超短基线定位原理及校正方法研究
2011-09-24 08:11王德刚韩富江来向华苟诤慷傅晓明
海洋科学 2011年2期
王德刚, 韩富江, 来向华, 苟诤慷, 傅晓明
(国家海洋局 第二海洋研究所, 浙江 杭州 310012)
超短基线定位原理及校正方法研究
王德刚, 韩富江, 来向华, 苟诤慷, 傅晓明
(国家海洋局 第二海洋研究所, 浙江 杭州 310012)
通过探讨超短基线和 GPS技术相结合的三维立体定位原理, 分析超短基线定位误差来源, 如安装偏差、声速误差、船姿态变化引起的偏差等, 利用以最小二乘法为理论基础的动态校正法对超短基线定位误差进行了修正, 将校正前后的定位数据标准偏差和剩余偏差处理后对比发现, 这种方法可以极大地提高水下目标定位的精度, 减少定位的误差, 这也在实际应用中得到验证。实现对超短基线定位数据的有效校正将极大地扩展超短基线在海洋科学研究和海洋勘探开发活动水下定位领域的应用,对提高水下目标的定位精度具有重要的现实意义。
超短基线系统; 水下定位; 误差分析; 动态校正
近年来, 随着海洋科学研究和海洋勘探开发活动对数据的精度要求越来越高, 需要对水下工作的拖体(声纳拖鱼、水下机器人等)进行精确定位。当前主要采用两种手段进行水下定位, 一种是LAYBACK方式[1], 方法较简单, 但定位效果不理想,主要由于拖体与 GPS天线的方位和距离偏差受船速、航向和流速等因素影响较大; 另一种是利用水声技术进行水下定位, 可以达到较高的精度要求。
高精度水下声学定位系统是许多高新技术的集成, 根据基线长度的不同以及工作原理和作用范围的区别, 可以分为长基线(long base line)、短基线(short base line)和超短基线(ultra short base line, 简称USBL) 3种定位技术[2]。长基线方法定位精度高,但设备庞大, 布放过程复杂; 短基线定位方法的设备和布放较简单, 但精度不高; 超短基线水声定位系统以其成本低、便携性强、灵活性高和操作简单等优点,在海洋工程、海洋矿产资源、水下考古、海洋国防建设等领域中得到了广泛的应用。由于超短基线定位存在一定的偏差而影响水下目标定位的精度, 为减小超短基线的定位误差, 本文利用以最小二乘法为理论基础的动态校正法对定位数据进行了处理, 通过实例验证这种方法是有效和可行的, 对提高水下目标定位的精度具有重要的意义。
1 超短基线系统定位原理
超短基线定位系统由发射基阵、应答器、接收基阵组成。收发基阵安装在同一探头上, 应答器固定在水下拖体上。系统通过测定声单元的相位差来确定换能器到目标的相对方位角; 换能器与目标的距离通过测定声波传播的时间, 再用声速剖面修正波束线, 最终确定声基阵与水下拖体目标的相对距离,从而确定目标的相对位置(图1)。
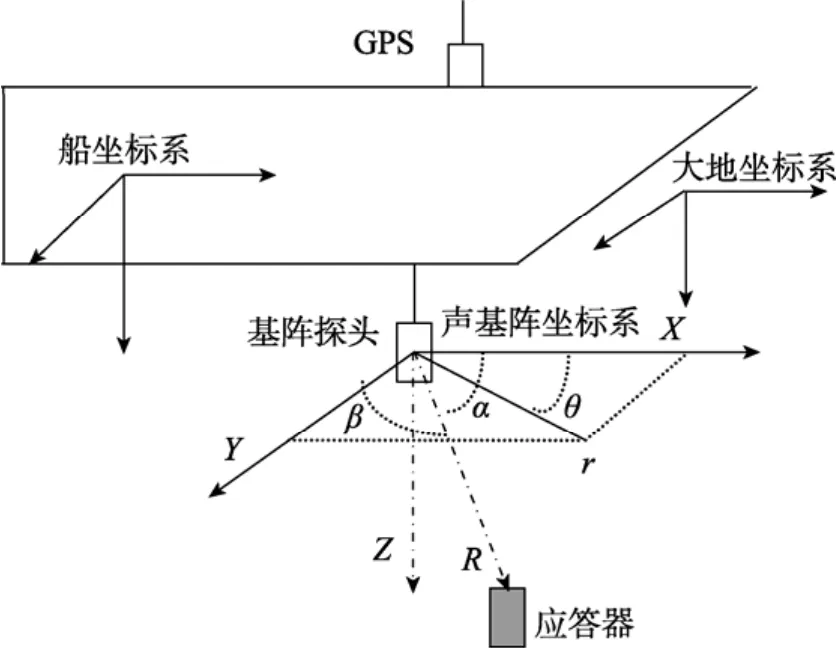
图1 超短基线水下定位原理图及坐标系统Fig. 1 USBL underwater positioning schematic diagram and related coordinate systems
基阵坐标系中,θ为目标方位角,r为目标水平斜距,α,β,R为测量值, 可计算目标的相对位置参数[3]:
超短基线定位系统要测量水下目标的绝对位置(地理坐标), 需将超短基线系统与DGPS系统、船姿态传感器系统及电罗经系统结合在一起(图 2), 其中DGPS系统用于测得船只所在位置大地坐标, 运动传感器和电罗经用于获取测量船每个时刻的横摇(roll)、纵摇(pitch)及船艏向(yaw)资料, 用于实时校正超短基线的姿态, 安装后需精确测量各个传感器之间的三维距离, 根据传感器之间的位置关系, 进行坐标转换, 最终可实现水下运动拖体的三维实时高精度定位。
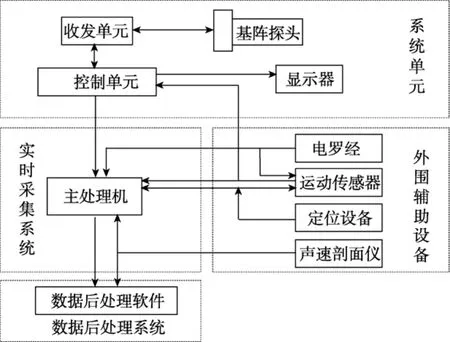
图2 超短基线水下定位系统框架图Fig. 2 USBL underwater positioning system frame diagram
在整个集成系统中需建立 3个坐标系, 大地坐标系、船坐标系及声基阵坐标系(图1)。以向下与船甲板垂直方向为Z轴, 船艏方向为X轴, 依照右手原则建立船坐标系, 且船坐标系与声基阵坐标系原点为同一点, 这样可避免坐标的平移产生, 有利于下文的计算与坐标转换。声基阵探头在船坐标系中的值为再利用船上罗经和运动传感器可得到的横摇角αm、纵摇角mβ、船航向角mλ, 声基阵探头在大地坐标中的位置计为根据坐标旋转原则[4]确定声基阵大地坐标值为:
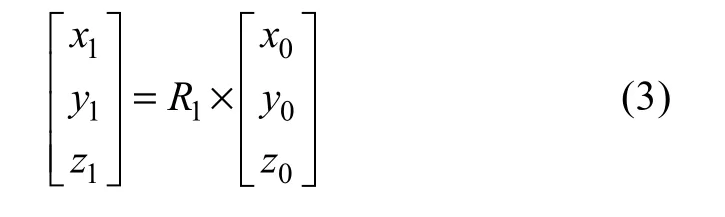
其中
在声基阵探头理想安装状态下, 利用 USBL定位结果及水下运动目标的方位角, 通过式(3)可将水下目标的位置信息转换到大地坐标系统中, 得到水下目标的绝对位置。
2 误差分析与系统校正
2.1 误差分析
影响超短基线定位系统精度的主要因素有系统自身误差、海洋环境参数测量误差、波浪引起的船姿态偏差及声学基阵带来的偏差等[5]。
声学基阵探头、DGPS、电罗经等仪器本身的绝对误差, 按照仪器相关校正方法进行校正即可; 海洋环境参数测量误差主要是水体声速剖面的变化所引起的距离测量偏差, 需使用声速剖面仪得到工作水域的声速变化曲线, 在计算水下目标距离时进行校正; 船姿态引起的偏差校正,主要是利用运动传感器测量得到船横摇、纵摇及电罗经得到的船艏向数据, 实时校正由于波浪引起的船姿态变化对基阵探头的影响。需要特别指出的是, 声学基阵安装偏差是超短基线定位系统的主要误差来源, 在使用前必须进行校正。
2.2 系统校正
超短基线定位系统的声学基阵在测量船上安装是有方向性的, 由于在安装时, 基阵坐标系与船心坐标系之间不可能完全重合, 存在系统性偏差, 要保证获取高精度的定位数据, 必须进行校准改正。根据基阵安装偏差的方向可以分为横向偏差(roll error)、纵向偏差(pitch error)和船向偏差(yaw error) (图3)。
声基阵安装偏差校正应在工作区域附近进行,将应答器(信标)连接重块释放到海底, 以应答器的位置为圆心, 水深为半径, 设计6条测线, 测线的长度一般为水深的2~3倍(图4), 安装声学基阵探头的船只按照设计的 6条测线的顺序航行, 船在航行时尽量保持固定航向, 当船到达测线起点时, 开始记录数据, 这样可以在每个航迹位置确定基阵坐标下的应答器位置, 同时要记录航迹位置处的 DGPS位置信息和船姿态数据。
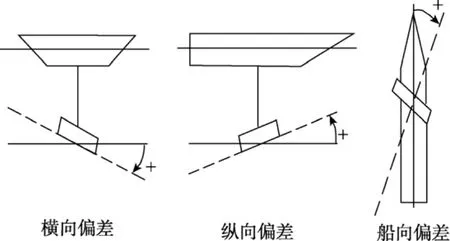
图3 超短基线声基阵安装偏差Fig. 3 The installation errors of USBL probe
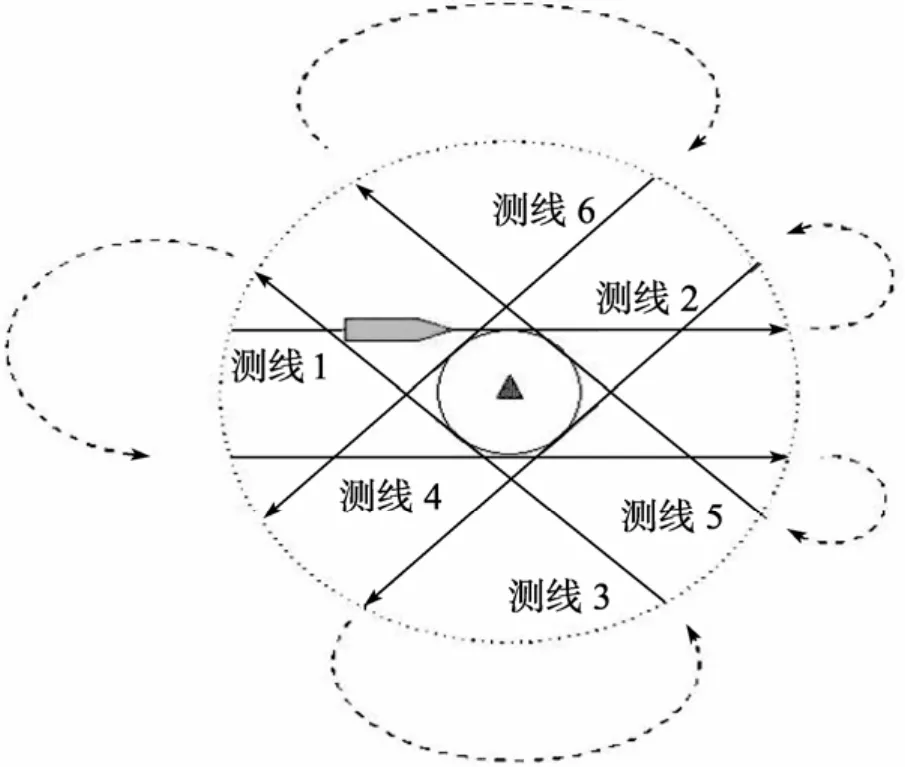
图4 超短基线安装校正测线布设图Fig. 4 The lateral line diagram of USBL installation correction
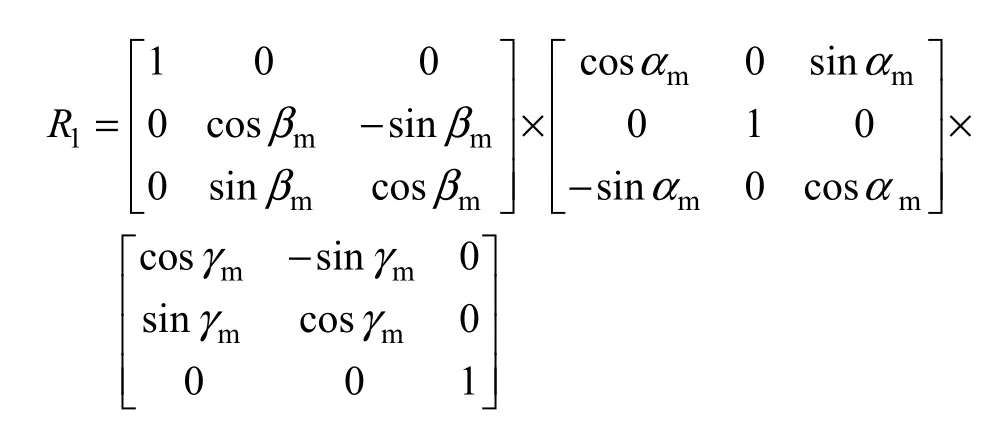
R1为声学基阵向大地坐标变换的旋转矩阵,R2为声学基阵坐标系向船坐标系转换的旋转矩阵。其中:
为安装偏角的旋转矩阵, (α,β, )γ分别为声基阵安装的横向偏差、纵向偏差及船向偏差。
由最小二乘法可以得到由探头安装偏差所带来的旋转矩阵R2, 即可求出姿态角的偏差(α,β, )γ[6-8]。
3 实例分析
国家海洋局第二海洋研究所承担的亚洲内环海底光缆系统海洋路由调查项目中, 使用了HIPAP350P超短基线定位系统用于侧扫声纳拖鱼的水下定位。在南海工作区域, 利用上述方法对超短基线的安装偏差进行了校正, 总共采集数据918组,使用数据772组, 占整个数据的84%, 利用上述系统动态校正方法得到以下结果: 超短基线的横向偏差 为 −0.952°, 纵 向 偏 差 为 2.136°, 船 向 偏 差 为3.584°。
将校正后和校正前的定位数据对比(图5)可以发现, 校正后的数据偏差都集中在零点附近, 通过数理统计可得X,Y,Z的标准偏差分别为4.31, 4.31和5.87 m, 由剩余偏差统计图可得知其基本服从标准正态分布, 校正效果良好。其后工作中利用校正的HIPAP350P进行水下侧扫声纳拖鱼的定位, 通过多种资料对比结果表明, 其定位效果良好, 这也证明了该校正方法的有效性。
4 结论
超短基线水声定位系统和差分式全球卫星定位系统(DGPS)组成的测量系统可以有效地解决水下和海底目标的高精度定位问题。整个系统的构成简单, 操作方便,测距精度高, 不需要组建水下基线阵; 系统的主要缺点是仍需要做大量的校准工作, 测量目标的绝对位置精度依赖于外围设备精度——全球差分定位系统(DGPS)、电罗经(GYRO)、运动传感器(VRU)等。但随着多种类型基线集成使用系统(如超短基线和短基线、长基线组合定位)、多传感器集成技术的出现(如法国 IXSEA公司的GAPS 超短基线系统, 探头内集成了罗经、运动传感器等设备)及更优秀的数据处理算法[9](如卡尔曼滤波算法)的使用, 确保了系统数据的高精度, 可以更大限度的发挥超短基线在水下目标位置定位中的应用。
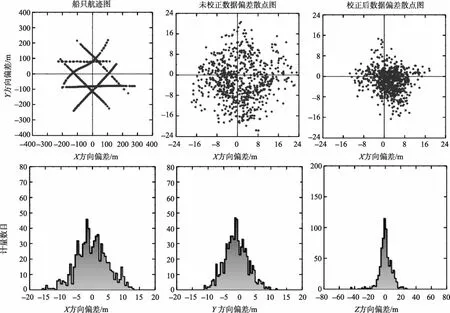
图5 安装偏差校正结果统计图Fig. 5 The stacistical graph of installation error correction
[1] 隋海琛, 刘彦祥, 姜晓晖. 海洋调查中水下目标位置的确定[J]. 海洋测绘, 2004, 24(3): 32-34.
[2] 李守军, 包更生, 吴水根. 水声定位技术的发展现状与展望[J].海洋技术, 2005, 24(1): 130-135.
[3] 喻敏, 惠俊英, 冯海泓, 等. 超短基线系统精度改进方法[J]. 海洋工程, 2006, 24(1): 86-91.
[4] 张炜, 王大成. 水下和海底大地坐标的精确测量[J].应用科技, 2003, 30(9): 19-21.
[5] Philip D R. An evaluation of USBL and SBL acoustic systems and the optimisation of methods of calibration[J].The Hydrographic Journal, 2003, 108:10-25.
[6] 郑翠娥, 孙大军, 张殿伦, 等. 超短基线定位系统安装误差校准技术研究[J]. 计算机工程与应用, 2007,43(8): 171-173.
[7] Takuji Y, Masataka A. Error evaluation in acoustic positioning of a single transponder seafloor crustal deformation measurements[J].Earth, Planets and Space,2002, 54(9): 871-881.
[8] Angelis C M, Whitney J. Adaptive calibration of an autonomous underwater vehicle navigation system [J].IEEE, 2000, 1: 273-275.
[9] 郭纪捷. 水下拖体声学超短基线定位测量及其卡尔曼滤波技术[J]. 海洋技术, 2002, 21(1): 7-11.
Received: Aug., 3, 2009
Key words:ultra short base line; underwater positioning; error analysis; dynamic correction
Abstract:Three dimension location theory based on USBL and GPS principle was discussed and also the resources of USBL positioning data errors such as installation error, acoustic error and the error caused by ship attitude movement were analyzed in the paper. Dynamic correction which based on the least square method was used to modify the USBL positioning errors. Comparing the standard deviation and residual analyzed on the pre and post positioning data, the method improved the underwater positioning precision to a great extent which was proved in practice. The application of USBL positioning data modification in effect would expand the USBL usage in the marine investigation science area and also had important practical significance in the improving of underwater positioning precision.
(本文编辑:刘珊珊)
The localization theory and corresponding correction methods of USBL
WANG De-gang, HAN Fu-jiang, LAI Xiang-hua, GOU Zheng-kang, FU Xiao-ming
(Second Institute of Oceanography, State Oceanic Administration, Hangzhou 310012, China)
P229
A
1000-3096(2011)02-0077-05
2009-08-03;
2010-12-13
国家自然科学基金资助项目(40476032); 国家海洋局第二海洋研究所基本科研业务费专项(JG0911, JG0913)
王德刚(1981-), 男, 山东德州市人, 硕士, 主要从事海洋工程地球物理技术研究, E-mail: DeGang_W@163.com
猜你喜欢
科学(2020年5期)2020-11-26
国学(2020年1期)2020-06-29
中国惯性技术学报(2019年3期)2019-10-15
水下无人系统学报(2018年5期)2018-11-09
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
弹道学报(2016年4期)2016-12-14
舰船电子对抗(2016年5期)2016-12-13
西北工业大学学报(2015年3期)2015-12-14
航天器工程(2014年5期)2014-03-11