
改进型BP网络PID在电动舵机控制中的应用*
2011-12-10 02:22周长省
弹箭与制导学报 2011年6期
张 元,周长省,郑 健
(南京理工大学机械工程学院,南京 210094)
0 引言
弹用电动舵机目前大都使用无刷直流电动机(BLDCM),传统的BLDCM系统一般采用PID控制,但面对复杂的非线性系统,PID参数不易整定[1]。BP网络属于前馈型人工神经网络,可以根据在线信息的正向传播、误差反向传播、记忆(权值)训练和学习收敛四个过程,在线修正连接权,使误差沿梯度方向下降,最后使控制进入稳定状态。
文中采用BP神经网络的PID对电动舵机进行转角位置控制,并在此基础上进行了改进。仿真结果表明,改进后的BP神经网络PID控制方法反应快,无超调,与传统PID控制方法相比具有更好的动静态性能、控制精度以及鲁棒性。
1 电动舵机的数学模型
文中以“120°导通型”开关方式为例,分析电动舵机的数学模型。为了便于分析,假定[3]:
1)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称;
2)忽略齿槽、换相过程和电枢反应等的影响;
3)电枢绕组在定子内表面均匀连续分布;
4)磁路不饱和,不计涡流和磁滞损耗;
5)转子上无阻尼绕组,永磁体也不起作用。
根据基尔霍夫电压定律得定子各相的电压方程为:

式中:ua、ub、uc为定子相绕组电压;ea、eb、ec为定子相绕组的电动势;ia、ib、ic为定子每相 绕 组 的电流;r1为定子每相绕组的电阻;Ls为定子每相绕组的自感;Lm为定子任意两相绕组之间的互感。
由于定子绕组采用星型连接,且无中线,故有:

于是有:

将式(2)代入式(3)得无刷直流电动机数学模型的状态空间表达式为:

式中:L1=Ls-Lm为定子每相绕组的等效电感;p为微分算子,p=d/dt。
电磁转矩方程:

式中:Tem为电机提供的转矩;ω为电机转速。
动力学方程:

式中:TL为负载转矩;J为折算到电机轴上总的转动惯量。
2 BP神经网络PID控制器设计
基于BP网络的PID控制器结构如图1所示,控制器由两部分构成,其中经典的PID控制器直接对被控对象进行闭环控制,并且3个参数kp、ki、kd为在线调整方式;而在线调整的任务由BP网络完成,即根据系统运行的实时数据rin(k),yout(k),error(k)按照BP算法调节PID控制器的参数kp(k)、ki(k)、kd(k),以达到性能指标的最优化。其中BP网络的结构如图2所示,BP网络设置为3层,网络结构为
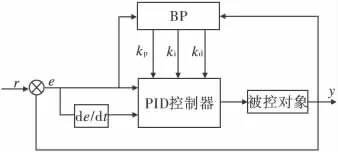
图1 基于BP网络的PID控制器结构

图2 BP神经网络结构
2.1 控制算法
基于BP网络整定PID控制的算法描述如下[4]:
1)确定BP网络的结构,即确定输入层节点数和隐含层节点数,并确定各层加权系数的初值w(1)ij(0)和,选定学习速率的初值η,此时k=1;
2)采样得到rin(k)和yout(k),计算误差error(k)=rin(k)-yout(k);
3)计算BP网络各层神经元的输入、输出,输出层的输出即为PID控制器的三个可调参数kp、ki、kd;
4)根据PID的控制算法,由PID参数kp(k)、ki(k)、kd(k),计算PID控制器的输出u (k)及Δu (k);
6)置k=k+1,返回到2)。
2.2 局限及改进
BP网络由于其很好的逼近非线性映射的能力,因而它可用于信息处理、图像识别、模型辨识、系统控制等多个方面。对于控制方面的应用,其很好的逼近特性和泛化能力是一个优点[5]。而收敛速度慢却是一个缺点,这一点难以满足具有适应功能的实时控制的要求,文中就BP算法的缺点提出了两点改进:
1)加惯性项。为了使收敛速度更快,可在加权系数修正公式中增加一个惯性项,使加权系数变化更平稳。故可改为:

式中:α为惯性系数。
2)加比例系数。由于可调参数kp、ki、kd均取非负的Sigmoid函数,其值在(0,1)之间,使得本算法的应用具有局限性,故加入一个比例系数k,使kp、ki、kd可以在更大的范围内调整,变为:

3 仿真研究
文中采用的电动舵机参数为:额定功率120W,额定转矩0.062N·m;额定转速15600r/min;额定电压24V;额定电流4.75A;转动惯量8.91g·cm2;转矩常数0.013N·m/A;机械时间常数1.59ms;每相电阻0.329Ω;每相电感0.0308mH;磁极对数2;相数3。给电机一个20°的偏转信号,仿真结果见图3~图6。

图3 常规BP网络PID阶跃响应曲线

图4 传统BP-PID参数变化曲线

图5 阶跃响应曲线对比

图6 改进BP-PID参数变化曲线
从仿真结果可以看出,对于常规BP网络PID控制器(见图3),由于受到参数kp、ki、kd在(0,1)之间的限制,对电机转角信号响应很慢,误差跟踪能力很差,调节时间达到了9s,远远不符合电机转角控制的要求。常规PID控制器(见图5)虽然上升时间很快,但上升有震荡,而改进型的BP网络PID控制器改善了这些不足,通过图5和图6可以看出,PID参数变化的范围更大,上升时间更快,动态性能更好。
由此证明,基于无刷直流电机的转角控制,对传统BP网络PID控制器的改进是行之有效的。
4 结论
文中设计了一种改进的BP神经网络PID控制系统,实现了对电动舵机的位置控制。针对传统算法的不足,对其进行了改进,加入了惯量项和比例系数,通过仿真对比发现,该方法响应快、超调量小、鲁棒性强,动态特性明显优于传统PID控制。
在BLDCM这类高度非线性系统中,采用神经网络是极有前景的,它具有提高系统快速性、稳定性和鲁棒性的潜力。神经网络作为人工智能控制的重要分支,将会在实际中获得更加广泛的应用。
[1]K J Astrom,T Hagglund.The future of PID control[J].Control Engineering Practice,2001,9(11):1163-1175.
[2]王凌,刘卫国.基于模糊PI控制的无刷直流电机调速系统仿真[J].计算机仿真,2009,26(10):186-189.
[3]曹菁,朱纪洪.电动舵机模糊自适应PID控制研究[J].微电机,2007,40(10):89-92.
[4]刘金琨.先进PID控制 MATLAB仿真[M].2版.北京:电子工业出版社,2001.
[5]李国勇.智能预测控制及其 MATLAB实现[M].2版.北京:电子工业出版社,2010.
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
微特电机(2020年11期)2020-12-30
电子制作(2018年1期)2018-04-04
电子制作(2017年1期)2017-05-17
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
舰船科学技术(2015年8期)2015-02-27
