
两弹塑性粗糙表面的非赫兹接触
2011-03-07 11:26:28田红亮朱大林秦红玲
三峡大学学报(自然科学版) 2011年1期
田红亮 朱大林 秦红玲
(三峡大学机械与材料学院,湖北宜昌 443002)
1 赫兹接触理论的1个缺陷
在自然界中,从几微米的粉粒和黏粒到几米的巨石,颗粒大小跨越了106量级[1],颗粒间作用力发生了本质变化.在微米量级,将出现很多传统宏观接触理论无法解释的现象,比如零外载时接触面的塑性屈服,以及接触过程中的突跳现象等,就是由于两颗粒界面上原子、分子尺度范围内的表面力引起了表面黏连、接触、变形等;在宏观尺度米的量级上,颗粒间表面作用力与弹性力相比则非常微弱,通常不予考虑,如Hertz接触理论把颗粒间接触作用按照静态弹性接触进行处理,得到了颗粒间圆形接触面积与弹性变形的关系,为颗粒曲面接触问题提供了理论基础.
山田昭夫和角張毅[2]提出了接触结合部的实验、理论解析方法.金永辉[3]对两组挠性梁结合部的动态特性进行了试验,通过试验,得到如下结论:在通常大小的预紧力下,具有结合部的梁的固有频率比对应无结合部梁的固有频率明显地小,并且随着结合部预紧力的增大使固有频率相应增大至一稳定值,但相对的增量并不大,尤其是对第二阶固有频率更是如此. Tian等[4]首次解释虚拟材料假设的概念,对机械结构固定结合部进行了动力学建模.国家制定了2006~2020年的国家中长期科学和技术发展规划纲要[5].根据国家自然科学基金委员会(National Natural Science Foundation of China)工程与材料科学部的统计资料,摩擦学领域获得资助的重大项目“先进电子制造中的重要科学技术问题研究”(第一负责人丁汉,承担单位上海交通大学,批准金额800万元)中,相当部分内容属于摩擦学研究[6];国家重点基础研究发展计划(National Basic Research Program of China)973项目“数字化制造基础研究”(2005~2010年).值得注意的是,以上2个项目均涉及如何识别机床结合部动力学特性参数的问题.
接触力学起源于1882年赫兹发表的经典论文《论弹性固体的接触》.赫兹接触理论作了4个假设: (1)表面连续光滑、非同曲;(2)应变小;(3)接近接触区时,每个固体都视为半空间弹性体;(4)表面无摩擦.根据赫兹接触理论的第3个假设,赫兹假设粗糙峰为椭圆体或球体.其中球体粗糙峰模型接触区压力分布为椭圆,如图1(a)所示.根据图1(a),赫兹应力在中心区域为有限值(实际情况是近似于点接触,应力趋于无限),在边缘为零(实际情况为应力略微大于零).因此赫兹接触理论的第1个缺陷是局限于椭圆体或球体半空间弹性体.圆锥体粗糙峰模型接触区压力分布如图1(b)所示.根据图1(b),应力在中心区域趋于无限,在边缘略微大于零.因此圆锥体模型比较接近实际,可用于摩擦磨损计算.
田红亮[7]认为在偏润滑带内(0≤d*≤3),粗糙峰开始相互作用,产生接触,表高标准差发挥重要作用,但没有考虑偏润滑带外的情形.本文考虑偏润滑带外的情形(3≤d*≤5),在任意粗糙峰的具体力学和几何特性情形下,给出了两粗糙表面的通用接触关系式,对圆锥体两表面的塑性接触进行分析.
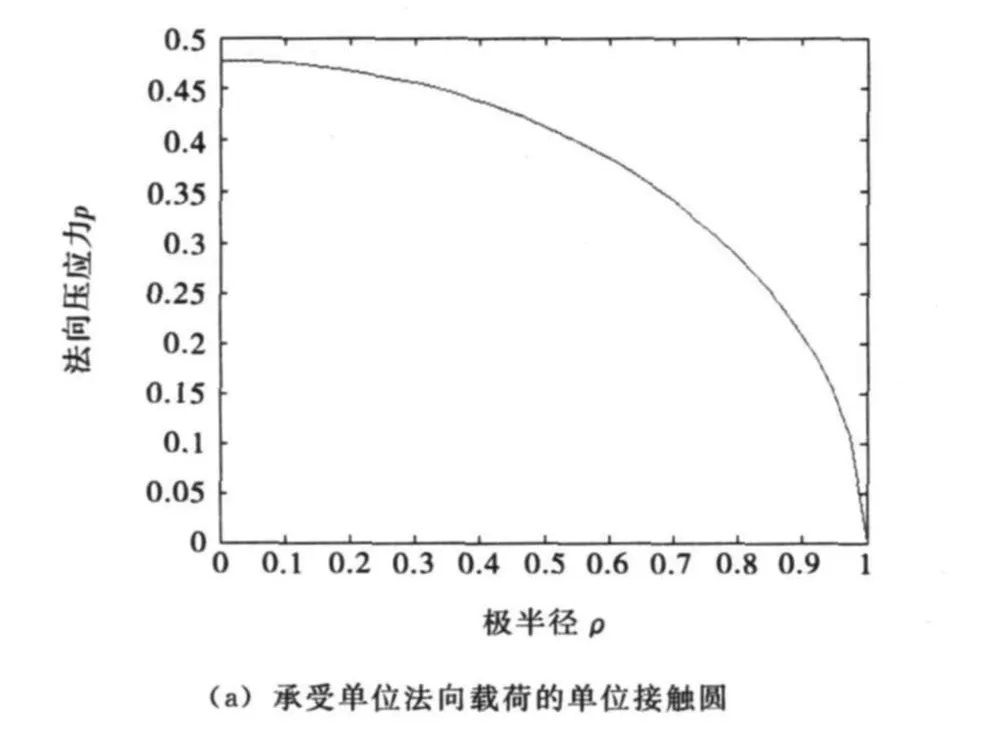

图1 两种粗糙峰模型的法向压应力与极半径关系
2 两表面的弹性接触
位于r、r+dr之间且峰高在z2、z2+dz2范围内的接触点数为

式中,η为微凸体面密度;r为两微凸体的水平距离;φ (z2)为峰高z2的概率密度.
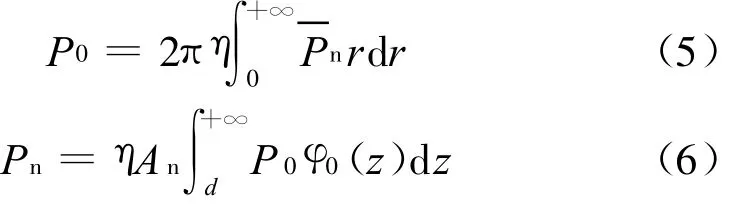
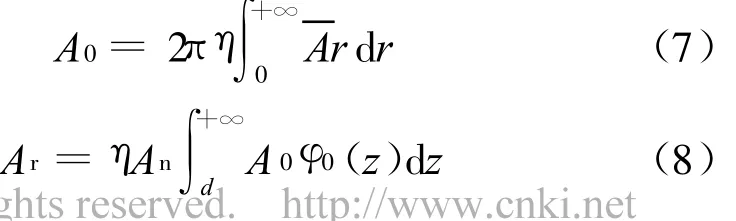
由式(1)可得每个接触点承受的数学期望法向载荷为

由式(2)可得两表面承受的数学期望总法向载荷为

或

式中,z=z1+z2;φ0(z)为峰高z的概率密度.
式(4)可改写为
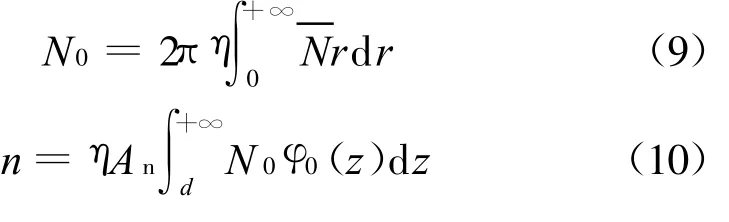
同理可得数学期望总实际接触面积、数学期望总接触点数分别为
由赫兹接触理论可得单峰承受的弹性载荷、单峰的实际接触面积、单峰的接触点数分别为

式中,E′为两接触粗糙表面的复合弹性模量;w= wp-r2/(4R)为单峰的局部干涉量,wp=z-d为两粗糙峰的垂直重叠量,下标p表示粗糙峰(peak);R为单个粗糙峰的曲率半径;Re=R/2为两表面的等效粗糙峰曲率半径,下标e表示等效(equivalent);〈〉为Macauley尖角括号[8].

将式(11)代入式(5),得
将式(15)代入式(6),得

式中,β=η Rσ为量纲一的粗糙度参数,0.02≤β≤0.08;σ为两接触表面峰高的复合标准差.

当粗糙表面峰高z的概率密度为高斯分布时,式(18)可改写为高斯分布积分[9].
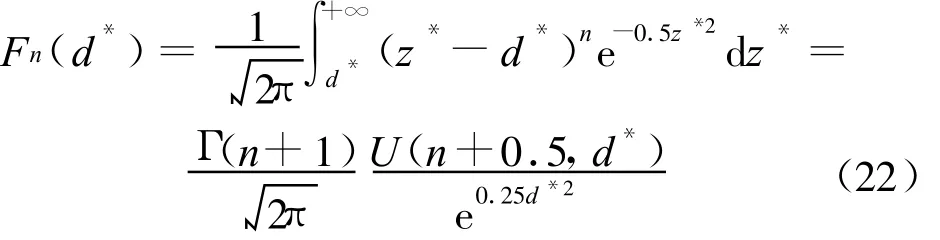
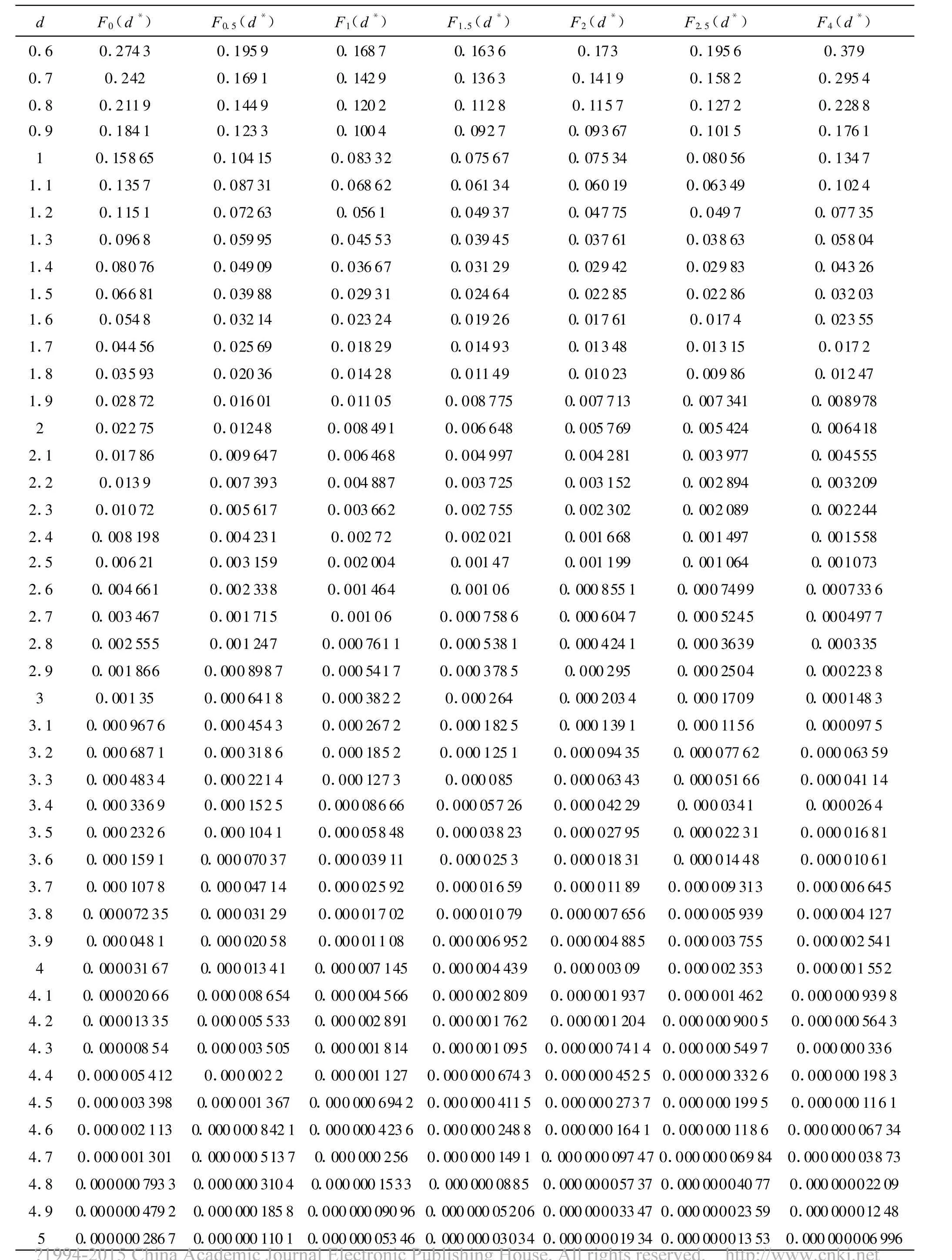
根据表1可计算高斯分布积分(22),其51组共357个离散值见表2.
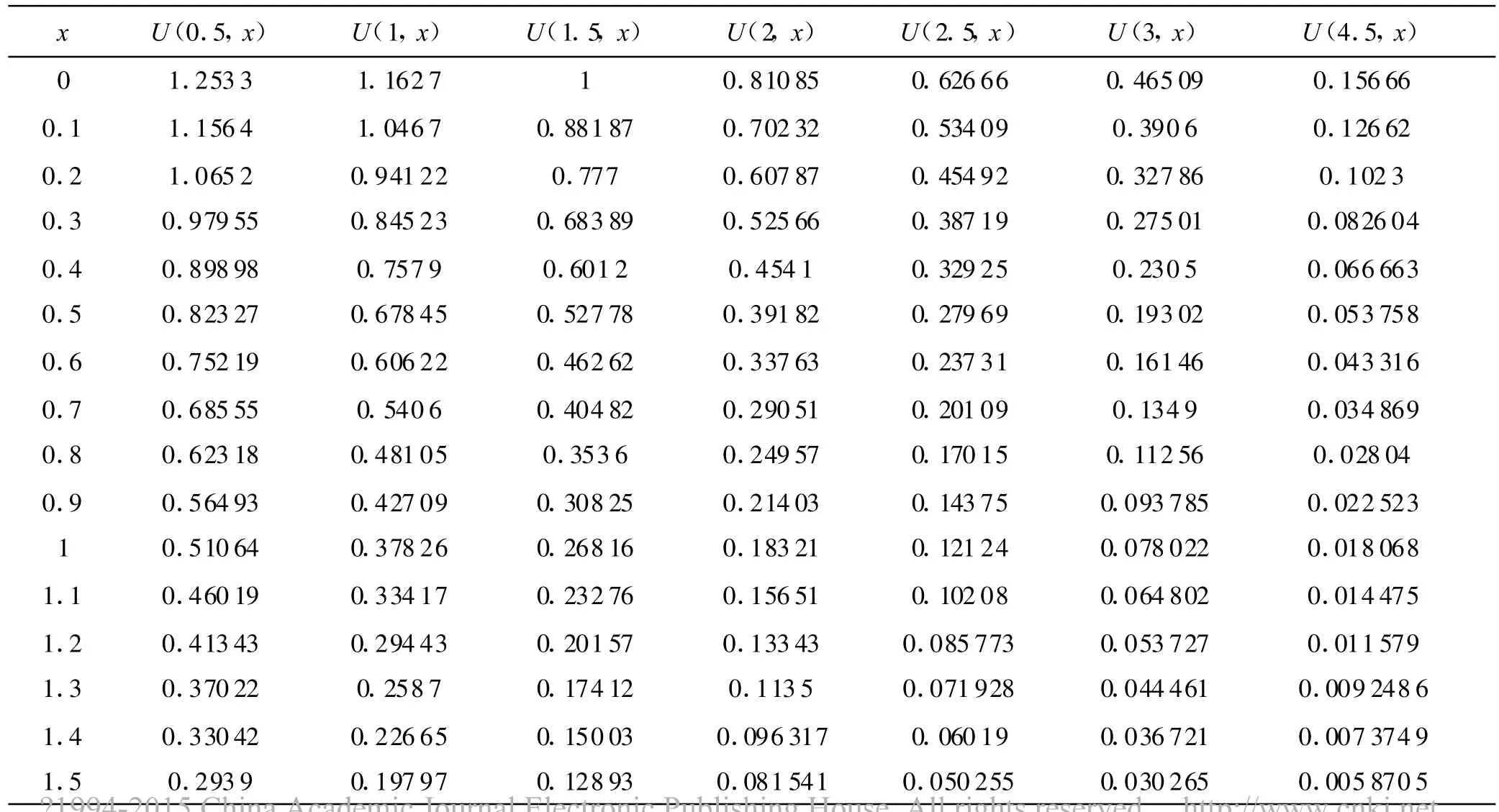
表1 韦伯抛物柱面函数的离散值
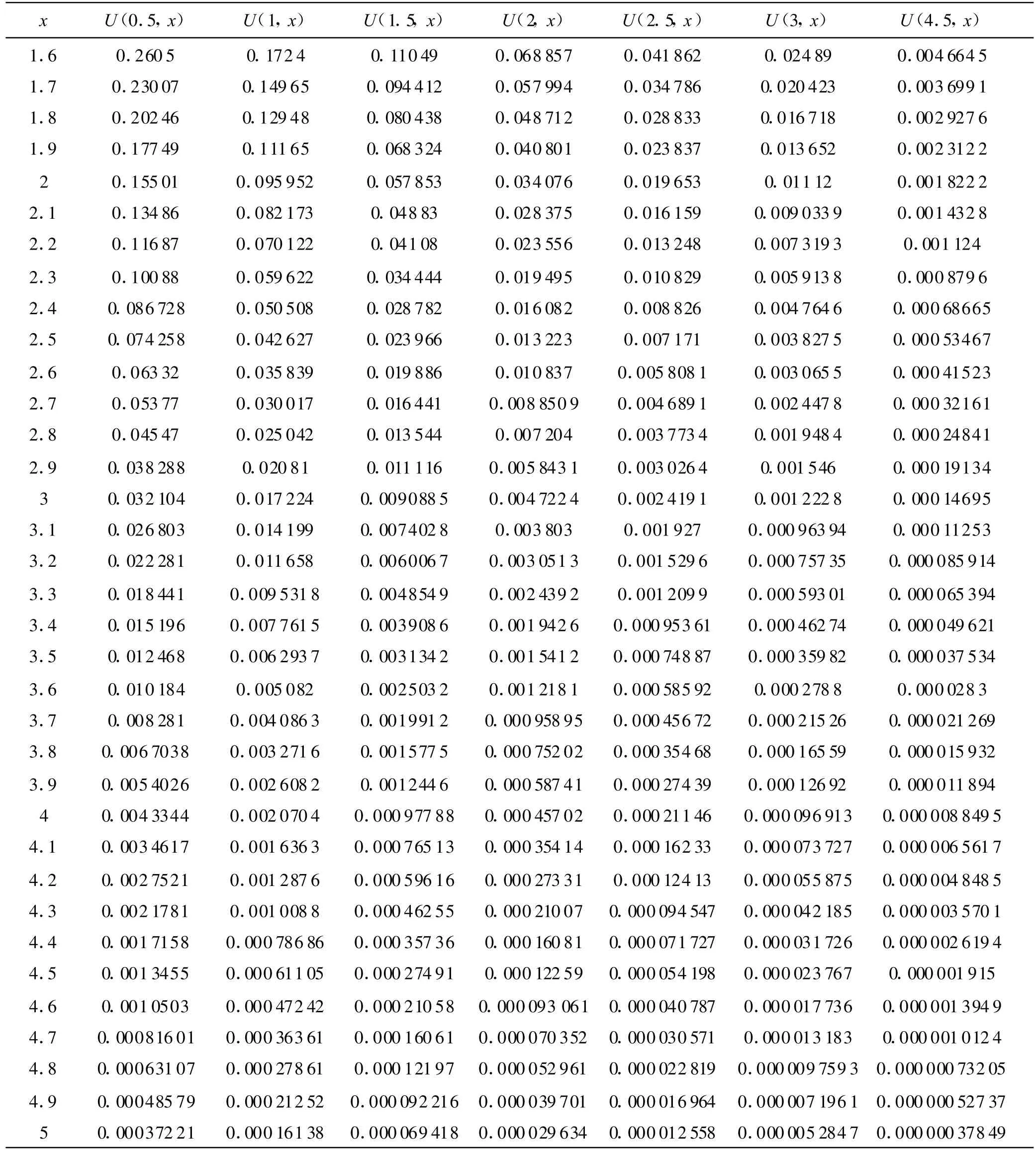
续表1 韦伯抛物柱面函数的离散值

表2 高斯分布积分的离散值
续表2 高斯分布积分的离散值
将式(12)代入式(7),得

将式(23)代入式(8),可得数学期望总实际接触面积为

式中,下标r表示实际(real).
将式(13)代入式(9),得

将式(25)代入式(10),可得数学期望总接触点数为

当β=0.05,弹性接触时量纲一的间距-量纲一的接触点数n*=n/(η An)关系如图2所示.根据图2,本文解与GW模型[14]的预测情形较接近.

图2 弹性接触时量纲一的间距-量纲一的接触点数关系
2.1 两粗糙表面的接触
由式(17)可得两粗糙表面接触的名义压应力为


2.2 一等效表面与一刚性表面的接触
由式(11)得

将式(28)代入式(6),可得一等效表面与一刚性表面接触的名义压应力为

式中,下标ne表示名义(nominal)等效(equivalent).
2.3 一粗糙表面与一刚性表面的接触
由式(29)可得一粗糙表面与一刚性表面接触的名义压应力为

当β=0.05,K=1000kgf/cm2,弹性接触时量纲一的间距-名义压应力关系如图3所示.根据图3,两粗糙表面接触和一等效表面与一刚性表面接触相比,前者量纲一的间距较小.

图3 弹性接触时量纲一的间距-名义压应力关系
当β=0.05,K=1000kgf/cm2,弹性接触时量纲一的实际接触面积(A*r=Ar-An)-名义压应力关系如图4所示,其中第4条曲线表示当实际接触压应力pr=Pn/Ar=0.3E′σ/R时的情形.根据图4,两粗糙表面接触、恒定实际接触压应力皆与GW模型的预测情形很接近;除了第3种情形外,实际接触面积与名义压应力近似成正比.

图4 弹性接触时量纲一的实际接触面积-名义压应力关系
3 两表面的塑性接触
3.1 弹性球两表面的塑性接触
实际塑、弹性接触面积之比随塑性指数的变化如图5所示.根据图5,当塑性指数ψ<0.6,接触表面发生弹性变形;当塑性指数ψ>1,接触表面发生塑性变形.

图5 实际塑、弹性接触面积之比随塑性指数的变化
当塑性指数ψ<0.6,可忽略实际塑性接触面积,弹性球两表面承受的数学期望总塑性载荷[15]为

由式(31)可得弹性球量纲一的名义压应力为

式中,下标nes表示名义(nominal)弹性(elastic)球(sphere).
3.2 塑性球两表面的塑性接触
由赫兹接触理论可得单峰承受的塑性载荷为

式中,H为两表面较软材料的硬度.
将式(33)代入式(5),得

将式(34)代入式(6),得

由式(35)可得塑性球量纲一的名义压应力为

3.3 圆锥体两表面的塑性接触
圆锥体单峰的水平截面是椭圆[16],该椭圆的长半轴、短半轴[17]分别为

式中,α为圆锥体单峰边的斜角度.

由式(37)、(38)可得圆锥体单峰承受的塑性载荷为

将式(40)代入式(5),得

将式(41)代入式(6),得

将式(39)代入式(42),可得圆锥体量纲一的名义压应力为

式中,下标nc表示名义(nominal)圆锥体(cone).
当β=0.05,塑性接触时量纲一的间距-名义压应力关系如图6所示.根据图6,当量纲一的名义压应力较大时,塑性球两表面的塑性接触与圆锥体两表面的塑性接触的预测情形很接近.在这3种预测情形中,圆锥体两表面的塑性接触模型的间距最小,能实现金属的气密性.

图6 塑性接触时量纲一的间距-量纲一的名义压应力关系
4 结 语
通过分析,获得了两粗糙表面的通用接触关系式.当塑性指数ψ<0.6,接触表面发生弹性变形;当塑性指数ψ>1,接触表面发生塑性变形.对于任意粗糙峰的具体力学和几何特性,实际接触面积与名义压应力近似成正比.两粗糙表面接触、一等效表面与一刚性表面接触的预测情形很接近.圆锥体两表面的塑性接触模型的间距最小、接触紧密,容易实现金属的气密性.参考文献:
[1] 孙其诚,王光谦.颗粒物质力学导论[M].北京:科学出版社,2009:15.
[2] 山田昭夫,角張毅.接触結合部PHもxiiittりffl動特性推定[J].精密工学会誌,1986,52(12):2051-2057.
[3] 金永辉.机床固定结合部动态特性的研究[D].杭州:浙江大学,1988:35-39.
[4] Tian Hongliang,Li Bin,Liu Hongqi,et al.A New Dynamic Modeling Approach to Fixed Joint Interface in Machine Tools[C].Proceedings of 2010 International Conference on Mechanical and Electrical Technology. Singapore:Institute of Electrical and Electronics Engineers,2010:718-721.
[5] Wen Jiabao.Science and China's Modernization[J].Science,2008,322(5902):649.
[6] 周仲荣,雷源忠,张嗣伟.摩擦学发展前沿[M].北京:科学出版社,2006:7.
[7] 田红亮.两弹塑性接触粗糙表面的静密封流量[J].机械设计与制造,2010,228(2):57-58.
[8] 刘鸿文.材料力学(Ⅱ)[M].4版.北京:高等教育出版社,2004:12-15.
[9] McCOOL John I.Comparison of Models for the Contact of Rough Surfaces[J].Wear,1986,107(1):37-60.
[10]Abramowitz M ilton,Stegun Irene A.Handbook of Mathematical Functions With Formulas,Graphs,and Mathematical Tables[M].4th Printing.Washington: United States Department of Commerce,1965:685-720.
[11]Darwin C G.On Weber's Function[J].The Quarterly Journal of Mechanics and Applied Mathematics,1949,Ⅱ:311-320.
[12] Miller J C P.On the Choice of Standard Solutions to Weber's Equation[J].Proceedings of the Cambridge Philosophical Society,1952,48:428-435.
[13]Watson G N.A Theory of Asymptotic Series[J].Philosophical Transactions of the Royal Society of London, 1912,A211:279-313.
[14]Greenwood J A,Williamson J B P.Contact of Nominally Flat Surfaces[J].Proceedings of the Royal Society of London,Series A Mathematical and Physical Sciences, 1966,295(1442):300-319.
[15]田红亮,朱大林,秦红玲.两弹性接触粗糙表面的最小二乘法拟合解[J].三峡大学学报:自然科学版,2009,31 (3):62-66.
[16] Horng Jeng Haur.An Elliptic Elastic-Plastic Asperity Microcontact Model for Rough Surfaces[J].Journal of Tribology,1998,120(1):82-88.
[17]Greenwood J A,Tripp J H.The Contact of Two Nominally Flat Rough Surfaces[J].Proceedings of the Institution of Mechanical Engineers,1970-1971,185(48): 625-633.
猜你喜欢
大理大学学报(2023年6期)2023-07-11 04:45:14
物理通报(2022年6期)2022-05-27 09:43:14
机械工程与自动化(2020年5期)2020-11-05 10:56:32
五金科技(2020年5期)2020-10-31 14:41:34
——以匀加速直线运动公式为例
经济师(2020年8期)2020-08-18 13:19:36
优雅(2020年5期)2020-06-24 03:08:33
数学物理学报(2020年2期)2020-06-02 11:29:18
学报编辑论丛(2018年0期)2018-02-21 20:14:21
合作经济与科技(2015年22期)2015-08-09 01:24:00
四川师范大学学报(自然科学版)(2015年3期)2015-02-28 14:07:59
