直接转矩控制的无刷双馈感应电机的异步启动
2012-01-14 13:02张爱玲许永顺王昕
电机与控制学报 2012年6期
张爱玲, 许永顺, 王昕
(太原理工大学电气与动力工程学院,山西太原030024)
0 引言
和双馈电机(doubly fed induction machine,DFIM)相比,无刷双馈电机(brushless doubly-fed machine,BDFM)由于无刷而受到人们的青睐。在一些特殊的应用领域,例如在风力发电及大功率变速驱动领域BDFM有着明显的技术优势,逐渐显现出取代DFIM的可能性[1-7]。按转子结构的不同BDFM可以分为无刷双馈磁阻电机和无刷双馈感应电机(brushless doubly-fed induction machine,BDFIM)。近5年来BDFIM的控制方法取得了令人瞩目的进步。其中文献[1-3]提出了BDFIM的矢量控制策略,发电[1,3]及电动状态[2]的实验结果证明了控制策略的可行性,并获得了令人满意的稳态及动态性能。文献[4]利用解析表达式深入分析了BDFIM直接转矩控制策略的可行性,且电动状态的实验结果和理论分析十分吻合。上述两种方法均可用于对动态性能要求较高的场合。文献[5]研究了控制绕组相位角控制策略,该方法可用于对动态性能要求不高的风机和泵类负载。
启动方法和启动性能是任何种类电动机的重要性能之一,但是对于无刷双馈电动机启动性能的研究却比较少。文献[2-4]虽然给出了电动状态的实验结果,但并未述及所使用的启动方法。文献[5-6]提出了一种异步启动方法,该方法将启动过程分为异步启动和牵入同步两个阶段,即启动时将控制绕组短接,功率绕组直接接入电网,当电机转速接近同步速时,再将控制绕组接入逆变器使电机双馈运行,转速被牵入同步,文献[5]给出了该方法的实验结果。文献[6]采用反馈线性(feedback linearization)控制方法,文献[7]采用速度开环的v/f控制方式对异步启动及牵入同步的动态过程进行了仿真计算。但文献[5-7]对异步启动过程的电流及转矩均未做理论分析,也未述及如何根据所采用的控制策略改善牵入同步时的动态性能。
深入研究了基于直接转矩控制策略的BDFIM的异步启动方法。利用等效电路分析了异步启动阶段的性能。为了减小牵入同步时两个定子绕组的冲击电流,提出一种磁链优先的控制方法,并在样机上进行实验。
1 异步启动方法
无刷双馈电机在双馈运行方式下的接线图如图1所示,功率绕组接工频电源,控制绕组由交-直-交逆变器供电。
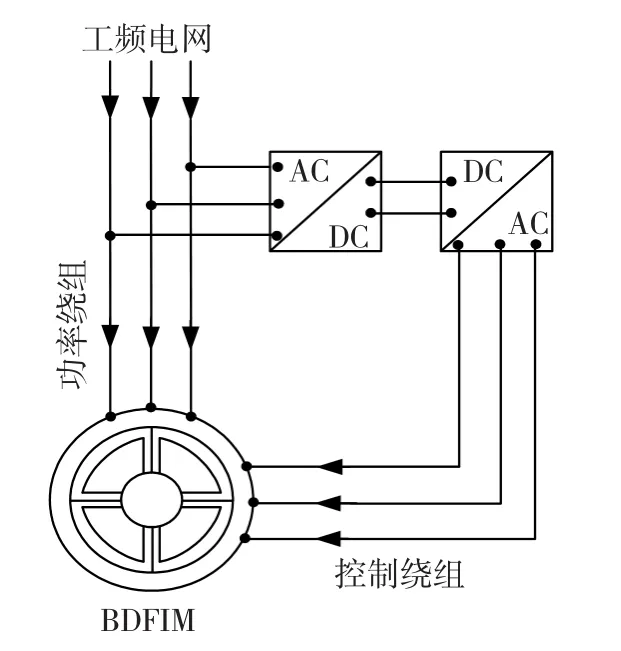
图1 BDFIM运行示意图Fig.1 BDFIM operation
异步启动时,功率绕组接线不变,控制绕组短接(通过逆变器3个导通的下桥臂实现),如图2(a)所示。转速达到同步速附近时,控制逆变器使电机进入双馈运行状态,如图2(b)所示。在合适的控制方式下,转速达到给定值同步运行。
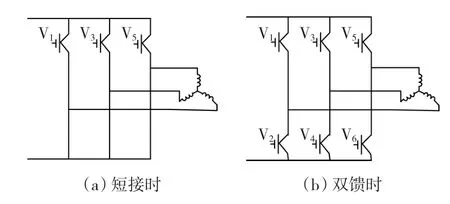
图2 BDFIM控制绕组接线图Fig.2 Configuration of control winding for BDFIM
2 异步启动电流及启动转矩的分析
2.1 异步启动电流的分析
图3为BDFIM的双T型等效电路[8],图中所有参数都已折算到功率绕组,Up,U″c分别为功率绕组和控制绕组电压;Ip,I″c和 I'r分别为功率,控制和转子绕组电流;Rp,R″c,和 Rr分别为功率,控制和转子绕组电阻;Xlp,X″lc,X'lr分别为功率,控制及转子绕组的漏抗;Mp,M″c分别为功率绕组,控制绕组与转子绕组之间的互感;ωp为功率绕组角频率;sp,sc和s为转差率,其表达式为
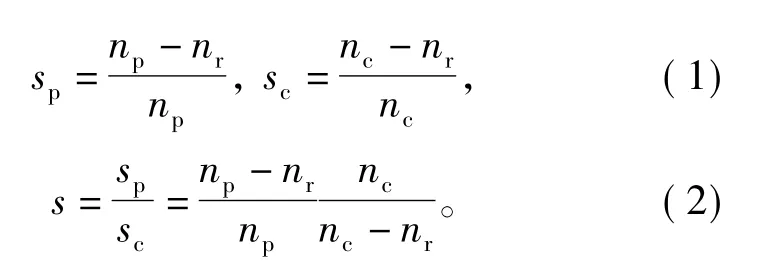
式中:np,nc分别为功率绕组和控制绕组的同步转速,由两个绕组各自的频率决定;nr为转子转速。启动瞬间 nr=0,图3 中 U″c=0,s=sp=1,且由于互感远大于漏感,分析启动电流时可认为Mp和M″c所在的支路断开,则启动瞬间的等效电路如图4所示。
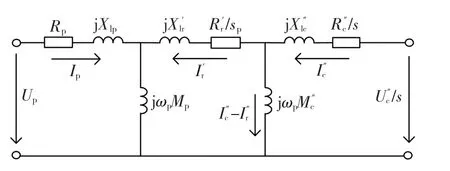
图3 BDFIM的双T型等效电路Fig.3 Double T equivalent circuit for BDFIM
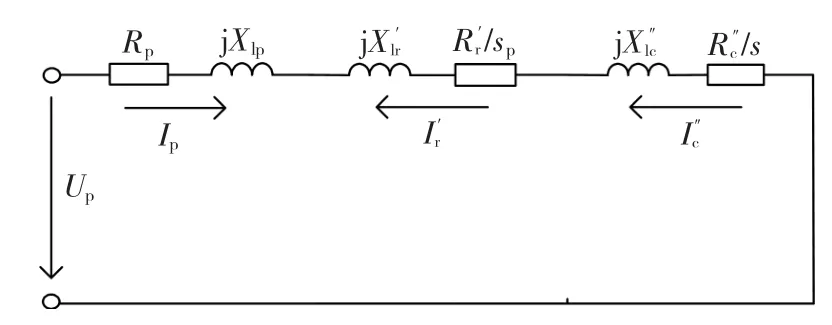
图4 BDFIM的简化等效电路Fig.4 Simplified equivalent circuit for BDFIM
由图4可得启动瞬间功率绕组的电流为

式(3)和感应电机启动电流的表达式相比,式(3)的分母中多了控制绕组的电阻和漏抗,且由于BDFIM的定子槽中嵌放着两个绕组,其漏抗Xlp,X″lc与感应电机相比较大,因此功率绕组启动电流约为同容量感应电机的2/3~1/2。
由图3可知,控制绕组的启动电流为

式(4)中的分子为转子电流引起的控制绕组的感应电势。由式(3)和式(4)可知,在控制绕组中串电阻可以有效减小两个定子绕组的启动电流,但无疑增加了启动设备及启动方法的复杂性。和感应电机一样,随着转速的增加,3个绕组的电流都将减小,达到同步速附近稳定运行时的电流取决于负载,若电机空载,控制绕组稳定时的电流趋于零。
2.2 启动转矩的分析
不计定子电阻时,无刷双馈电机稳态运行时电磁转矩的一般形式[8]为
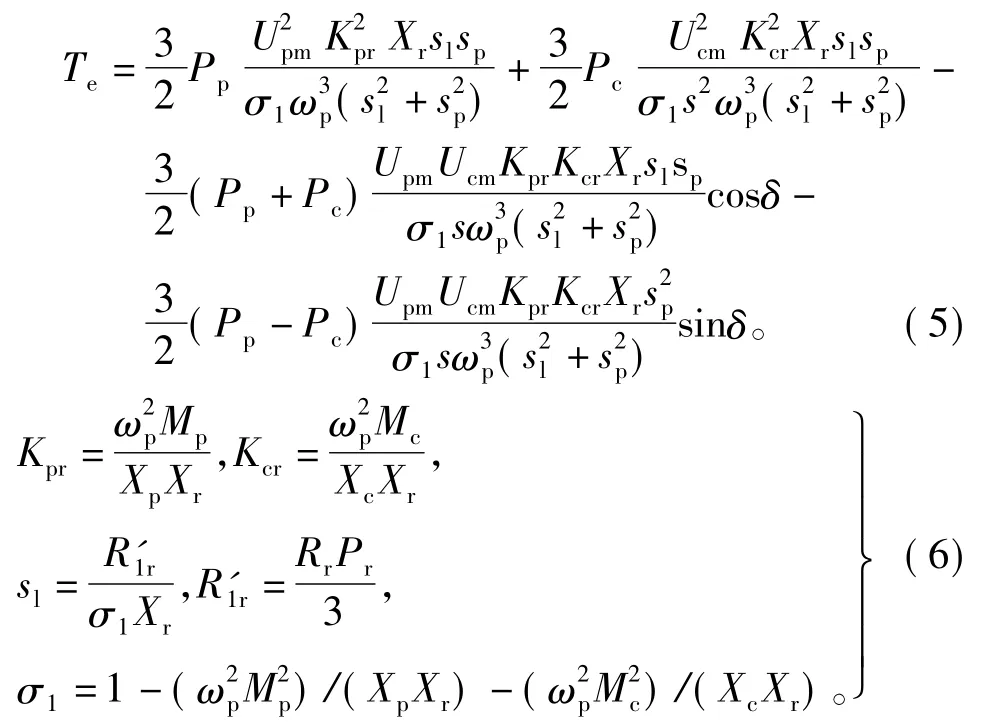
式中:Pp为功率绕组极对数;Pc为控制绕组极对数;Xr为转子电抗;Mc为控制绕组与转子之间的互感;Xp为功率绕组电抗;Xc为控制绕组电抗;Rr为转子电阻;Pr为转子极对数;δ为功率绕组与控制绕组电压之间的夹角;Upm和Ucm分别为功率绕组和控制绕组电压的幅值,以上参数均未进行绕组折算[8]。异步启动时,式(5)中 Ucm=0,sp=1,再将 s1和R'1r代入,则启动转矩为

由式(7)可知,启动转矩和电压的平方及电机参数有关,与感应电机相似。
3 无刷双馈电机直接转矩控制的原理
3.1 基本原理
BDFIM直接转矩控制系统的结构如图5所示[4],功率绕组接380 V工频电源不可控,控制绕组由变流器供电。
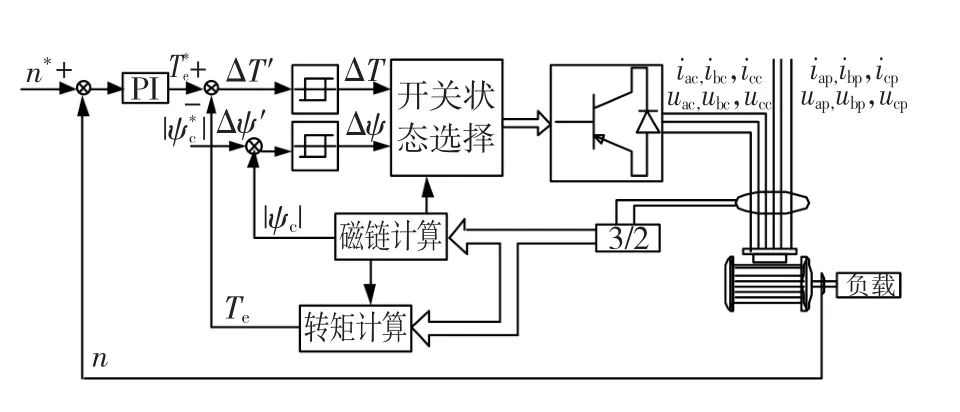
图5 直接转矩控制系统结构Fig.5 Schematic of DTC control for BDFIM
3.2 开关表
系统开关表如表1所示[4]。
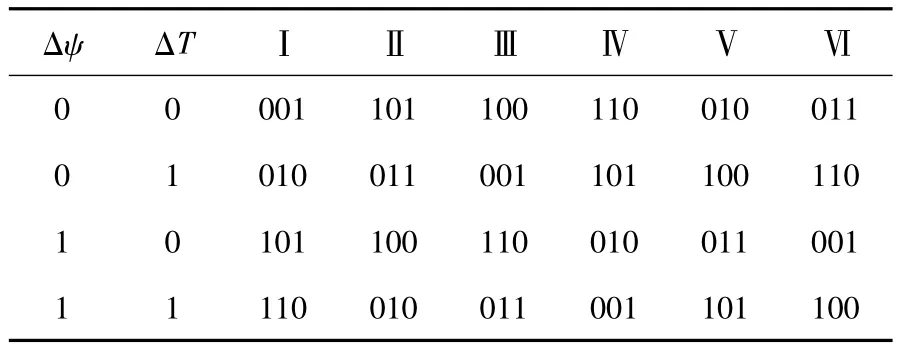
表1 开关表Table 1 Switch table
扇区的划分如图6所示,表1中Ⅰ~Ⅵ为控制绕组磁链所在的扇区,由其 α,β 分量 ψαc,ψβc计算。表1中当ΔT'≥εT时,ΔT=1,表示需要增加转矩,否则,ΔT=0,表示需要减小转矩;同理,当 Δψ'≥εψ时,Δψ =1,否则,Δψ =0。εT,εψ分别为转矩和磁链滞环比较器的环宽。该开关表可以同时满足转矩及磁链增加或减少的需要。
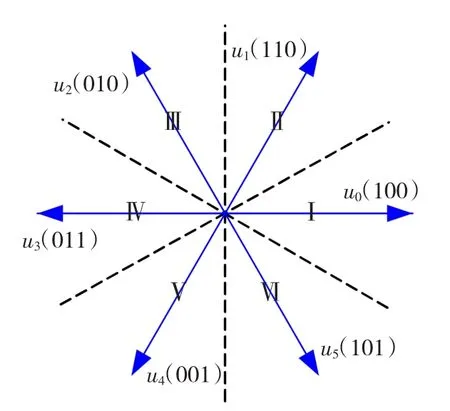
图6 扇区划分Fig.6 The sector partition
4 牵入同步运行
当电机转速接近同步速时,控制逆变器使系统进入双馈运行状态。由于控制绕组由短接改为由逆变器供电时,必然存在磁链的建立过程,同时给定转速与实际转速之间的偏差也必然使ΔT较大。虽然使用表1可以同时兼顾磁链及转矩增加或减小的需求,但是使用如表2所示的磁链优先的开关表进行预励磁,可以在切入双馈的瞬间,使磁链先建立起来,这样可以有效减小切入双馈时的电流,当磁链达到给定的阈值时,再改用开关表1进行控制。
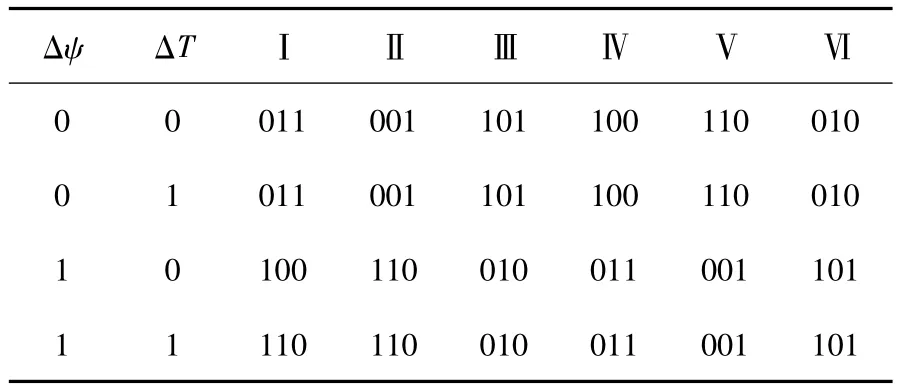
表2 磁链优先开关表Table 2 Switch table with flux priority
磁链优先开关表的设计思想是,当磁链比给定值小很多时,采用与磁链处于同一扇区的空间电压矢量,使磁链快速增加。控制绕组的电压方程[4](在控制绕组坐标系下)为

将式(8)离散化后可得

式中:Uc,ψc和Ic分别为控制绕组电压,磁链及电流的空间矢量;Rc为控制绕组电阻;Ts为采样周期。用矢量三角形描述式(9),如图(7)所示。

图7 定子磁链与电压矢量Fig.7 stator flux and voltage vector
设某一瞬间磁链空间矢量ψc位于第Ⅰ扇区,使用与其位于同一扇区的空间矢量u0,如表2所示,可使电压矢量和磁链的夹角最小,从而使磁链增加最快。同理,采用与磁链间隔两个扇区的空间电压矢量,使磁链减小最多。
5 实验研究
5.1 实验装置
为了验证本文所提方法的正确性,在交流电机实验平台上对BDFIM样机进行异步启动实验。样机采用笼型转子,4组同心式短路线圈,每组5个短路环。功率绕组参数为:3对极;额定功率为3 kW;额定电压为380 V;额定电流为6.9 A。控制绕组参数为:1对极;额定电压为380 V;额定电流为3.4 A;同步转速为750 r/min。
实验平台如图8所示,直流发电机作为BDFIM的负载,扭矩传感器用来测量BDFIM的输出转矩,使用OMRON增量式E6C2-CWZ6C光电编码器测量转速,由霍尔电流传感器测量电流。
实验中功率绕组接380 V工频电源,控制绕组接双PWM变流器,图9为其结构示意图。两个变流器的控制系统相似,图中只画出电机侧变流器控制系统。数字信号处理芯片(digital signal processor,DSP)TMS320LF2407A是控制系统的核心,其通讯接口CAN及PC机的USB接口通过USBCAN接口卡相连,实现DSP与PC机之间的数据交换。例如,转速及磁链等给定值可以由PC机发送到DSP,电流、转矩等采样值及计算值也可以由DSP发送到PC机。实验中系统采样周期Ts=280 μs,CW磁链给定

图8 实验装置Fig.8 Experimental setup
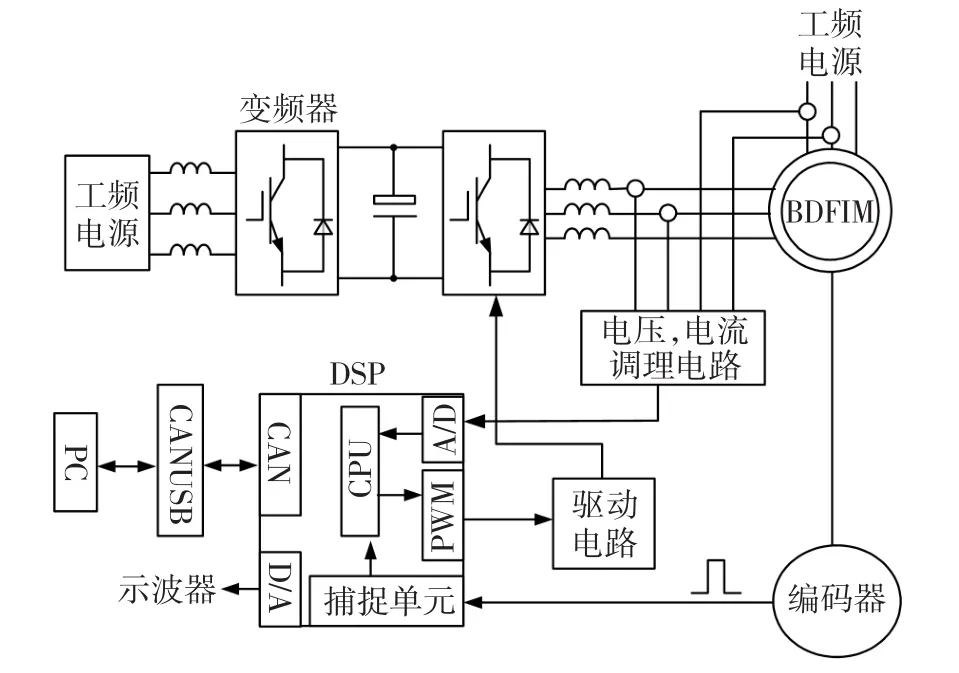
图9 变流器结构Fig.9 Schematic diagram of the converter
5.2 实验结果
5.2.1 异步启动阶段的实验结果
图10(a)~图10(d)分别为额定电压下空载异步启动时控制绕组、功率绕组电流,转速及电磁转矩的波形。其中功率绕组电流的峰值为17.5 A,约为其额定电流峰值的2.34倍。控制绕组电流的峰值为11.5 A,约为其额定电流峰值的2.48倍,两个绕组的电流均随着转速的上升衰减。由于电机空载,控制绕组的电流稳态时接近零,转速接近同步速即750 r/min;启动瞬间,电磁转矩波动较大,原因有待进一步分析。
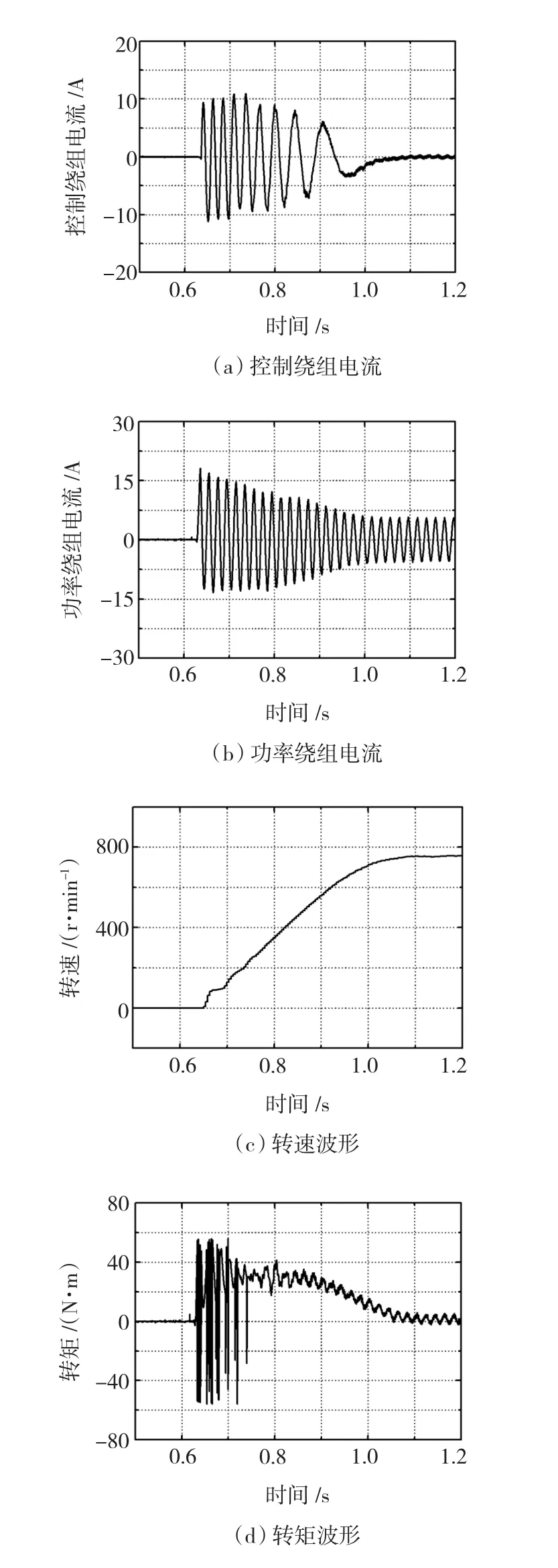
图10 启动时的实验结果Fig.10 Experimental results for starting
5.2.2 牵入双馈运行的实验结果
电机由异步牵入双馈时,将采用表1和磁链优先两种控制方法的实验结果进行对比。采用后一种方法当控制绕组磁链达到0.92 Wb时,开关表切入表1。两种方式下,给定转速均为795 r/min,其他实验条件相同,图11为由异步牵入超同步的实验结果。
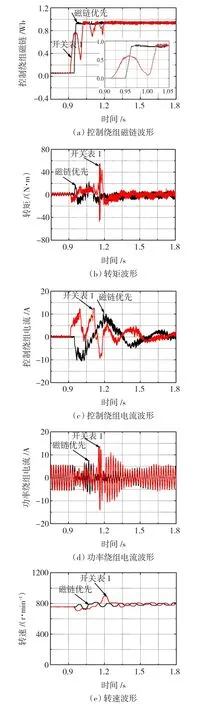
图11 从异步牵入超同步的实验结果Fig.11 Experimental results from asynchronous to synchronous model
由图11(a)可知,采用磁链优先方法时,磁链单方向平稳增加,达到给定值的时间约为25 ms;由图11(b)可知,两种方法下,电磁转矩的大小没有明显区别,这是由于建立磁链所需的时间很短;由图11(c)和图11(d)可知,采用磁链优先方法时,两个定子绕组的电流明显减小。另外采用如表1所示的控制方式,在接近1.2 s时,由于磁链的跌落,引起功率绕组电流、转速和转矩的振荡。实验结果表明,当磁链比给定值小很多时,优先控制磁链会取得较好的控制效果。
6 结语
本文利用稳态等效电路分析了BDFIM异步启动时的电流,理论分析和样机的实验结果表明,额定电压下的直接启动电流小于同容量的感应电机。为了减小牵入同步时两个定子绕组的冲击电流,提出了一种磁链优先的控制方法,样机的实验结果验证了所提控制方法的有效性。
[1] SHAO Shiyi,EHSAN A,FARHAD B,et al.Stator-flux-oriented vector control for brushless doubly fed induction enerator[J].IEEE Transactions on Industry Electronics,2009,56(10):4220 -4228.
[2] POZA J,OYARBIDE E,SARASOLA I,et al.Vector control design and experimental evaluation for the brushless doubly fed machine[J].IET Electric Power Applications,2009,3(4):247 -256.
[3] KOSTYANTYN P,DEWEI X.Modeling and control of brushless doubly-fed induction generators in wind energy applications[J].IEEE Transactions on Power Electronics,2008,23(3):1191-1197.
[4] SARASOLA I,POZA J,RODRIGUEZ M A,et al.Direct torque control design and experimental evaluation for the brushless doubly fed machine[J].Energy Conversion and Management,2011,52(2):1226-1234.
[5] SHAO Shiyi,ABDI E,MCMAHON R.Operation of brushless doubly-fed machine for drive applications[C]//4th IET International Conference on Power Electronics,Machines and Drives,PEMD 2008,April 2 -4,2008,York,United kingdom.2008:340 -344.
[6] DING Feng,ROBERTS P,RICHARD M.Control study on starting of BDFM[C]//41st International Universities Power Engineering Conference,UPEC 2006,September 6-8,2006,Newcastle upon Tyne,United kingdom.2006:660-664.
[7] 邓先明,张海忠,拾华杰.笼型转子无刷双馈电机启动特性分析[J].电机与控制学报,2008,12(5):545-549.DENG Xianming,ZHANG Haizhong,SHI Huajie.Analysis of starting characteristics of cage-rotor brushless doubly-fed machine[J].Electric Machines and Control,2008,12(5):545 - 549.
[8] 章玮.无刷双馈电机系统及其控制研究[D].杭州:浙江大学电气工程学院,2001.
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年2期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
云南电力技术(2015年2期)2015-08-23
电测与仪表(2015年16期)2015-04-12
大电机技术(2015年5期)2015-02-27