
新型全地形车操纵稳定性评价分析
2012-09-18 02:19黄泽好徐文强孙章栋陈卫东
重庆理工大学学报(自然科学) 2012年6期
黄泽好,徐文强,孙章栋,陈卫东
(重庆理工大学 a.汽车零部件制造及检测技术教育部重点实验室;b.重庆汽车学院,重庆 400054)
全地形车(ATV)适合所有地形,机动性强,被广泛应用于农林业、畜牧业等领域[1]。特别在军事应用中ATV不仅要运载战斗人员,而且要搭载武器装备,这就对其行驶稳定性提出了较高要求。国内ATV行业近几年才发展起步,这方面的研究尚不多,相关操纵稳定性评价标准有待制定和完善[2]。
原型ATV实车已进行相关操纵稳定性试验验证。在原型ATV实车的基础上进行设计改进,在CATIA中建立前2轮后1轮的新型ATV三维模型,进而在Adams中建立多体动力学模型,并对新型ATV进行相关操纵稳定性虚拟试验,分析稳态回转响应特性、角阶跃响应特性以及蛇行试验响应特性[3]。参考汽车操纵稳定性评价方法,对其操纵稳定性进行评价。
1 ATV动力学模型
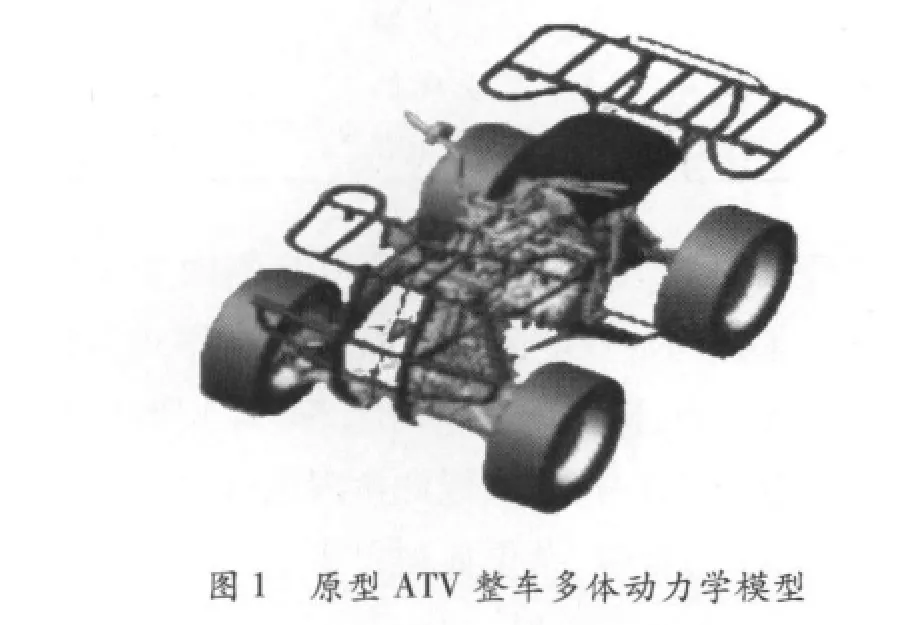
在Adams中建立由车架、发动机、转向机构、悬架、轮胎模型和路面谱等组成的整车模型。原ATV整车多体动力学模型如图1所示,新型ATV整车多体动力学模型如图2所示。使用由Adams软件提供的适合整车操纵稳定性分析的平整路面(Flate)和柔性环轮胎模型(F-Tire)[4-7]。

2 ATV操纵稳定性分析
新型ATV主要进行转向盘角阶跃输入下的稳态响应、瞬态响应以及蛇行试验仿真,并进行比较[8-9]。
2.1 角阶跃输入下的稳态响应
新型ATV的转向特性主要由角阶跃输入下的稳态响应来进行评价。由于新型ATV后轮为链传动驱动,载荷远小于轴传动,要保证新型ATV总的驱动力与原ATV相等,在前后驱动力分配时,前驱动力为后驱动力的4倍。
根据汽车操纵稳定性指标限值与标定方法,按中性转向点的侧向加速值an、不足转向度U、车箱侧倾度Kф等3项指标进行评价计分。
虚拟试验中,在新型ATV方向把上施加30°的转向角(保证ATV转弯时轮胎侧偏角处在线性范围内)并不断加速[3]。方向盘角阶跃输入下的稳态响应运动轨迹如图3所示。
图3 方向盘角阶跃输入下的稳态响应运动轨迹
中性转向点的侧向加速度值an是指前、后桥侧偏角差值与侧向加速度关系曲线上斜率为零处的侧向加速度。如果中性转向点未出现在所测试的侧向加速度范围内,应用最小二乘法按无常数项的三次多项式拟合曲线对an进行推算。中性转向点的侧向速度an可以很容易地由转向半径比R/R0与侧向加速度的关系曲线得到,如图5、7中R/R0为1时对应的侧向加速度即为中性转向点的侧向加速度。中性转向点的侧向加速度评分值由式(1)计算,结果如表1所示。


表1 侧向加速度计分
不足转向度U按前后桥侧偏角差值与侧向加速度关系曲线上侧向加速度值为2 m/s2处的平均斜率(纵坐标值除以横坐标值)计算,如图4、6。评价计分值按式(2)计算,结果如表2所示。
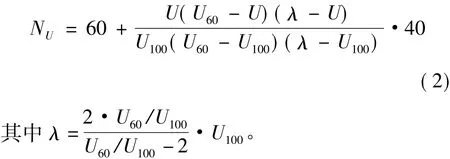
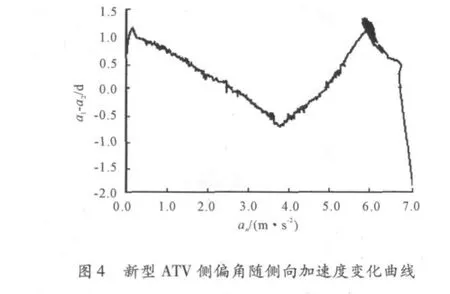

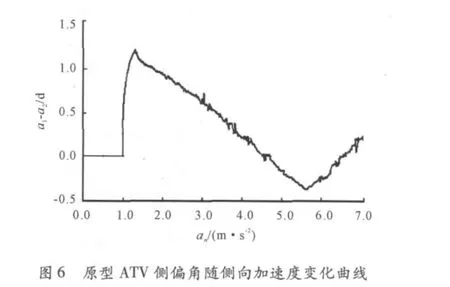
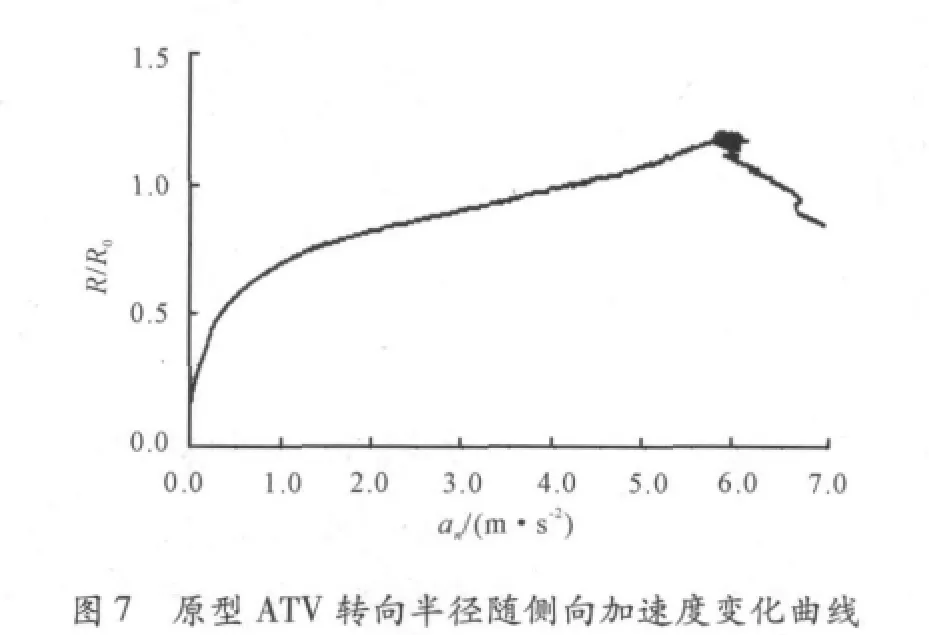

表2 不足转向度计分
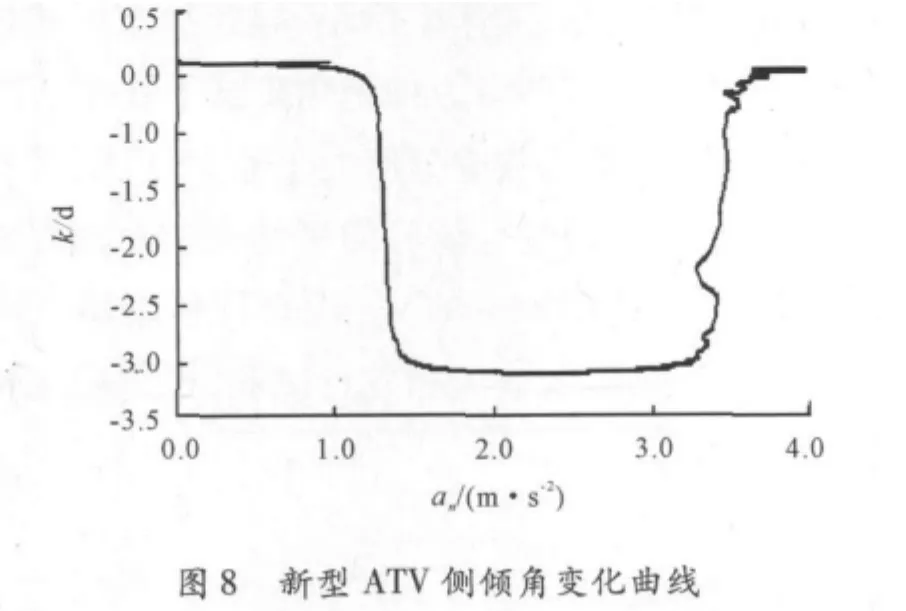
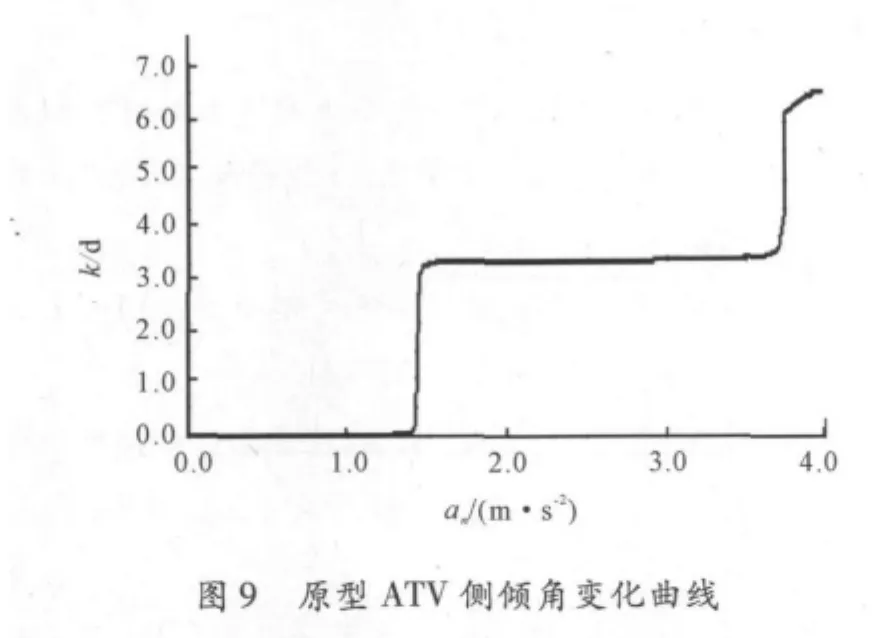
车箱侧倾度K0按车箱侧倾角与侧向加速度关系曲线上侧向加速度值为2 m/s2处的平均斜率计算。如图8、9,新型摩托车为1.54,原型摩托车为1.56,均大于评分限值,因此按限值计算。评价计分值按式(3)计算,结果如表3所示。

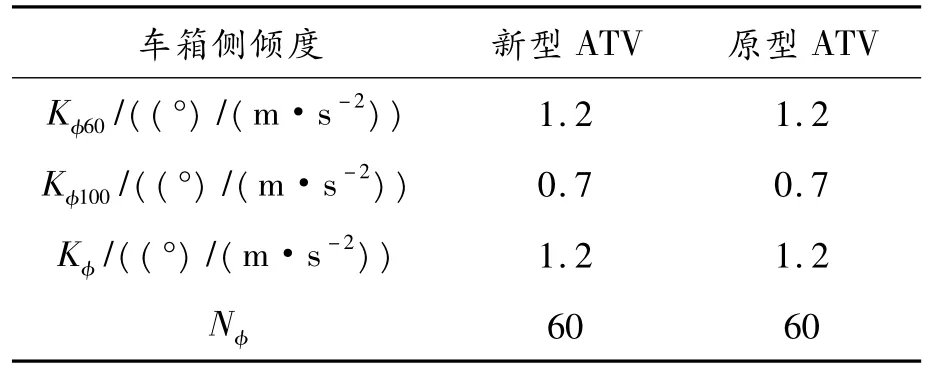
表3 车箱侧倾度计分
ATV稳态回转试验的综合评价计分值按式(4)计算。

ATV稳态回转试验的综合评价分值Nw:新型ATV 为75.7;原型 ATV 为77.0。
2.2 方向盘角阶跃下的瞬态响应
新型ATV的操纵稳定性用转向盘角阶跃输入下的瞬态响应来表征。仿真试验中ATV先匀速直线行驶,在t=10 s时,将方向把急速转动至15°保证ATV轮胎侧偏角处在线性范围内,并保证方向把转角不变,测量ATV质心横摆角速度和侧向加速度的瞬态响应[10-11],如图 10所示。原型 ATV在相同条件下仿真并与新型ATV进行比较。瞬态响应下的横摆角速度如图11所示。
图10 角阶跃输入下的瞬态响应

图11 瞬态响应下的横摆角速度
根据汽车操纵稳定性指标限值与评价法得到响应评价指标数据,将侧向加速度值为2 m/s2时的汽车横摆角速度响应时间T作为角阶跃评价指标。评价计分值按式(5)计算,结果如表4所示。

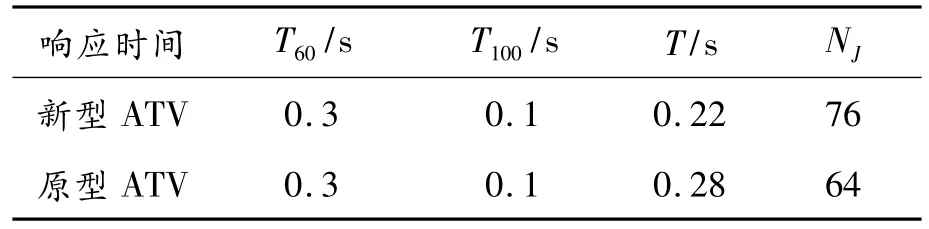
表4 横摆角速度响应时间计分
角阶跃输入下的瞬态响应的综合评价分值NJ:新型ATV为76;原型ATV为64。
2.3 蛇行试验
简单模拟实车的蛇行试验如图12所示。通过测试新型ATV质心的横摆角速度并与原型ATV进行比较,评价新型ATV的转向运动性能。
图12 蛇行轨迹
按基准车速下的平均横摆角速度峰值r与平均转向盘转角峰值θ进行评价计分。由于仿真条件限制,只对横摆角速度峰值r进行评分。r由图13可得,即为图13中曲线4个峰值的绝对值的平均值[6-7]。
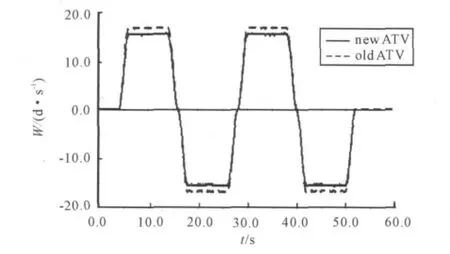
图13 横摆角速度响应
平均横摆角速度峰值r的计分值由式(6)计算,结果如表5所示。

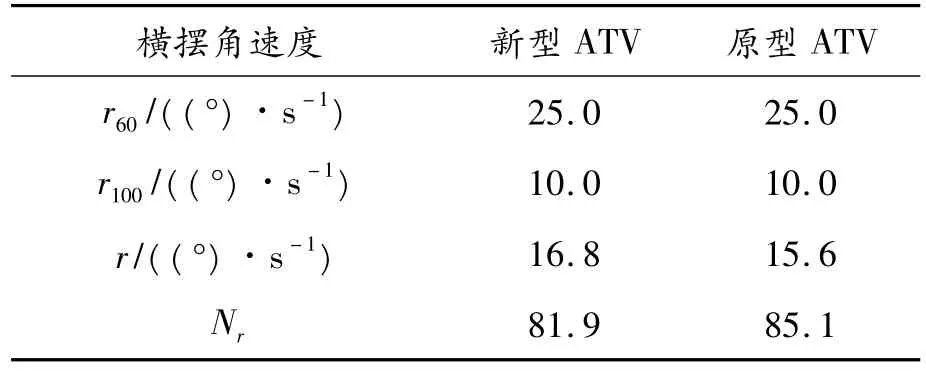
表5 平均横摆角速度峰值计分
蛇行试验综合评价分值:新型ATV为81.9,原型ATV为85.1。
2.4 综合评分
根据汽车操纵稳定性指标限值和评价法,通过3个试验对新型ATV的操纵稳定性与原型车比较,总评分值
新型ATV的总评分值为77.9,原型ATV的总评分值为75.4。
3 结束语
由以上分析可以发现,圆周运动时新型ATV随着车速的提高,转向半径不断增大,不足转向度偏大,但中性转向点加速度偏小,导致稳态回转评价分值小于原型ATV。方向把角阶跃下新型ATV的瞬态响应快,瞬态响应分值大于原型ATV,对操纵稳定性有利。但蛇行试验的平均横摆角速度偏大,导致分值小于原型ATV。综合评价新型ATV的稳态回转、角阶跃输入和蛇行试验,操纵稳定性优于原型ATV。
[1]张志飞,徐中明,彭旭阳,等.全地形车操纵稳定性建模与仿真[J].重庆大学学报:自然科学版,2009(6):620-624.
[2]施演兵,李宏波.浅谈全地形车的制动性能[J].农业装备与车辆工程,2009(3):22-24.
[3]黄泽好,孙章栋,刘吉明,等.新型全地形车操纵稳定性仿真分析[J].重庆理工大学学报:自然科学版,2010(6):1-4.
[4]郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:械工业出版社,2002.
[5]李军,刑俊文.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
[6]王国强.虚拟样机技术及其在ADAMS上的实践[M].西安:西北工业大学出版社,2002.
[7]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].2版.北京:北京航空航天大学出版社,2009.
[8]余志生.汽车理论[M].4版.北京:机械工业出版社,2006.
[9]QC/T 480—1999,汽车操纵稳定性指标限值与评价方法[S].
[10]汽车工程手册:摩托车篇[K].北京:人民交通出版社,2001.
[11]喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005.
猜你喜欢
防爆电机(2020年3期)2020-11-06
天津教育·下(2018年9期)2018-07-13
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国光学(2015年5期)2015-12-09
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
中国铁道科学(2015年4期)2015-06-21
空间控制技术与应用(2015年1期)2015-06-05
电力自动化设备(2013年11期)2013-09-18
电气电子教学学报(2012年1期)2012-10-12
