法在PIC18F系列单片机上运算速度快,从而简化了硬件的配置,不需要单片机配置专门的CORDIC模块。
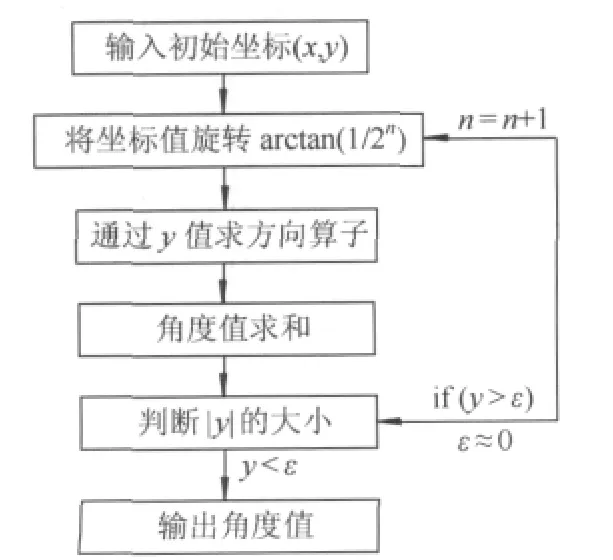
图9 CORDIC算法流程图
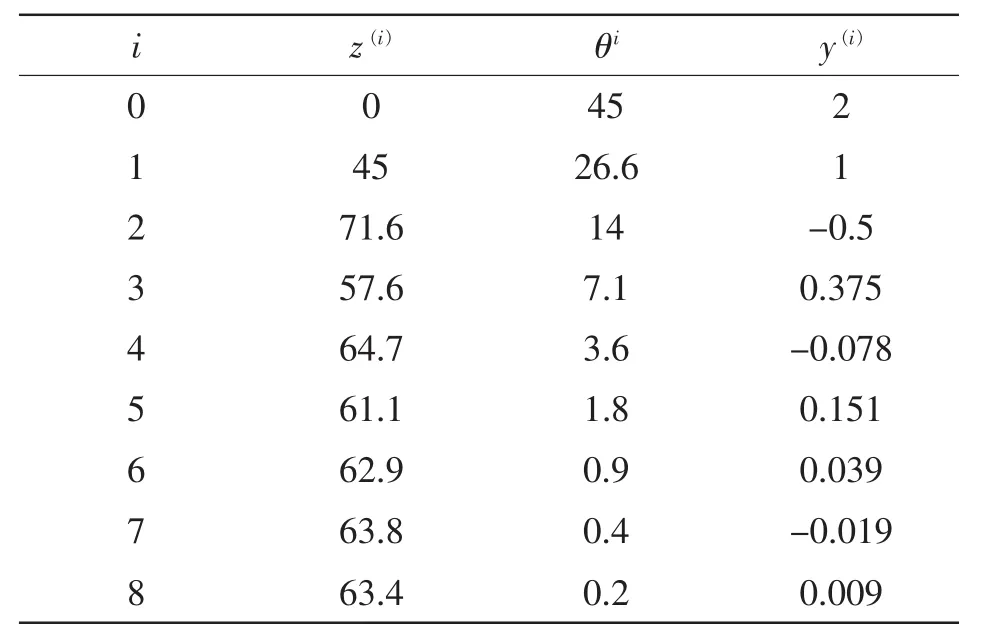
表1 求反正切的迭代过程
5 结 论
基于GMR技术提出了一种全新的电子油门踏板角度传感器设计方案,和目前在用的电子油门踏板相比,该方案有如下特点:
1)采用TLE5011的非接触式角度传感器,具有灵敏度高、测量精确、工作可靠的特点。
2)该方案采用CAN总线和发动机ECU通信,提高了信号传输的精度,并减少了发动机ECU的工作量;同时预留了模拟量输出接口,和现有的产品可以兼容。
3)采用CORDIC算法克服了普通单片机不能进行反三角函数运算的缺点,从而使该设计方案的适用范围更广。
[1]李国峰,王云.基于单片机的汽车电子油门控制器的设计与实现[J].电子技术应用,2009(4):137-140.
[2]秦玉伟.磁阻式角度传感器在电子油门系统的应用[J].仪表技术,2007(4):57-58.
[3]叶飞,马明星.基于HALL元件的电子油门踏板电路的设计开发[J].重庆工学院学报,2008(11):4-7.
[4]陈娟.汽油机电子油门控制系统的设计与试验研究[D].重庆:西南大学,2007.
猜你喜欢
车主之友(2022年6期)2023-01-30 07:58:16
岷峨诗稿(2020年4期)2020-11-18 23:54:01
黄河之声(2019年23期)2019-12-17 19:08:43
汽车实用技术(2019年17期)2019-09-21 03:46:32
汽车维护与修理(2019年3期)2019-08-08 02:29:02
汽车维护与修理(2018年19期)2018-04-28 01:21:40
黄河之声(2017年13期)2017-01-28 13:30:17
汽车维修与保养(2015年1期)2015-04-17 03:25:34
汽车零部件(2014年5期)2014-11-11 12:24:30
发明与创新·小学生(2013年8期)2013-04-29 00:44:03