装煤机履带行走机构选用分析
2018-12-03 08:25:02张旭
机电工程技术 2018年11期
张 旭
(山西方华机械有限公司,山西阳泉 045000)
0 引言
装煤机广泛应用在煤矿装载及运输中,大大提高煤矿的生产率,装煤机履带行走机构的稳定性是装煤机工作效率的可靠保证。履带行走机构直接与地面接触,满足合理的接地比压,并提供足够的动力驱动装煤机行走。由于履带工况条件比较恶劣,经常与泥、砂石、水相接触,同时履带还承受冲击负荷[1]。选用履带行走机构需要充分考虑履带的附着性能、强度、刚度、耐磨性、耐腐蚀等因素,为了减小装煤机的接地比压,有效发挥动力设备的驱动效率,履带行走机构重量要轻。履带行走机构的合理选用对提高装煤机的承载性能及牵引力有重要的意义。
1 履带行走机构基本形式
履带行走机构主要包括:履带链、导向轮、张紧装置、履带架、支重轮、驱动装置、驱动链轮等部分。由于装煤机属于移动装载设备,其履带行走机构一般采用液压马达进行驱动,根据履带驱动装置的位置不同,履带行走机构的机构形式有两种:动力内置式履带行走机构和动力外置式履带行走机构[2]。
动力内置式履带行走机构,由于内置动力元件,考虑到内置元件的安装及检修空间因素,履带体积设计得较大,动力越大,履带尺寸也随之增大。动力装置外置式履带行走机构,动力安装在履带链外侧,通过传动系统驱动履带行走,履带链尺寸设计不受动力元件约束,相对于内置式履带行走机构,同样驱动力的履带外形尺寸可以设计得更小,适应煤矿井下生产设备空间要求[3]。
2 履带行走机构牵引力大小的影响因素
履带行走机构驱动力矩计算公式[4]:

式中:F为牵引力,N;M为动力装置输出转矩,N·m;R为驱动链轮节圆半径,m;η为机械效率,%。
从式(1)可以看出,牵引力与驱动链轮节圆半径成反比关系。同样动力装置输出转矩下,驱动链轮节圆半径越大,得到需要的牵引力越小。因此,减小驱动链轮节圆半径可有效提高装煤机的牵引力。
2.1 动力内置式履带行走机构
动力内置式履带行走机构,动力装置和履带架安装在外层履带形成的闭环中,装载机运行时,动力元件有履带保护。动力组成包括:轴向柱塞马达、大速比行星传动机构。在动力装置输出壳体上直接安装驱动链轮,驱动链轮与动力装置组成一体。通过驱动链轮与履带啮合传动扭矩,驱动履带行走[5]。
由于履带轮直接与动力装置输出壳体联结,驱动轮内径、外径尺寸受到动力装置壳体大小的影响,考虑到动力装置的安装及检修空间,内置式履带行走机构体积较大,驱动链轮节圆半径较大。
2.2 动力外置式履带行走机构
动力外置式履带行走机构,动力组成包括:低速大扭矩液压马达、行星传动机构(单级)。动力装置安装在履带架外侧,驱动轮尺寸不受驱动单元尺寸的限制,相对于动力内置式履带行走机构,动力外置式履带行走机构具有更小的驱动链轮节圆半径。
从式(1)可以看出,动力装置输出转矩与驱动轮节圆半径大小成正比。由于动力外置式履带行走机构驱动轮节圆半径较小,相等的牵引力下,需要的动力装置输出转矩也小。动力装置体积减小,履带行走机构的体积相应减小,整机重量减轻,驱动系统功率降低。动力外置式履带行走机构牵引力的增大不受动力元件空间限制,仅需要通过调整液压马达安装法兰安装尺寸,并把对应的履带架部分进行局部加固,其他部件保持不变,可在不增大设备体积的情况下获得更大的牵引力。
装煤机能正常行走的必要条件是牵引力应小于或等于额定附着力,额定附着力的计算公式为[6]:

式中:R为额定附着力,N;M为整机重量,kg;g为重力加速度,m/s2;μ为附着系数,如表1所示。
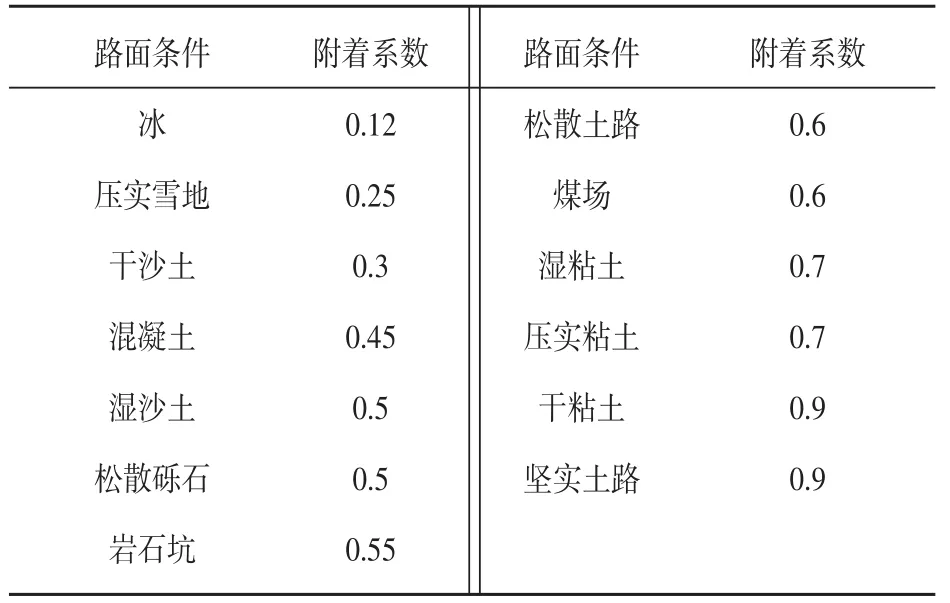
表1 履带机械不同路面的附着系数
装煤机履带行走装置最大牵引力力不仅和动力装置输出扭矩有关,和与地面间的附着力也有关系,由式(2)可以看出,通过增大装煤机重量可直接增加地面附着力动力,同样驱动功率下的履带行走机构的牵引力可达到最大值[7]。动力外置式履带行走机构的结构可增大装煤机重量,同时可保持装煤机最大外形尺寸不改变。在满足现场接地比压的前提下获得最大牵引力,适应井下狭小空间的要求。
3 接地比压对履带行走机构的要求
装煤机属于移动装载设备,可替代人工完成煤炭的装载及转运工作,由于井下巷道的限制,装煤机外形尺寸要尽可能小,并满足接地比压的要求,行驶及转运才能比较灵活,履带行走机构作为行走部件,和地面直接接触,履带行走机构平均接地比压为[8]:

式中:P为平均接地比压,Pa;G为设备整机重量,N;L为履带行走机构接地长度(单侧),m;b为履带板宽度,m。
由式(3)可以看出,装煤机的平均接地比压与装煤机重量成正比,随着装煤机整机重量的增大,为了保持接地比压满足要求,履带板宽度b和履带行走机构接地长度L也需要增大。一方面,由于履带行走机构接地长度越大,履带行走机构转向越不灵活。L的增大要满足转向要求;另一方面,井下巷道空间比较狭小,装煤机体积越大,机动性能越差,工作死角就相对较多。影响煤巷井下作业的工作效率[9]。
装煤机主要用于煤矿井下煤炭的装载和转运,履带行走机构行走的同时铲板插入煤堆中,耙爪耙取煤块通过受料口送料给带式输送机,物料通过输送机进入转运设备实现物料的装载运输。整个工作过程装煤机要完成铲取、输送、转运等工作,因此,装煤机需要足够的承载能力及行走能力。由于煤矿井下作业空间和工作条件的制约,装煤机外形要求紧凑,移动灵活,减少工作死角,最大层度上代替人力,提高输送效率。由于驱动内置式履带架体积较大,在井下煤巷现场相对低矮的工作环境有一定的局限性[10]。
4 结论
装煤机履带行走装置设计的合理性直接关系到装煤机的移动速度及运载能力。本文作者从装煤机牵引力与驱动链轮直径的关系,牵引力与地面额定附着力的关系,装煤机接地比压要求等方面进行分析,得出装煤机采用动力外置式履带行走机构比较合理的结论。通过试验和现场实际使用,采用动力外置式履带行走机构的装煤机满足煤矿井作业狭小空间的需求,极大提高装煤机工作效率。同时,装煤机动力外置式履带行走机构也要解决动力装置引起的偏重问题及防护问题,才能更好地发挥其结构的优越性。
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:42
大电机技术(2021年3期)2021-07-16 05:38:10
电机与控制应用(2021年12期)2021-02-28 07:52:56
World Journal of Clinical Cases(2020年2期)2020-04-22 01:47:48
电子制作(2018年18期)2018-11-14 01:48:24
电测与仪表(2017年20期)2017-12-19 05:14:16
凿岩机械气动工具(2017年2期)2017-07-19 10:21:16
工业设计(2016年6期)2016-04-17 06:42:51
汽车与新动力(2014年5期)2014-02-27 12:10:46
上海电机学院学报(2013年3期)2013-03-11 18:07:59