电动汽车稳定性的横摆力矩控制
2012-01-14 13:02张金柱张洪田孙远涛
电机与控制学报 2012年6期
张金柱, 张洪田, 孙远涛
(哈尔滨工程大学动力与能源工程学院,黑龙江哈尔滨150001)
0 引言
汽车稳定性控制系统是指通过车载控制装置实时调整汽车运行状态,使车辆能够按照驾驶员的期望行驶,防止车辆失稳的汽车主动安全系统[1],是当前国际上汽车安全领域的研究热点。电动汽车不仅可以缓解对石油的依赖,减少汽车的废气排放,在汽车控制稳定性方面,也有其优势。电机扭矩的响应为毫秒级,而内燃机响应达到 500 ms ~ 1 s[2-3]。由于采用轮毂电机技术,电机可以安装到每个车轮上。因此对单个车轮的独立控制提高了汽车稳定性。本文以汽车质心侧偏角和横摆角速度为稳定性控制变量,根据电动汽车控制特性,通过对单个车轮驱动或制动控制,产生横摆稳定力矩,提高汽车的行驶稳定性[4]。
1 仿真模型
仿真模型主要包括线性二自由度车辆模型、七自由度整车模型、轮胎模型和电机模型。
1.1 线性二自由度车辆模型
线性二自由度车辆模型没有考虑轮胎的非线性特性,以及轮胎的侧偏特性[5],只有侧向运动与绕轴的横摆运动这样两个自由度。根据牛顿定律得出线性二自由度车辆模型的运动微分方程[6]为
式中:m为汽车质量;Cf、Cr为前、后车轴的侧偏刚度;δ为前轮转角;Iz为汽车的转动惯量;a,b为汽车前、后轴至质心的距离;vx为纵向速度;vy为侧向速度;ω为横摆角速度;β为质心侧偏角。
1.2 七自由度整车模型
图1为包括汽车纵向运动、侧向运动、横摆运动和4个车轮旋转运动的七自由度整车模型,两电动机布置在后轮,由于忽略悬架系统而没有考虑汽车俯仰、侧倾和垂直运动。汽车纵向、侧向、横摆运动和车轮旋转运动可表示[7]为

其中:Fxfl,Fxfr,Fxrl,Fxrr,Fyfl,Fyfr,Fyrl,Fyrr分别为沿纵向、侧向的前左,前右,后左和后右轮胎力分量;d为左、右车轮轮距(假设前后车轮轮距相等);Jε为车轮滚动转动惯量;ωij为车轮角速度;Tbij为车轮制动力矩(i=f,r为前、后轮,j=l,r为左、右轮,以下同);Tdij为后轮驱动力矩;Fxij为车轮纵向力;Rε为车轮滚动半径。
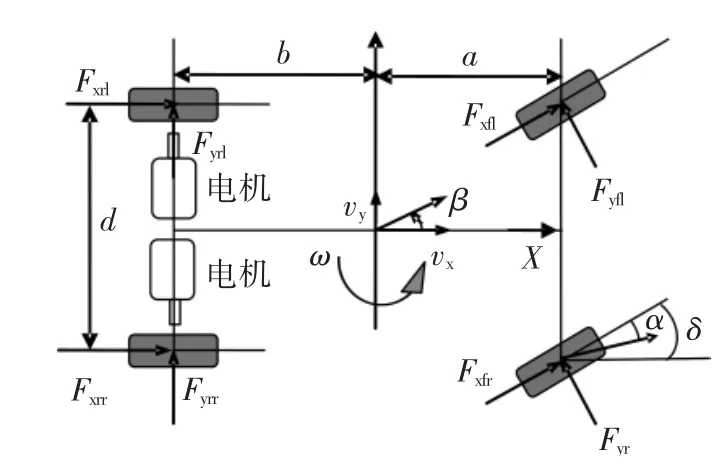
图1 七自由度车辆模型Fig.1 Three DOF vehicle model
1.3 轮胎模型
在进行汽车稳定性控制时,轮胎经常工作在非线性区域,传统的线性轮胎模型已经不能满足要求。Dugoff轮胎模型中,轮胎受到的纵向力和侧向力为[8]

式中:Fx、Fy分别为轮胎纵向力和侧向力;Cx、Cy分别为轮胎纵向和侧向刚度;μ为路面附着系数;λ为轮胎纵向滑移率;α为轮胎侧偏角;Fz为轮胎垂直载荷。
车轮的动载荷随汽车的行驶工况而变化。由轮胎模型可知,轮胎的垂直载荷对侧向力、纵向力有重要影响,轮胎模型必须考虑垂直载荷的变化。轮胎的垂直载荷可计算[9]为
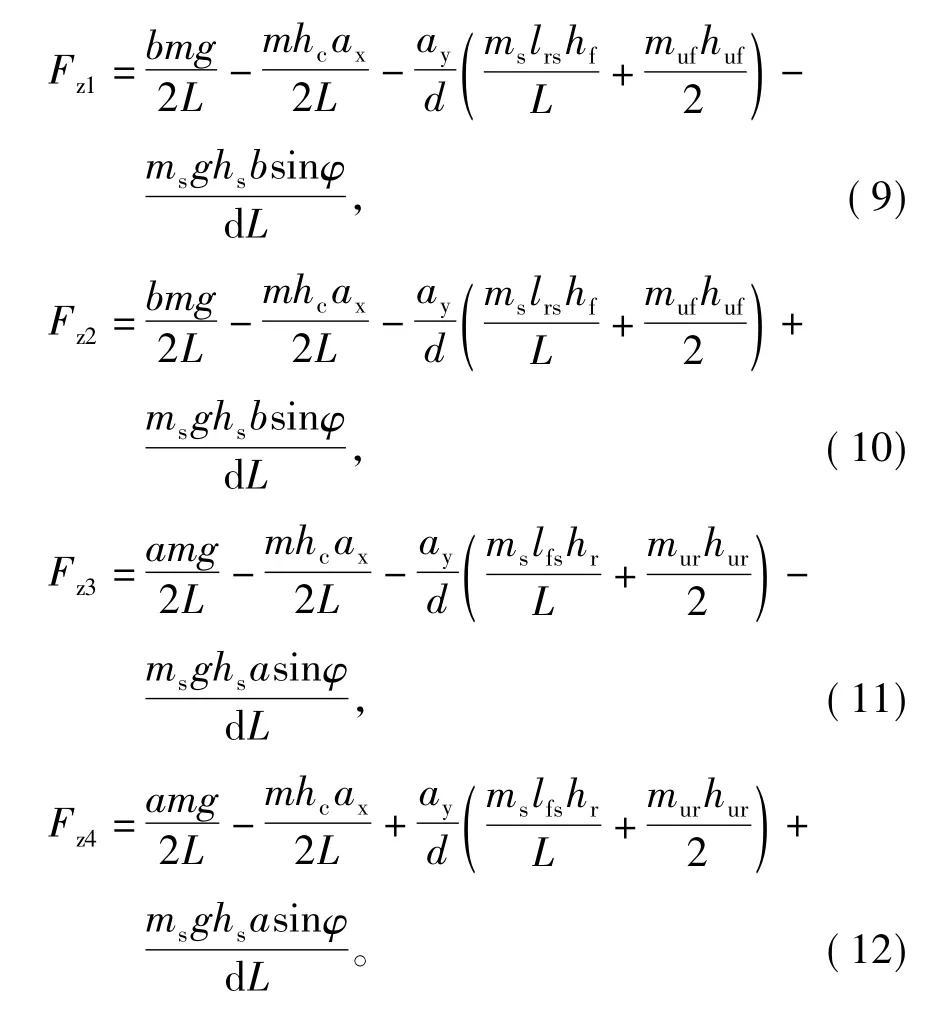
式中:Fzi为车轮垂直作用力(i=1,2,3,4);L 为汽车前后轴轴距;hc为质心离地高度;lfs、lrs为簧载质量质心至前、后轴距离;muf、mur为前、后轴非簧载质量;huf、hur为前、后轴非簧载质量质心高度;hf、hr为前、后轴侧倾中心离地面高度;ax、ay为汽车纵、侧向加速度;φ为汽车车身侧倾角。
车辆运动过程中,各个轮胎的侧偏角为
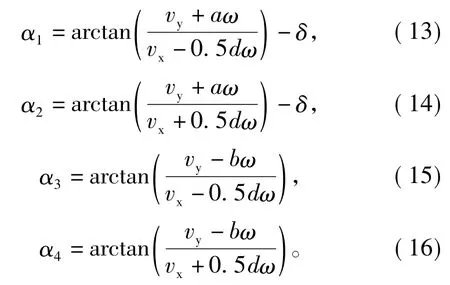
式中,α1、α2、α3、α4分别表示左前、右前、左后和右后轮胎的侧偏角。
为求车轮的滑移率,就要先求车轮的轮心纵向速度。在汽车侧向动力特性的影响下,各车轮轮心纵向速度可用
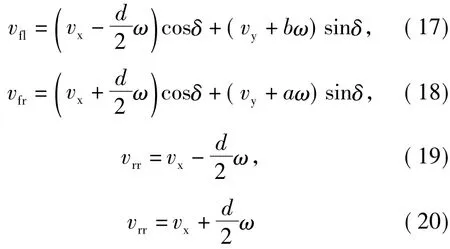
计算得到[10]。
车轮的滑移率λij表示车轮的滑动成份在总运动中所占的比重,定义为汽车纵向速度vij与车轮纯滚动折算的纵向速度Rwωij的差与汽车纵向速度vij的比值[11],即

1.4 电机模型
电机的扭矩与输入电压的关系可表示为一阶延迟系统[12],即

式中,Tm为电机扭矩;Kt为电机常数;Rm为电机电阻;Lm为电机电感;um为输入电压。
电机扭矩与纵向力的关系为

由式(3),式(5),式(6),式(22),式(23)可建立电机控制输入与汽车横摆运动响应的关系。
2 控制器设计
为提高车辆的操纵稳定性,设计滑模控制器汽车横摆稳定性控制的总体设计方案如图2所示。根据驾驶员输入的方向盘转角δ和车速vx由二自由度车辆模型确定理想质心侧偏角βd和横摆角速度ωd。以质心侧偏角偏差(β-βd)和横摆角速度偏差(ω-ωd)为滑模控制器的输入变量,输出量为控制汽车稳定性的横摆力矩Mz。通过横摆力矩分配策略将Mz转换为轮毂电机的驱动力矩或制动力矩Tm,保持汽车的行驶稳定性。
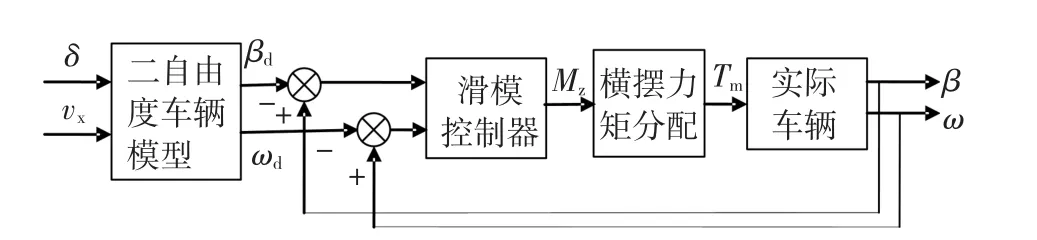
图2 稳定性控制系统结构示意图Fig.2 Block diagram of vehicle stability control system structure
2.1 理想质心侧偏角和横摆角速度
根据二自由度车辆可求得理想质心侧偏角βd和理想横摆角速ωd。
考虑到路面附着条件的限制,理想质心侧偏角和理想横摆角速分别为[13]
式中:K为车辆的不足转向系数,取K=2×10-3;βmax为质心侧偏角极限值,如在沥青路面上,约为±10°。
2.2 质心侧偏角估计
横摆角速度可由传感器获得,而于质心侧偏角不能用传感器直接测量,故利用状态观测器来估计车辆的质心侧偏角。根据状态观测器的原理,以二自由度车辆模型作为状态观测器的参考模型[14],即
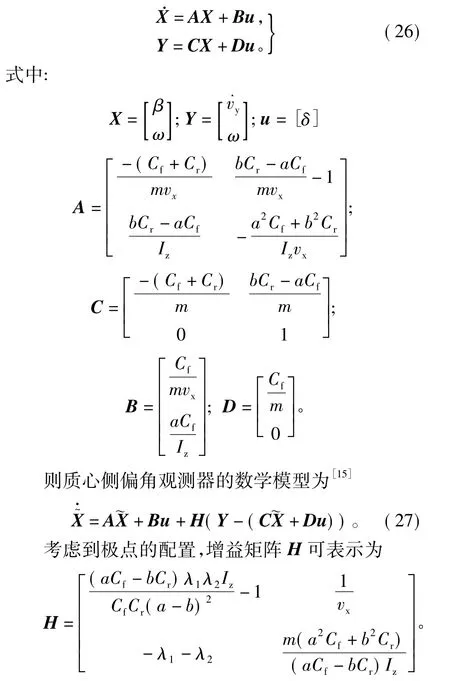
其中,λ1和λ2为观测器设定的极点。
2.3 滑模控制器设计
汽车稳定性控制系统的控制目的是使汽车横摆角速度和质心侧偏角能迅速、准确地跟踪当前设定值的任意变化,为此定义滑模控制的切换函数为[16]

式中,ξ为常数。
对s求导得

当调节系统控制输入使其保持在滑模面上运动时,系统趋于稳定,此时s=˙s=0,即

由于转向角δ较小,可忽略式(5)中有sin(δ)的项。其次由于是通过后轮毂电机施加稳定性控制,而不对前轮控制,故可认为前左右轮的纵向力相等,Fxfr=Fxfl。
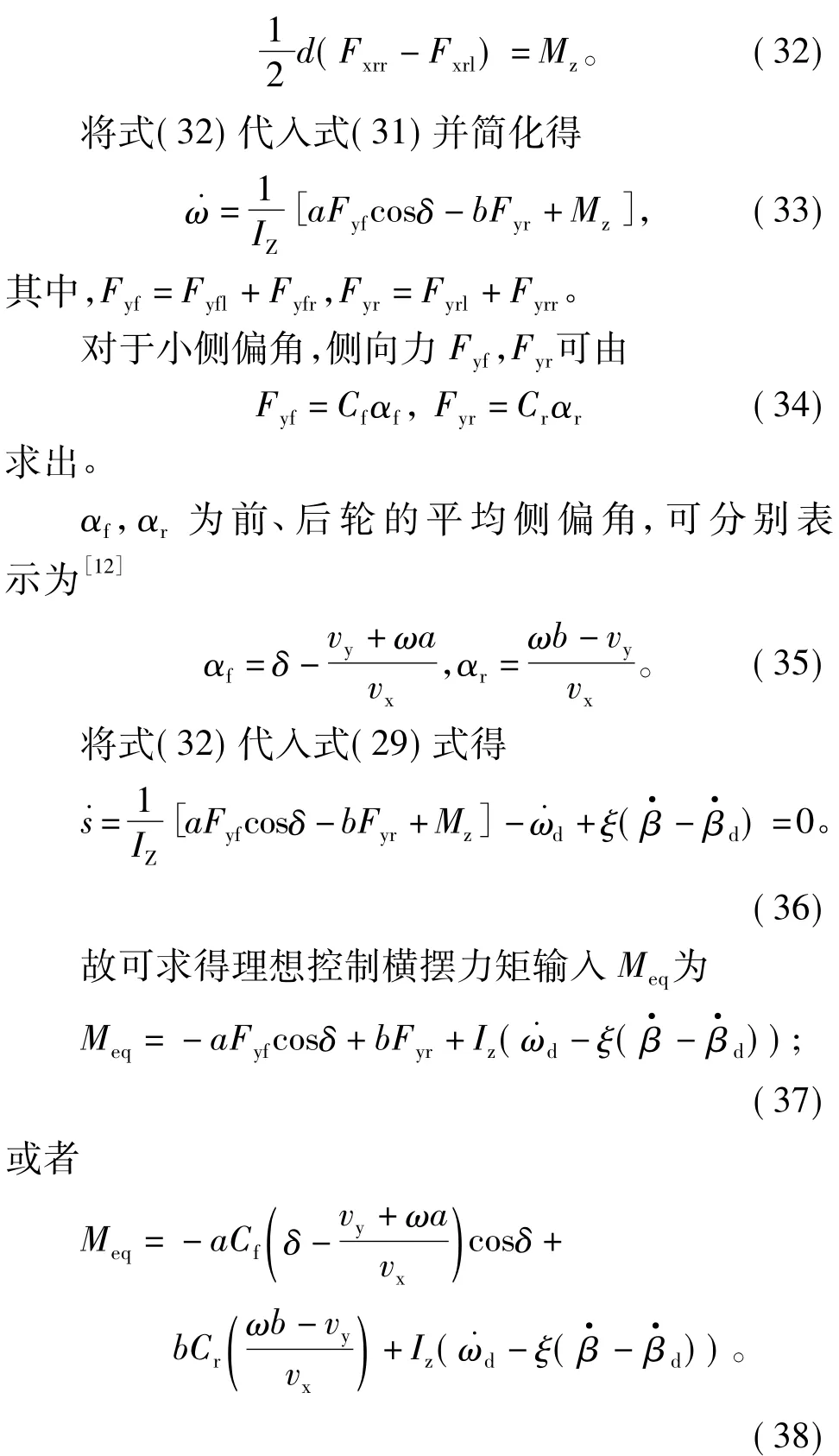
式(5)可化简为

式(31)中的最后一项为控制器施加的横摆力矩,即
但当系统参数变化或出现负载扰动时,若仅用理想控制输入Meq,控制系统将出现较大偏差,从而偏离滑模面运动。为使系统仍能快速准确回到滑模面上运动,定义切换控制律[17]

式中,k为切换增益,其值应足够大。综上可知系统总的控制输入为

为消除变结构控制产生的抖动问题,以饱和函数sat代替理符号函数sgn。

式中:

Δ>0,为滑模边界层的厚度。
2.4 横摆力矩的分配
内燃机驱动的汽车主要是通过制动力控制来实现稳定性。在发生失稳时,选择效果最好的某一个车轮,对其施加制动力,形成纠正车辆状态的横摆力矩。新一代的电动汽车普遍采用轮毂电机代替传统的动力传动系统,节省了安装空间,提高了系统效率。可以通过独立控制各个电机的扭矩产生驱动力或制动力的方法来改变作用在汽车上的横摆力矩,提高汽车的操纵稳定性。
所研究的电动汽车为双后轮驱动形式,如图1所示,可选用一侧后轮增加驱动或制动力矩,另一侧后轮减少驱动或制动力矩的分配方案。由式(23)和式(32)可得左、右后轮的驱动或制动力矩,即

式中,Tm,yrl、Tm,yrr分别为左后轮、右后轮的驱动或制动力矩。实际电机的驱动力或制动力还受到路面附着条件限制,不能大于路面最大附着力。
驱动或制动车轮的选择依据方向盘转角和横摆角速度偏差的符号。例如汽车左转时,若实际横摆角速度大于理想横摆角速度,表明汽车发生过多转向,则对右后轮制动,对左后轮驱动。
3 仿真结果分析
为了验证所滑模控制器的有效性,本文搭建了基于 CarSim动力学仿真软件[15]与 Matlab/SIMULINK软件的电动汽车稳定性控制虚拟仿真平台,实现控制策略的设计与验证。仿真选取的某电动轿车的参数为:a=1.09 m,b=1.53 m,d=1.44 m,m=1 764 kg,Iz=2 400 kg·m2,Iz=2 400 kg·m2,Cf=64.5 kN·m/rad,Cr=49.1 kN·m/rad。
图3~6为汽车在路面附着系数为0.4,以20 m/s速度在双移动线工况下仿真结果。图3为方向盘转角δ输入曲线,图4为左后轮和右后轮轮毂电机输出的扭矩。由图5和图6可知,未加控制的汽车横摆角速度和质心侧偏角都很大,汽车状态响应无法跟随驾驶员输入,汽车实际路径严重偏离理想路径.对于同样的工况,施加了横摆力矩控制的抑制了横摆角速度过大,车辆的侧偏角也较小。扭矩分配的结果是在车辆的外侧车轮施加了较大的制动力,而在内侧车轮施加了较大的驱动力。车辆实际运行的路径与期望路径保持一致,这表明横摆力矩控制提高了车辆的操纵稳定性。
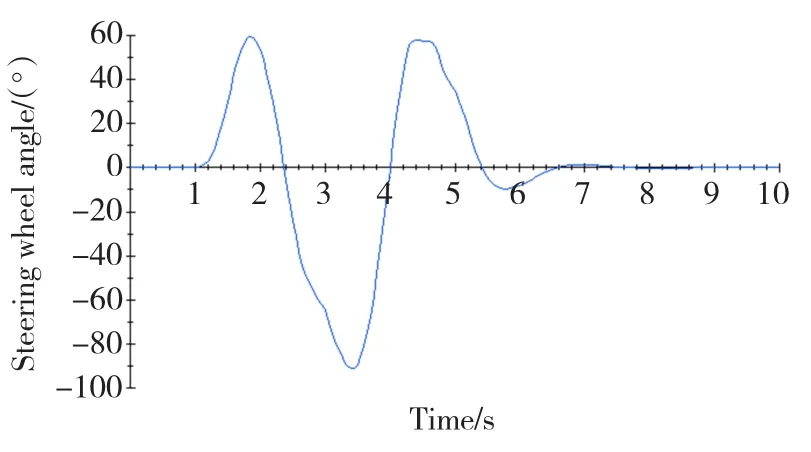
图3 方向盘转角输入Fig.3 Steering wheel angle input
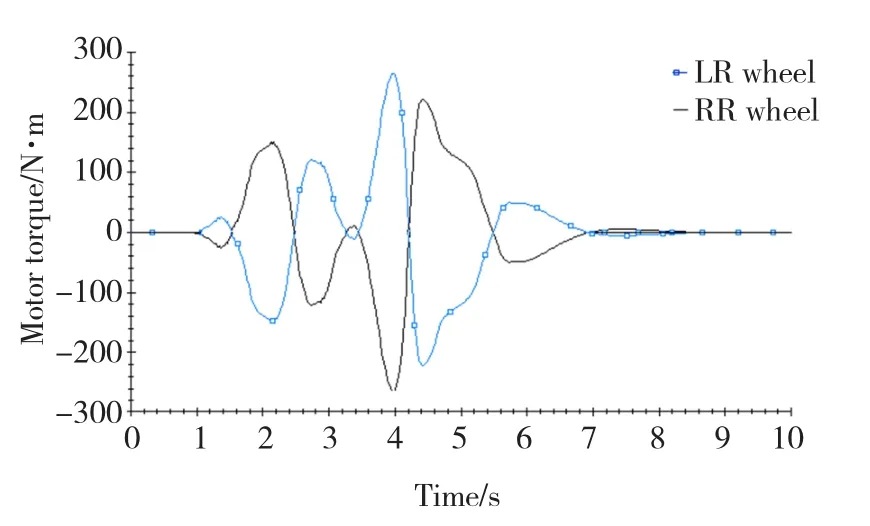
图4 电机扭矩变化曲线Fig.4 Motor torque change curve
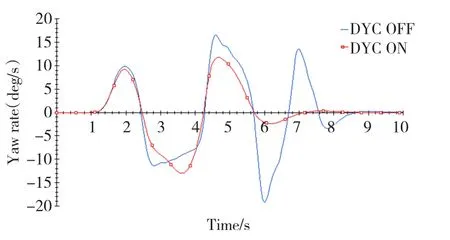
图5 横摆角速度响应曲线Fig.5 Yaw rate response curve
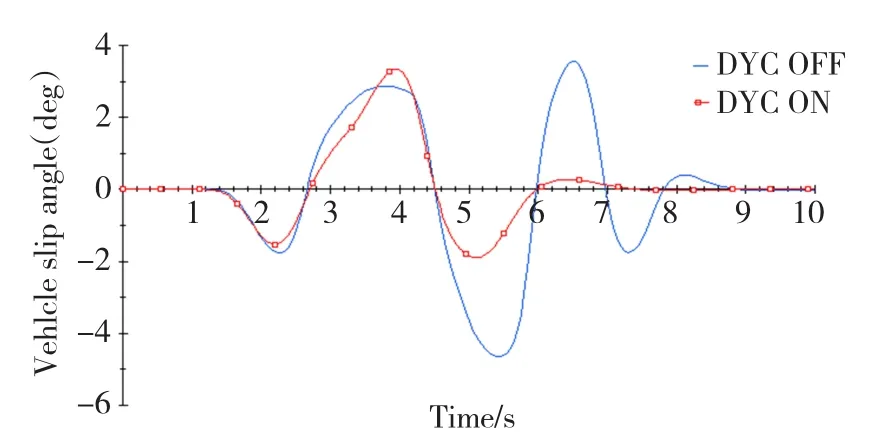
图6 质心侧偏角时间响应曲线Fig.6 COG Sideslip angle response curve
4 结语
本文提出了基于横摆力矩的电动汽车稳定性控制策略与算法。设计了基于状态观测器的汽车质心侧偏角估计算法。针对汽车控制系统的非线性和时变性,提出基于滑模理论的稳定性控制器,通过独立控制每个轮毂电机的驱动力或制动力,形成控制汽车稳定性的横摆力矩,使汽车横摆角速度和质心侧偏角跟踪它们的理想值。利用CarSim与Matlab/SIMULINK联合仿真技术,构建了电动汽车稳定性控制虚拟仿真平台,进行了双移线工况下的控制算法验证。理论分析和仿真表明在稳定性控制器作用下的车辆与无控制器作用的车辆相比具有更好的响应特性,实际的横摆角速度和质心侧偏角能很好地跟踪期望值,从而提高了电动汽车的行驶稳定性。
[1] NAKAZAWA M,ISOBE O,TAKAHASHI S,et al.Braking force distribution control for improved vehicle dynamics and brake performance[J].Vehicle System Dynamics,1995,24(4):413-426.
[2] 赵景波,周冰,贝绍轶.电动汽车EPS系统阻尼工况Bang Bang PID控制[J].电机与控制学报,2011,15(11):95-100.ZHAO Jingbo,ZHOU Bing,BEI Shaoyi.Bang-Bang-PID control of automotive EPS system under damping condition[J].Electric Machines and Control,2011,15(11):95 -100.
[3] 张志远,万沛霖.一种用于电动车辆驱动控制的模糊控制系统设计[J].电机与控制学报,2005,9(3):203-206.ZHANG Zhiyuan,WAN Peilin.Design of a fuzzy control system in driving control of electric vehicle[J].Electric Machines and Control,2005,9(3):203 -206.
[4] 丁惜瀛,张钦爽,覃艳丽,等.基于转矩分配的电动汽车横摆稳定性控制[J].大功率变流技术,2010(5):41-44.DING Xiying,ZHANG Qinshuang,TAN Yanli,et al.Yaw stability control of EV based on torque distribution[J].High Power Converter Technology,2010(5):41-44.
[5] ONO E,HATTORI Y,Muragish Y,et al.Vehicle dynamics integrated control for four wheel distributed steering and four wheel distributed traction/braking systems[J].Vehicle System Dynamics,2006,44(2):139-151.
[6] 罗虹,张立双,来飞,等.采用横摆力矩优化分配方法的车辆稳定性控制系统[J].重庆大学学报,2010,33(10):19-24.LUO Hong,ZHANG Lishuang,LAI Fei,et al.Vehicle stability control system design using optimal allocation of yaw moment[J].Journal of Chongqing University,2010,33(10):19-24.
[7] TAHAMI F,FARHANGI S,KAZEMI R.A fuzzy logic direct yaw moment control system for all wheel drive electric vehicles[J].Vehicle System Dynamics.2004,41(3):203 -221.
[8] KIM D H,KIM J M,HWANG S H,et al.Optimal brake torque distribution for a four wheel drive hybrid electric vehicle stability enhancement[J].Journal of Automobile Engineering.2007,221(D11):1357-1366.
[9] 玄圣夷,宋传学,靳立强,等.基于多级鲁棒PID控制的汽车稳定性控制策略[J].吉林大学学报:工学版,2010,40(1):13-18.XUAN Shengyi,SONG Chuanxue,JIN Liqiang,et al.Multilevel robust PID control strategy for vehicle stability control[J].Journal of Jilin University:Engineering and Technology Edition,2010,40(1):13-18.
[10] YOU Seung-Han,HAHN Jin-Oh,LEE Hyeong-cheol.New adaptive approaches to real-time estimation of vehicle sideslip angle[J].Control Engineering Practice,2009,17(12):1367-1379.
[11] YI K,CHUNG T,KIM J,et al.An Investigation into differential braking strategies for vehicle stability control[J].Journal of Automobile Engineering,2003,217(12):1081-1094.
[12] 唐国元,宾鸿赞.ABS的模糊滑模变结构控制方法及仿真研究[J].中国机械工程,2007,18(13):1630-1632.TANG Guoyuan,BIN Hongzan.Simulation study on fuzzy sliding mode control approach for ABS[J].China Mechanical Engineering,2007,18(13):1630 -1632.
[13] YI Kyongsu,CHUNG Taeyoung,KIM Jeontae,et al.An investigation into differential braking strategies for vehicle stability control[J].Journal of Automobile Engineering,2003,217(12):1081-1093.
[14] 于卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报:自然科学版,2008,36(8):1115-1119.YU Zhuoping,JIANG Wei,ZHANG Lijun.Torque distribution control for four wheel In-wheel-motor electric vehicle[J].Journal of Tongji University:Natural Science,2008,36(8):1115-1119.
[15] CHEN B C,PENG H.Differential braking based rollover prevention for sport utility vehicles with human-in-the-loop evaluations[J].Vehicle System Dynamics,2001,36(4/5):359 -389.
[16] MASAO Nagai,MOTOKI Shino,FENG Gao.Study on integrated control of active front steer angle and direct yaw moment[J].JSAE Review,2002,23(3):309-315.
[17] 熊璐,余卓平,姜炜,等.基于纵向力分配的轮边驱动电动汽车稳定性控制[J].同济大学学报:自然科学版,2010,38(3):417-421.XIONG Lu,YU Zhuoping,JIANG Wei,et al.Research on Vehicle Stability Control of 4WD Electric Vehicle Based on Longitudinal Force Control Allocation[J].Journal of Tongji University:Natural Science,2010,38(3):417 -421.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
中国铁道科学(2015年4期)2015-06-21
航天器工程(2014年5期)2014-03-11
铁道建筑(2010年11期)2010-07-30