履带车辆混合悬挂动态特性与匹配研究
2012-07-09 00:56张玉珍马国新
车辆与动力技术 2012年3期
张玉珍, 马国新
(中国北方车辆研究所,北京 100072)
油气悬挂具有很强的非线性特性,非常适合越野车辆,尤其是它具有其它悬挂所没有的可调性,这是它得到广泛应用的原因之一.随着油气悬挂技术的成熟和发展,很多履带车辆采用了油气悬挂,使车辆的相关性能得到了提高.而扭杆悬挂近年来的技术进步,单从特性上讲,其基本接近油气悬挂所能达到的性能,与油气悬挂相比具有重量轻、便于安装、可靠性高、维修保养方便等优点.于是人们就产生了将这两种悬挂混合来使用的想法,以便发挥它们各自的优越性.结果近年来在世界上出现了为数不多的混合悬挂车辆,我国的混合油气悬挂也正在研制中.
存在的问题是,目前对装用混合悬挂后的车辆的性能缺乏分析研究.与纯油气悬挂车辆和纯扭杆悬挂车辆相比,它有哪些缺点和不利因素不甚了解.因而在设计中有很大的盲目性,结果给项目研制留下了很多遗憾.
针对上述问题,我们对油气扭杆混合悬挂的履带车辆进行了整车动态性能的分析计算,并与纯油气和纯扭杆悬挂车辆进行了对比分析.
1 分析计算所采用的数学模型
假设车辆直线行驶,两条履带通过的路面历程相同,车体两侧安装对称相同的悬挂装置,这样履带车辆振动系统可以用图1那样的模型来表示.

图1 油气与扭杆混合悬挂履带车辆的动态系统
对油气扭杆混和悬挂系统来说,1、2、6轮上装有油气悬挂,3、4、5轮上装有扭杆悬挂.
如果只考虑车辆的等速运动,即不考虑X方向的加速度、牵引力和制动力,方程可表达为:
式中:mZ为车辆悬置质量;n为车辆一侧轮数;FZi为作用到第i个负重轮上的力,i=1,…,n;T0为侧履带预张紧力;Gn为车辆悬置重量;Iψ为车体纵向转动惯量;Li为第i个负重轮到质心的距离.
如果考虑X方向的加速度、牵引力和制动力,那么方程就比较复杂.方程与下列参数有关:
式中:mX为车辆平移质量;PT为在动态中地面与行动系统相互作用的水平力 (牵引力);γi,γn分别为在第i个和第n个负重轮下面起伏路面的倾角;TCB,Tρ分别为履带环的自由段和工作段的张紧力;ρ为轮 (履带)与土壤相互作用时的摩擦角;βK,βV为履带前后支段的接近角和离去角;G0为车辆质量;La,Lb分别为质心到主动轮和诱导轮的水平方向的距离;a1,a2分别为质心到主动轮和诱导轮的垂直方向的距离.
详细内容请参考有关文献[1-3].
分析计算所采用的路面为典型随机越野起伏路面,平均波长为6.167 m,平均不平度高度为0.133 m.计算所用车辆原始参数为40 t履带车辆,这里不再一一列举.
2 油气和扭杆的悬挂特性
在进行分析计算以前,根据原车前后油气悬挂的机构型式、安装方案、气室容积、充气压力、动静行程以及扭杆悬挂的相关参数,先对混装的油气悬挂和扭杆悬挂的特性分别进行了计算,见图2,以便为整车动态特性计算分析作准备.

图2 油气和扭杆悬挂原始特性
由图2的特性曲线可以看出:前后油气悬挂特性不相同,尤其是前后油气悬挂特性与扭杆悬挂特性相比差别更大.
3 油气扭杆混合悬挂履带车辆动态性能分析
根据上述的数学模型和原车的悬挂特性曲线,在指定的路面上进行了动态性能包括行驶平顺性、功率消耗、动态行程、负重轮动态力等方面的计算.为了便于对比分析,分别对混合悬挂、纯扭杆悬挂和纯油气悬挂进行了上述性能的计算.
3.1 驾驶员处振动加速度
驾驶员处振动加速度是评价车辆舒适性的重要指标之一,3个车的计算结果见图3.
图3中的QB表示油气和扭杆混合悬挂车辆,Q表示纯油气悬挂车辆,而B则表示纯扭杆悬挂车辆.从图3可以看出:纯扭杆悬挂在15~55 km/h的范围内有较好的平顺性,油气悬挂次之,油气扭杆混合悬挂性能最劣,其突出特点是共振峰值较高,综合加强了纯油气和纯扭杆悬挂车辆的共振趋势.如果将振动加速度水平定为一个1g,那么,纯扭杆悬挂车的车速能达到38 km/h,纯油气悬挂车速可达28 km/h,油气扭杆混合悬挂车辆的车速只有26 km/h.如果将振动水平提高到1.5g,纯油气和扭杆车辆均能达到41 km/h,而扭杆和油气混合悬挂只有31 km/h的车速.

图3 驾驶员处振动加速度
3.2 减振器的吸收功率
减振器吸收功率是表征悬挂系统匹配的指标之一,高的平顺性、小的吸收功率是好的悬挂匹配.3种车辆在各种不同车速下的吸收功率示于图4中.
图4 减振器吸收功率
由图4可见油气扭杆混合悬挂减振器的吸收功率均高于纯扭杆和纯油气悬挂车辆,尤其在大于35 km/h以上时更为严重.在一定条件下吸收功率多,但又没有起到更好的减振作用,增加了发动机的功率消耗,降低了减振器的可靠性.对照图3和图4看,纯扭杆和纯油气悬挂车辆有较低的振动加速度和较低的功率消耗,而油气扭杆混合悬挂车辆有高的振动加速度且有高的功率消耗.
3.3 负重轮动态行程
负重轮动态行程是评价车辆动态稳定性的重要指标,大的动态行程具有大的动态力,故它也是关系到油气弹簧和扭杆可靠性的指标.对于气囊式油气弹簧来说,大的动态行程意味着胶囊承受大的动态压缩量,减少了气囊的使用里程.对扭杆来说,大的动态行程就意味着扭杆承受大的动态应力,同样降低扭杆的使用里程.大的动态位移使车辆处于不稳定状态.同样条件下的3种车辆的动态行程示于图5中.
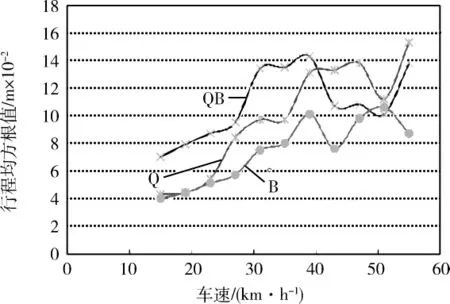
图5 负重轮行程均方根值
由以上平顺性分析可知:在我们选定的路面上,3种车辆在指定的加速度下,车速均不会超过40 km/h,而就在这个可实现的车速以下,油气扭杆混合悬挂的车辆比其余2种车辆的动态行程在大部分车速下超过一倍.
3.4 负重轮动态力沿负重轮顺序数的分布
负重轮动态力沿负重轮顺序数的分布追求趋于均匀,非均匀突变性的分布会将动态力集中到某一负重轮上,造成该轮的早期破坏.分析计算表明:同一车辆,不同车速,其呈现不同的分布规律.将15 km/h和30 km/h车速下3种车辆的动态力分布规律分别示于图6和图7中.

图6 15 km/h时各悬挂方案负重轮动态力对比

图7 30 km/h时各悬挂方案负重轮动态力对比
由图6图7可知,在低车速下几种车辆动态力的分布基本理想;而在高速时,呈现完全不同的分布规律,最理想的动态力分布是纯扭杆车辆,而油气扭杆弹簧混合悬挂的车辆的动态力分布具有很强的不均匀性和突变性,易造成个别车轮和悬挂早期故障.
4 油气扭杆混合悬挂的匹配
从上述分析讨论可得出结论:混合悬挂履带车辆的各项动态特性均不如纯扭杆悬挂方案和纯油气悬挂方案,它动态性能低劣,激发车辆共振的机率增多,对路面的适应性较差.但如果对油气扭杆混合方案进行进一步优选匹配会得到多大程度的改进呢?我们对这一问题作了进一步的工作.将1、2、6轮的油气悬挂进行改进设计,使其有如图8所示的悬挂特性.
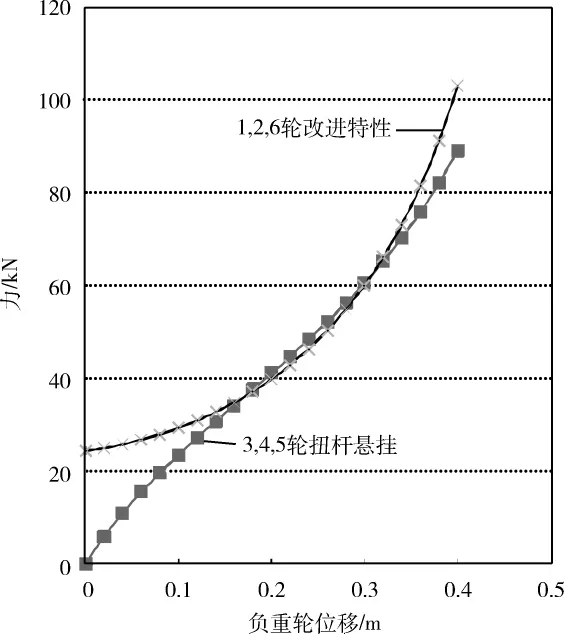
图8 优化匹配方案悬挂特性
对新方案油气扭杆混合悬挂履带车辆的动态特性计算结果示于图9~图12中.由图9~图12可见,优选匹配方案在振动加速度、吸收功率、负重轮动态行程和动态力沿各轮分布 (见图6和图7)等方面均得到了显著的改进.该结果也说明在油气扭杆混合悬挂的履带车辆设计中,扭杆特性与油气悬挂特性有一个最佳匹配问题,在设计中应特别注意.对原方案和新方案动态特性计算结果分析可发现,无论怎样匹配悬挂特性,装用油气和扭杆混合的悬挂履带车辆,其动态特性型态仍然不变,这是油气和扭杆混合悬挂履带车辆固有的,也是它的固有缺点.

图9 改进方案的负重轮动态行程对比

图10 改进方案的驾驶员处振动加速度对比
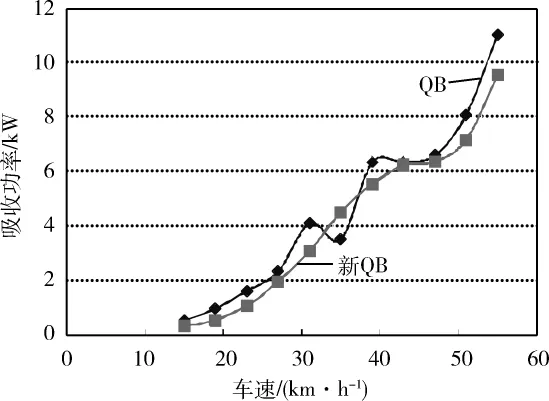
图11 改进方案的减振器吸收功率的对比

图12 优化改进方案的总效果
5 结论
1)油气扭杆混合悬挂履带车辆的各项动态特性均不如纯扭杆方案和纯油气悬挂方案,它动态性能低劣,激发车辆共振的机率增多,对路面的适应性较差,易造成车辆的早期故障.
2)在油气扭杆混合悬挂的履带车辆设计中,扭杆特性与油气悬挂特性有一个最佳匹配问题,在设计中应特别注意.计算结果分析可发现,无论怎样匹配悬挂特性,装用油气和扭杆混合悬挂的履带车辆,其动态特性型态仍然不变,这是油气和扭杆混合悬挂履带车辆固有的,也是它的固有的问题.
3)根据上述讨论,建议如果不是特殊需求的车辆,最好不要采用油气扭杆混合悬挂的方案.
4)采用油气扭杆混合悬挂的优点是,它既充分利用了油气悬挂的可调性,又充分利用了扭杆易安装、成本低、可靠性高和易维修保养等优点.但其带来的车辆动态性能问题也不容易忽视.
[1] I.M.Ibrabim,M.O.A.Mookhtar,A.M.El-Butch.Ner Suspension Design for Heavy Duty Trucks:Design considerations[C].2003-01-3424.
[2] А.В.Бойков, Ю.П.Волков, В.Е.Ролле. Расчет Плавности хода гусеничных машин [ M ].Ленинград,1990.
[3] Ю.П.Волков,В.Е.Ролле,А.Д.Самойлов. Ходовая часть транспортных гусеничных машин [M].1997.
猜你喜欢
中国石油石化(2021年8期)2021-03-30
石油化工建设(2019年6期)2020-01-16
装备制造技术(2019年4期)2019-06-21
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
林业工程学报(2017年4期)2017-08-07
铁道科学与工程学报(2015年4期)2015-12-24
装备机械(2015年1期)2015-02-28
汽车维护与修理(2015年5期)2015-02-28