
履带-负载轮-地面耦合作用关系研究
2017-08-07 05:50冯莉邓兆军马岩杨春梅宋文龙郭璨许洪刚
林业工程学报 2017年4期
冯莉,邓兆军,马岩,杨春梅,宋文龙,郭璨,许洪刚
(东北林业大学林业与木工机械工程技术中心,哈尔滨150040)
履带-负载轮-地面耦合作用关系研究
冯莉,邓兆军,马岩,杨春梅,宋文龙,郭璨,许洪刚
(东北林业大学林业与木工机械工程技术中心,哈尔滨150040)
为了解决履带行走机构对于履带选型、安装及整个机构的动力问题,分析了各个状态下履带与负载轮、履带与地面的相互作用关系,当三者都相互作用时,受力状况是最复杂的。在履带与负载轮的相互作用下,分析了履带与负载轮之间的摩擦力,给出了履带作用在负载轮上的力和力矩的计算方法,推导出了履带各段张紧力的计算公式,为履带的选型、安装及调试提供了理论依据。在履带和地面的相互作用下,建立履带车辆下陷数学模型,推导出了下陷量、驱动力及行驶阻力的计算公式,为履带车辆动力学计算及履带车辆行走机构的设计提供了理论依据,有利于缩短履带行走机构的设计周期。运用Adams对履带张紧力、行驶阻力、下陷深度、行驶驱动力仿真,仿真数据与理论数据数值误差在20%以内,验证理论公式的合理性。
摩擦力;张紧力;驱动力;行驶阻力;仿真
由于履带式车辆对恶劣行驶环境的适应性强,所以其在林业机械领域使用极为广泛[1],因此对履带进行结构设计是非常必要的。但在履带的结构设计中缺乏动力设计参数及运动设计参数的理论依据,更多是依靠经验,严重影响了机构工作的可靠性及结构的最优性。在履带机构安装及调试过程中缺乏力学理论依据,仅凭借经验及实际操作情况进行调整,大大延长了调试周期,增加了设计成本,消耗大量人力、物力,所以创建行之有效的解决方法是十分必要的。
1 履带模型构建
履带车辆的行走机构由1个主动轮、2个诱导轮、2个负载轮及橡胶履带组成(图1)。履带可简化为没有变形的柔性带,将主动轮、诱导轮、负载轮包围构成履带传动机构。履带模型通过描述履带与负载轮、诱导轮的传动方式,体现出各个轮之间的作用关系及整个机构与地面的相互作用关系。

1.主动轮; 2. 履带 ;3.负载轮; 4. 诱导轮图1 履带行走机构简图Fig. 1 The schematic diagram of crawler travel mechanism
2 履带-负载轮-地面的相对位置关系
履带车辆与地面的相互作用是由地面产生的激励,通过履带与负载轮、主动轮和诱导轮的作用传递到林业机械车体,所以履带的受力状况及运动状态对林业机械车辆的机动性有重要影响。从履带、负载轮、地面三者的空间位置可分为4种情况。
1)履带、负载轮、地面三者互不接触如图2,此时负载轮不受承载力。
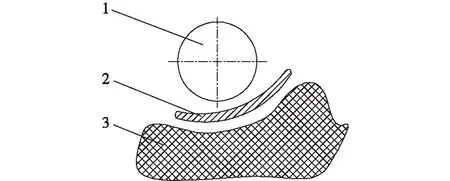
1.负载轮; 2. 履带; 3.地面图2 负载轮、履带和地面互不接触Fig. 2 Load wheel, track, and ground without touch by each other
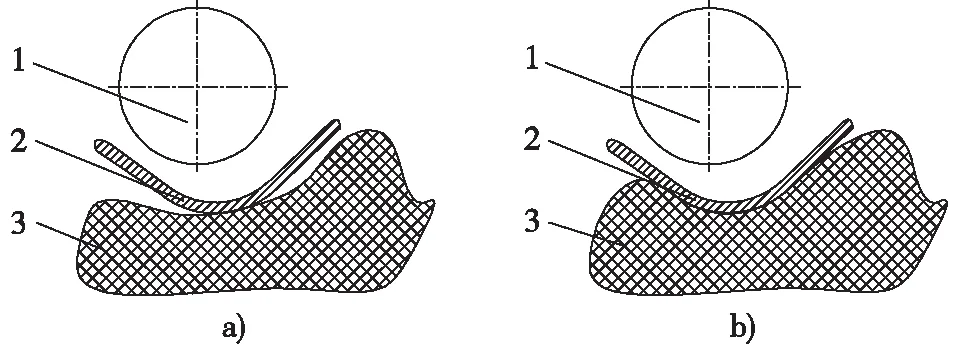
2)履带与负载轮之间有相互作用,负载轮所受力为履带张紧力。负载轮、履带点接触,与地面互不接触,如图3a;负载轮、履带线接触,与地面不接触,如图3b。

1. 负载轮; 2. 履带; 3. 地面图3 负载轮、履带接触,履带与地面不接触Fig. 3 The track in contact with load wheel but not with ground
3)负载轮、履带不接触,履带与地面接触,负载轮不受力。负载轮、履带互不接触,履带与地面点接触图4a;负载轮、履带互不接触,履带与地面线接触图4b。
1. 负载轮; 2. 履带; 3. 地面图4 负载轮、履带互不接触,履带与地面接触Fig. 4 The track in contact with ground but not with load wheel
4)负载轮、履带、地面互相接触,负载轮受力。负载轮与履带线接触,履带与地面点接触如图5a;负载轮、履带、地面线接触如图5b;负载轮、履带、地面点接触如图5c;负载轮、履带点接触,履带与地面线接触如图5d。

1.负载轮; 2. 履带; 3. 地面图5 负载轮、履带、地面互相接触Fig. 5 The contact between load wheel, track and ground
可见三者都相互作用时,三者之间的受力状况是最复杂的,地面作用到履带上的压力、剪切力、摩擦力通过履带进一步传递给负载轮、主动轮、诱导轮,最终作用在车体上[2-3]。
3 履带与负载轮的相互作用
3.1 履带与负载轮之间的摩擦力
履带与负载轮之间的摩擦力出现在履带、负载轮接触与地面不接触,以及履带、负载轮、地面都接触这两种状态。履带和负载轮之间的摩擦力很大程度上影响着动力的传递及车辆行驶的稳定性,所以对摩擦力的计算是非常重要的[4]。
履带与负载轮之间第i个接触点的摩擦力可用下式表示:
(1)

当摩擦力与相对速度方向相同时,即a>0时,sig(a)=+1;当摩擦力与相对速度方向相反时,即a<0时,sig(a)=-1[3]。
3.2 履带作用在负载轮上的力和力矩
第i个负载轮上的力矩是由摩擦力以转矩的形式传递到负载轮上,即摩擦力矩:
(2)

履带作用在第i个负载轮上的力,为该负载轮所被包络履带张紧力的矢量和如图6所示,则该作用力可表示为:
(3)


图6 履带-地面-负载轮受力分析Fig. 6 Analysis of force of track-ground-load wheel
3.3 履带张紧力
履带车辆在复杂路面工作时,复杂路面产生的激励首先与履带相互作用,所以履带的结构及性能对整机的工作有极大影响。履带张紧力直接影响着履带的结构设计及履带行走机构的调试,所以对履带张紧力的研究是十分重要的。
履带车辆在匀速行驶及非匀速行驶状态下,履
带与主动轮、负载轮、诱导轮的受力状态不同,所以各段履带张紧力是不同的[5-7]。图7为各段履带张紧力分布状况。
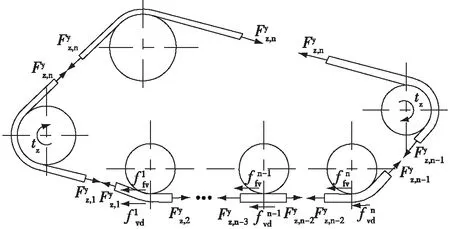
注为匀速行驶状态时履带和地面间的摩擦力;为履带与负载轮间第i个接触点的摩擦力;tz为主动轮驱动扭矩。图7 履带受力的分布Fig. 7 Force distribution on track
在匀速行驶状态下,第i段履带张紧力值可表示为:
(4)

已知匀速行驶为非匀速行驶的初始状态,由理论力学可得关系式:
(5)
(6)

整个履带的各段履带张紧力值可通过如下矩阵表示:

(7)

4 履带与地面的相互作用
由于履带车自身负载会对地面产生力的作用,因此履带会在地面产生下陷现象,由于地面的下陷,履带会被路面土壤包络产生行驶阻力,阻碍履带车的行驶。因此履带车辆的下陷量、履带车的行驶阻力和履带驱动力是评价和预估履带车辆行驶能力的关键因素,也是履带行走机构设计的主要动力影响因素[8-9]。
4.1 履带车辆下陷量计算
履带车辆正常行驶情况下,地面土壤包络负载轮及履带的深度不会超过负载轮半径与履带厚度之和。将包络负载轮的履带均分成m份,每份的长度为σ,该段履带每个点的下陷量如图8所示并建立坐标系[10],第g个点的下陷量Xg表示为:
(8)
式中:rf为负载轮半径,m;g为履带上的第g个点;m为将履带分为m份;σ为1/m份履带长度,m;ε为履带厚度,m;Yg为履带上的第g个点的纵坐标值,m。

g为履带上的第g个点;m为将履带分为m份;σ为1/m份履带长度,m;Xg为第g个点的下陷量,m;Yg为履带上的第g个点的纵坐标值,m。图8 负载轮-履带-地面下陷量几何关系Fig. 8 Geometric relationship of load wheel-crawler-ground subsidence
4.2 履带驱动力计算
履带车辆的驱动力是由履带剪切地面产生的,所以计算驱动力可由计算履带与地面之间的剪切力获得,由Mohr-Coulomb强度理论可知,土壤单位面积剪切强度τmax与内聚力pn和φ内摩擦角的关系为[3]:
τmax=pn+σntanφ
(9)
式中:pn为土壤的内聚阻力,N;σn为接触面法向作用力,N;φ为包络土壤内摩擦角(°)。
由Janosi剪切模型可知,最常遇到的为塑性地面,且剪切力可表示为[3]:
(10)
式中:τmax为土壤单位面积的剪切强度;xj为履带与地面接触的剪切位移,m;k为剪切应力作用下变形模量,kN/m2。
履带与地面之间的剪切应力公式可由公式(9)和(10)推得:
(11)
由于履带车辆在林间正常行走的时候,履带与地面之间会出现漂移或者空转,所以履带提供的驱动力应考虑漂移或空转的影响。即应考虑由于该现象产生的驱动损失率γ,驱动损失率γ可由下式表达:
(12)
式中:vs为履带实际驱动速度,km/h;vL为履带理论驱动速度,km/h;vx为履带接触地面的相对速度,km/h。
(13)
式中:b为履带的宽度,m;L为与地面接触履带长度,m;xs为履带行驶位移,m;s为履带与地面的接触面积,m2。
4.3 履带行驶阻力计算
履带车辆正常行驶时会下陷,履带车辆需将下陷后阻碍行驶的土壤压实,阻碍履带车辆行驶的土壤对履带作用产生行驶阻力。即履带车辆行驶阻力所做的功为履带压实土壤所做的功。履带行驶阻力计算方法大多采用半经验公式的方法计算,贝克计算公式是常用的行驶阻力计算方法,通过贝克提出的压力-下陷关系推导履带行驶阻力计算方法[11-14]。
贝克提出的压力-下陷关系为:
(14)
式中:p为接触面法向压力,N;x为履带车辆下陷量,m;kc为土壤内聚力变形模量,kN/mn+1;kφ为土壤内摩擦角变形模量,kN/mn+2;b为履带的宽度,m;n为土壤变性指数。
履带车辆最大下陷量xmax可表示为:
(15)
式中:G为履带车重力,N;l为履带车辆行驶距离,m。
履带车辆行驶过程中压实土壤所做功可表示为:
(16)
式中:b为压实土壤宽度即履带宽度,m。
履带车辆行驶过程中行驶阻力所做功可表示为:
(17)
式中:FR为行驶阻力,N。

图9 履带车辆履带张紧力、行驶阻力、下陷深度、行驶驱动力理论与仿真值结果对比Fig. 9 Comparison between theoretical and simulated results of tracked vehicle in aspects of track tension,driving resistance, subsidence depth, and driving force
由上式可得行驶阻力FR为:
(18)
5 Adams仿真分析
根据履带车辆的具体结构参数,利用Adams软件的ATV模块建立履带车辆的仿真模型,分别对履带车辆的履带张紧力、下陷深度、行驶驱动力、行驶阻力进行仿真,与本文的理论值进行对比。
本研究选取砂壤土路面进行动力学仿真,在Adams中设置土壤参数及履带车辆的运动参数如表1所示。

表1 土壤物理性能及履带车辆运动参数
履带车辆在砂壤土上运动时,其履带张紧力、行驶阻力、下陷深度及行驶驱动力的理论结果和仿真结果的对比如图9所示。由图可知,其理论值和仿真值的结果在变化趋势上基本一致,数值误差在20%以内,验证了本文理论公式的合理性。
6 结 论
笔者分析了各个状态下履带与负载轮、履带与地面的空间作用关系,得出在履带、负载轮、地面同时作用是最复杂的作用情况,通过对履带与负载轮的力学分析得到摩擦力的计算方法,进而得出履带作用在负载轮上的力和力矩的计算方法,推导出了履带各段张紧力的计算公式。在履带和地面的相互作用下,对履带车辆下陷实际状况建立数学模型,推导出了下陷量的计算公式;并以贝克提出的压力-下陷关系公式为基础,推导出履带车辆驱动力及行驶阻力的计算公式,为履带车辆动力学计算及履带车辆行走机构的设计提供了理论依据;并通过Adams仿真验证了本研究理论公式的合理性。
[ 1 ]吉洋. 林用履带机器人底盘设计与仿真分析[D]. 北京:北京林业大学,2013:7-11. JI Y.The chassis structure design and simulation analysis of forestry tracked mobile robots[D].Beijing:Beijing Forestry University,2013:7-11.
[ 2 ]朱兴高, 顾亮. 履带对地面的包络特性研究[J]. 北京理工大学学报, 2016, 36(1):48-52. ZHU X G, GU L. Research on envelope characteristics of the track on ground [J]. Transactions of Beijing Institute of Technology, 2016, 36(1):48-52.
[ 3 ]朱兴高. 高速履带车辆负重轮系-履带-地面耦合动态特性研究[D]. 北京:北京理工大学, 2015:10-52. ZHU X G. Coupling dynamic characteristic research for wheels-track-terrain system of high-speed tracked vehicles [D]. Beijing:Beijing Institute of Technology, 2015:10-52.
[ 4 ]闫振华, 王国强, 姚宗伟, 等. 大型履带行走装置支重轮和履带板接触分析[J]. 农业工程学报, 2012, 28(17):51-56. YAN Z H, WANG G Q, YAO Z W,et al. Contact analysis on huge crawler track wheel and track pad[J]. Transactions of the Chinese Socity of Agricultural Engineering, 2012, 28(17):51-56.
[ 5 ]黄雪涛, 顾亮, 吕唯唯, 等. 履带张紧力及其影响因素分析[J]. 兵工学报, 2014, 35(7):1110-1118. HUANG X T, GU L, LYU W W, et al. Track tension and its influencing factors[J]. Chinese Journal of Neuromedicine, 2014, 35(7):1110-1118.
[ 6 ]WONG J Y, HUANG W. An investigation into the effects of initial track tension on soft ground mobility of tracked vehicles using an advanced computer simulation model[J]. Proceedings of the Institution of Mechanical Engineers, Part D:Journal of Automobile Engineering, 2006, 220(6):695-711.
[ 7 ]黄雪涛, 顾亮, 朱兴高, 等. 履带张紧力及其在履带环上的分布[J]. 北京理工大学学报, 2016, 36(3):226-230. HUANG X T, GU L, ZHU X G, et al. Track tension and its distribution on track link[J]. Transactions of Beijing Institute of Technology, 2016, 36(3):226-230.
[ 8 ]姚禹. 基于履带-地面耦合系统的低速履带车辆通过性研究[D]. 长春:吉林大学, 2016:13-19. YAO Y. Research on the trafficability of low-speed tracked vehicle based on track-soil coupling system[D]. Changchun:Jilin University, 2016:13-19.
[ 9 ]李勇. 多履带行走装置关键设计技术研究[D]. 长春:吉林大学, 2011:12-42. LI Y. Study on the key design technologies of multi-crawler travelling gear[D]. Changchun:Jilin University, 2011:12-42.
[10]朱兴高, 顾亮. 履带车辆行驶速度对负重轮动位移的影响[J]. 东北大学学报(自然科学版), 2016, 37(4):548-553. ZHU X G, GU L. Effect of tracked vehicle speed on bogie wheels’dynamic displacement[J]. Journal of Northeastern University(Natural Science), 2016, 37(4):548-553.
[11]朱兴高, 顾亮. 某型履带车辆诱导轮结构强度分析[J]. 太原理工大学学报, 2015, 46(3):274-277. ZHU X G, GU L. Structure strength analysis on idler wheel of tracked vehicle[J]. Journal of Taiyuan University of Technology, 2015, 46(3):274-277.
[12]杜汉平. 基于刚-柔耦合履带起重机虚拟样机技术研究[D]. 大连:大连理工大学, 2006:12-43. DU H P. Research on virtual prototype technology of rigid-flexible coupled crawler crane[D]. Dalian:Dalian University of Technology, 2006:12-43.
[13]WONG J Y. Dynamics of tracked vehicles[J]. Vehicle System Dynamics, 1997, 28(2):197-219.
[14]迟媛, 张荣蓉, 任洁, 等. 履带车辆差速转向时载荷比受土壤下陷的影响[J]. 农业工程学报, 2016, 32(17):62-68. CHI Y, ZHANG R R, REN J, et al. Steering power ratio affected by soil sinkage with differential steering in tracked vehicle [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(17):62-68.
Study on coupling relationship of track-load whell-ground
FENG Li, DENG Zhaojun, MA Yan, YANG Chunmei, SONG Wenlong,GUO Can,XU Honggang
(ForestryandWoodworkingMachineryEngineeringTechnologyCenter,NortheastForestryUniversity,Harbin150040,China)
In order to solve the problems concerning track selection, installation,and the power of entire crawler mechanism, this paper analyzed the interaction between track and wheel load, track and ground in various states. When all of them interacted with each other, the force condition was the most complicated. Under the interaction of track and load wheel, the friction between the track and load wheel was analyzed, the calculation method of forces and moments on the load wheel acted by track was provided, and the tension formulas of various track segments were deduced, which would provide a theoretical basis for the track selection, installation and commissioning. Under the interaction of track and ground, the mathematical model of subsidence of tracked vehicle was established, the formulas of sag amount, and the driving force and the running resistance were deduced,which would provide a theoretical basis for the dynamic calculation and travelling mechanism design of tracked vehicle, and would be beneficial to shorten its design cycle. The simulations on track tension, travelling resistance, subsidence depth, and driving force were accomplished by using software ADAMS. The numerical error between the simulation data and the theoretical data is lower than 20%.The rationality of the theoretical formula is verified.
friction; tension; driving force; travelling resistance; simulation
2016-10-21
2017-03-15
国家林业公益性行业科研专项(201504508)。
冯莉,女,副教授,研究方向为林业机械。E-mail:fengli86@163.com
S776.01
A
2096-1359(2017)04-0115-06
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
石油化工建设(2019年6期)2020-01-16
现代营销·理论(2019年10期)2019-09-10
中国外汇(2019年9期)2019-07-13
机电工程技术(2018年11期)2018-12-03
家庭影院技术(2018年9期)2018-11-02
现代企业文化(2018年13期)2018-06-09
家庭影院技术(2018年3期)2018-05-09
现代农机(2018年1期)2018-02-11
