基于GPRS的混合动力试验台架远程数据采集系统研发
2012-11-28 03:42:32唐艳荣冯能莲郭靖
湖北汽车工业学院学报 2012年1期
唐艳荣,冯能莲,郭靖
(1.安徽农业大学 工学院,安徽合肥230036;2.北京工业大学,北京100022)
数据采集系统是指将温度、压力、电压、电流、位移等模拟量采集、转化为数字量后,由计算机存储、处理、显示或打印的系统[1]。而在实际应用中,往往由于煤田、矿井等恶劣环境的现场数据或大量分布广泛的现场数据不方便进行现场采集[2],这就需要采用现代远程采集技术来解决。
随着移动通信技术的迅速发展[3],利用无线网络实现远程监控和数据传输被广泛应用于各个领域[4]。作为第2代移动通信向第3代过度的技术[5],GPRS网络比现有的GSM网络有以下优点:实时在线、快速登录、按流量计费、传输速率高、支持IP协议和X.25协议等[5-7]。本文介绍的系统是以GPRS网络为传输网络,飞思卡尔单片机为控制核心,通过各种传感器采集混合动力试验台架的实验数据,经A/D口转化为数字量,再由单片机控制GPRS模块将数据传输到上位机——监控中心。
1 系统结构及功能
基于GPRS技术的远程数据采集系统的总体结构如图1所示。按功能可分为3个部分:上位机、下位机和通信网络。其中上位机是监控中心,下位机用于现场采集数据及控制,而通信网络则是把下位机的数据传输到上位机。

图1 系统总体结构图
1.1 上位机构成与工作原理
为了给用户提供一个可视化的检测界面,上位机采用面向对象的编程软件VB编写的。监测界面由控制模块、实时绘制曲线模块,数据接收显示模块、数据保存模块和GPRS通信模块5个部分组成。其工作原理是:创建一个服务器Socket类,设置其LocalPort属性,使其作为侦听端口;然后使用Listen方法进入侦听状态,等待客户机程序的连接请求,若有客户机发出连接请求,服务器程序则产生ConnectionRequest事件;连接成功后,服务程序用Accept方法接受客户机程序的requestID请求,这样服务程序就可以用SendData方法发送数据;当服务程序接收到数据时,产生DataArrival事件,用GetData方法接受数据。接收到的数据经过TCP/IP包解析处理后用iplotx控件进行实时曲线绘制,使用Text控件显示,List控件进行保存。用Socket控件实现GPRS网络通信必须要将GPRS网络与Internet网络连接,其方法是上位机要在具有一个独立公网IP地址的PC机环境下运行,且上下位机要使用同一种协议。
1.2 下位机工作原理
下位机即现场数据采集系统,是由控制核心、传感器模块、AD转化模块、GPRS模块、PWM波模块组成。其中控制核心为飞思卡尔DG128单片机,本身带有AD模块、PWM模块、232串口通信模块等。AD模块有8路,可以同时转换8路信号,PWM模块也可以同时产生8路PWM波信号。
由于本系统中同时采集2路信号,故有2路传感器:一路采集电压信号;另一路采集位移信号。传感器模块把采集到的模拟信号经过处理后送到单片机的AD口,AD模块把模拟信号经采样、量化等处理转化成数字信号,然后由单片机处理并通过串口把信号传送到GPRS模块,再由GPRS模块发送到上位机;GPRS模块也可以收到上位机发送的控制信号,然后传递到单片机,单片机根据控制信号命令产生相应的PWM波,从而控制被控对象。
1.3 通信网络
GPRS通信模块负责在上位机与下位机之间建立无线数据传输通道。一方面把下位机采集的数据封装成TCP/IP包通过网络传送到上位机;另一方面把从网络中接收的来自上位机的TCP/IP包解析成相应的二进制数据传送给下位机。本系统采用的是SIM300 GPRS模块,支持TCP/IP协议,提供RS232串行接口,支持标准AT指令。其实现网络传输数据的步骤如下:
1)AT 检查GPRS模块是否可用,若回应OK,则模块可用,否则模块不可用;
2)AT+CCID 检测是否装有SIM卡;
3)AT+CQMR 检测软件版本,5.0以上的才有GPRS功能支持;
4)AT+CSQ 检测信号质量,确定是否可登上网络,若返回(10~31,0)的信号数字则继续,如果信号是(99,99)则应该考虑不停的让模块搜寻网络;
5)AT+CGCLASS="B" 设置模块工作类型;6)AT+CGATT=1 激活 PDP,获得 IP;
7)AT+CIPSTART = "TCP","211.71.95.192","2000" 网络连接,设置TCP协议,IP地址和端口;
8)AT+CIPSEND 若返回“>”,则输入要传输的数据,再发送“CTRL+Z”,即将所要发送的数据发送到指定IP的服务器上,否则不能发送数据;
9)AT+CIPCLOSE 断开网络连接,此命令只有在TCP/UDP处于CONNECT OK的状态下才返回OK,否则返回ERROR。
在运行GPRS网络传输数据的过程中,以上AT指令必须设置,且相邻指令间须有延时,否则GPRS模块无法正常工作。
2 系统软件设计
整个远程数据采集系统的软件实现主要包括上位机监控中心和下位机单片机控制的数据采集设备的软件设计。其中上位机监控中心软件设计主要是显示客户端IP地址、端口号、数据显示、存储、实时绘制曲线以及与下位机进行通信和远程控制;下位机以飞思卡尔DG128单片机为核心,辅助外围设备,主要负责各个功能模块的调度。在软件设计过程中,上位机和下位机的通信协议是TCP/IP协议,这是因为TCP/IP协议可以直接与Internet互通;其次TCP协议是基于连接的协议,在传输的过程中一旦发现问题就会发出信号,要求重新传输,知道所有数据安全正确的传输到目的地;再次TCP协议的数据格式是“TCP头部+实际数据”,TCP数据头包括源和目标主机端口号、顺序号、确认号、校验字等,这样可以提高数据传输的效率以及减少误码、丢失数据等的情况。主程序结构如图2所示。主程序初始化后进入循环状态,有数据传输过来时执行中断,对数据进行处理,然后执行相应的操作,否则一直处于等待状态,直到有新的数据要接收。
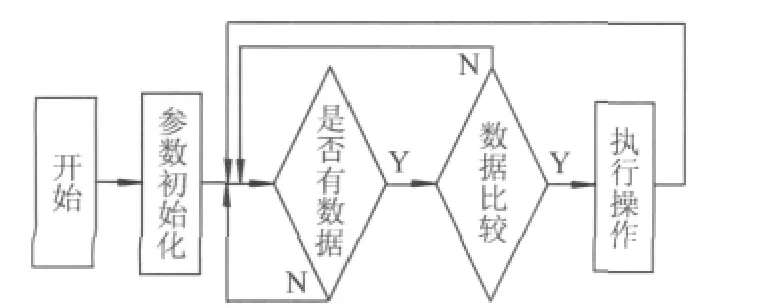
图2 主程序结构图
3 试验结果与分析
本次试验以混合动力试验台架为被控对象,采集的主要参数是其台架上电机的转速和转矩。图3~4分别是试验前、后上位机界面图。

图3 试验前上位机界面

图4 试验中上位机界面
比较图3与图4可看出,当GPRS通信连接后,上位机和下位机便可通信,图4中显示的客户端IP即下位机的IP地址。下位机有数据传输时,上位机便可以在文本框中显示出传输数据,且在列表框中也可显示,还可保存,同时接收到的数据也可被实时绘制成曲线并加以保存。从图4中曲线变化可看出转速和转矩的变化情况,当上位机一直操作加速这一动作,电机就会一直加速,当上位机不进行操作,电机则保持当前的速度匀速转动。
4 结 论
本文主要以公共无线广域网络作为载体,将远程环境采集到实时数据,通过无线GPRS模块传送到控制中心,实现远程监控及实现数据管理。系统运行稳定可靠,克服了传统环境监测系统存在的问题,满足了对环境监测的要求。这一系统只要稍作改动,就可应用于电力抄表、农业生产监测、交通状况监测、矿井监测等领域,应用前景广泛。
[1]薛家驹.基于GPRS的远程数据采集系统[D].杭州:杭州电子科技大学,2006.
[2]吴叶兰,廉小亲,张晓力,等.一种基于GPRS的无线数据采集终端设计[J].微计算机信息,2010,(20):55-57.
[3]蒋学程,赵国良.单片机数据无线传输[J].应用科技,2005,(4):28-30.
[4]侯婷,杨洪业,李俊芬,等.GPRS无线数据传输终端的设 计和实 现[J].微 计 算 机 信 息,2006(23):287-289,159.
[5]韩亚东.基于GPRS技术的无线远程监测系统的研究与设计[D].武汉:武汉理工大学,2009.
[6]郭启军.基于GPRS的无线数据传输系统的研究与设计[D].浙江:浙江师范大学,2009.
[7]逄栋.基于GPRS的无刷直流电机的远程监控系统[D].江苏:江苏大学,2010.
猜你喜欢
军事文摘(2022年20期)2023-01-10 07:18:38
英语文摘(2021年11期)2021-12-31 03:25:18
科技与创新(2018年1期)2018-12-23 06:46:14
学生天地(2018年19期)2018-09-07 07:06:30
车迷(2018年12期)2018-07-26 00:42:22
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
现代工业经济和信息化(2016年2期)2016-05-17 05:34:15
北京纪事(2016年5期)2016-05-07 13:17:02
学习月刊(2015年3期)2015-07-09 03:51:04