
FAST无线式索力传感器节点的设计制作与测试*
2011-01-25 01:25王启明李建斌
天文研究与技术 2011年1期
周 毓,王启明,李建斌
(1.中国科学院国家天文台,北京 100012;2.中国科学院研究生院,北京 100049)
经过历时14年的预研,由我国天文学家提出的500 m口径球面射电望远镜FAST(Five-hundredmeter Aperture Spherical radio Telescope)项目于2007年7月通过了国家发改委审核,被列入为国家重大科技基础设施建设项目,并于2008年12月在贵州省平塘县大窝凼举行了工程奠基仪式[1]。此项目是“十一五”国家重大科技基础设施建设项目,具有包括500 m球冠状主动反射面在内的3项重要自主创新成果[2],建成后的FAST将成为世界上最大的单口径射电望远镜。
FAST主动反射面的主体结构包括促动器装置、索网结构、反射面结构和周边支撑结构4部分;其中起到支撑反射面的周边结构和实现主动变形功能的索网结构如图1。FAST反射面索网结构的划分方式主要有短程线型网格划分、四边型网格划分和凯威特型网格划分等[3]。无论采用哪种具体的划分方式,FAST索网结构都将由大量的主索单元组成。以短程线型网格为例,主索单元总数约7000根,索单元长度为10~12 m;另外还有2 300根下拉索。

图1 FAST反射面整体索网结构示意图[4]Fig.1 Illustration of the structure of cable net for the FAST reflector
在FAST主动反射面建设期间,索网结构的张拉是一个分阶段连续的过程,其结构的受力状态也是一个连续的过程。上一阶段的结构内力和位移必然会对下一阶段的内力和位移产生影响,因此需要对每个阶段的内力和位移进行跟踪计算,准确计算结构的内力和位移的积累效应[5]。此外,建成后的FAST在运行期间,反射面结构工作在持续往复运动状态,大部分索内应力处于较高水平,随着时间的推移,索单元容易产生松弛、疲劳、破损等现象,因此需对结构长期性能进行监测和诊断,以评估反射面工作性能并提出相应修正措施[6]。基于上述需求,对FAST索网结构主索单元应力状态的实时和长期监测在整个FAST项目的生命周期内显得十分重要。
根据不同的原理,测量索力的方法有很多种,如通过应变传感器测量、压力传感器测量、索测力计测量、频率法测量、基于拉索静态线形的索力测定等[7]。频率法测索力是目前索力测定中应用最广泛的方法,其原理是首先通过振动测试,识别索的振动频率;由于索力与其振动频率之间存在着特定的关系,索力可由频率换算间接得到。
针对FAST索网结构的巨大尺度,传统的有线式传感器网络有其自身的劣势。FAST索网结构的检测任务需要对大量特征点进行监测,如果采用有线式传感网络,则需要布置相应的线缆来完成信号的传输工作。这大大提高了施工建设成本和运行维护成本,也增加了日后长期监测工作中产生故障的几率;而无线传输方式则能够克服有线式传感器网络的这些不足。在索网结构的施工建设期间,项目可以采用工作在ISM(工业、科学、医疗)通信频段的无线模块,无需单独申请频点。
本文基于频率法测量索力的原理,利用微重力加速度计等电子元件设计制作了一种小型化、低成本的FAST无线式索力传感器,并对其性能进行了测试。
1 频率法测索力的原理
利用弦振动理论可得到主索拉力与其自振频率之间的关系[8]。在考虑抗弯刚度的情况下,斜拉索的动力平衡微分方程为:

式中w为单位长度索重;g为重力加速度;y为垂直于斜拉索长度方向的坐标;x为斜拉索长度方向的坐标;EI为斜拉索的抗弯刚度;T为斜拉索的张力;t为时间。
在索两端是铰支的情况下,张力公式为:

式中L为斜拉索的索长;fn为斜拉索的第n阶自振频率;n为振动阶数。
若不考虑抗弯刚度的影响,则简化的斜拉索拉力为:

对于某根确定的索,式中的w、L、g均为已知量,如果能精确测量第n阶自振频率fn,便可以精确得到索力T。研究表明[9],对于60 m以内的短索,可取基频带入简化公式,并视不同情况乘以折减系数来测量索力。频率法测索力在工程领域有着较为成熟的运用。史家钧[10]等使用频率法对曼谷Rama IX斜拉桥的斜拉索索力进行测定,验证了频率法的可靠性。张亮[11]等对长度为19 m的索进行实验,证明频率法测量索力的方案切实可行。
由于FAST索网结构索单元长度、安装方式等都较为一致,索力计算可以在(3)式的基础上,通过实验来估算修正系数,以获得频率与索力的对应关系。
2 传感器的设计与实现
根据频率法测索力的原理,对索单元振动频率的精确测量是关键。无线索力传感器测量索单元时域振动加速度大小,通过无线传输模块将数据传输给上位机(必要时同时完成本地存储),上位机通过FFT识别各阶振动频率,通过(3)式完成索力的计算。无线索力传感器主要由加速度传感单元、微处理器单元、无线传输模块和电源模块组成。整个系统结构如图2。

图2 FAST索力测试无线传感器网络结构示意图Fig.2 The wireless sensor network for testing the FAST cable tensions
2.1 加速度传感单元
加速度传感单元采用飞思卡尔半导体公司推出的三轴微重力电容式加速度计MMA7260。此芯片可以感知三轴向最大6g的加速度信号。MMA7260整个芯片由两个微机械结构的电容式传感单元(GCell)和一个信号调理专用集成电路组成,其功能结构如图3。X,Y,Z 3个方向上的加速度信号由GCell传感单元感知,信号经过容压变换、增益放大、滤波以及温度补偿处理后以电压形式在XOUT、YOUT、ZOUT管脚输出[12]。

图3 MMA7260功能框图Fig.3 Functional block diagram of the MMA7260
MMA7260芯片提供了±1.5g,±2g,±4g和±6g 4种加速度测量范围供用户选择。通过设置不同的量程,MMA7260提供不同的测量灵敏度;当选择±1.5g测量范围时,芯片测量灵敏度达到800 mV/g。MMA7260内部固有采样频率为11 kHz;芯片集成了单极点开关电容滤波器,会产生时钟噪声,需要在MMA7260的3个输出引脚加上RC滤波电路。
MMA7260加速度计具有很低的功耗,非常适合文中采用电池供电的无线式索力传感器。芯片提供快速启动和休眠模式,它的电压范围为2.2~3.6 V,消耗电流500μA;在休眠模式下电流消耗仅为 3μA。
2.2 微处理单元及外部存储模块
ATMega16L是ATMEL公司开发的8位低功耗微处理器,在系统中处理上位机发来的指令,实现对外围电路的控制。通过自带的8路10位ADC通道,微处理器可以采样MMA7260的三轴电压输出信号,即加速度时域信号。ATMega16L提供了丰富的通讯接口,通过USART接口与无线收发模块进行数据交换;通过SPI接口与外部数据存储器完成采样结果的存储和读取;通过TWI接口控制时钟芯片,以提供传感器节点本地时间。通过设置微处理器输出比较寄存器的值,芯片的定时器可以实现不同的采样率,从而在定时器的中断服务程序中完成模数转换和数据发送功能,以完成在反射面索网建设期间的索力监测任务。
在射电望远镜运行时,需要对索网进行健康监测,为了保证电磁环境,数据传输不能在观测期间进行,可以利用望远镜更换观测目标期间完成数据的无线传输,之前的采样结果数据可先做本地存储。由于健康监测是一个长期的工作,需要存储的数据量较大,采用大容量的非易失性的Micro SD卡作为数据存储器可以满足设计需求。SD卡存储器工作在3.3 V电压,可以通过SPI总线与微控制器相连,接口电路非常容易。
2.3 无线模块
为简化设计和提高传输正确率,系统中无线功能采用SRWF-1021无线数传模块来完成。SRWF-1021提供433/470/868/915 4种载波频率供选择;该模块基于GFSK/FSK的调制方式,采用高效前向纠错信道编码技术,具有较高的抗干扰能力和低误码率。在433 MHz,9 600 bps的工作模式下,SRWF-1021有效传输距离可达500 m,可以满足FAST项目传输距离上的要求。
SRWF-1021无线数传模块提供TTL、RS232和RS485 3种接口方式。微处理单元采集到的数据通过模块COM1的TTL电平UART接口以无线信号发出;无线模块的接收端在收到数据后则通过COM2的RS232接口将信号送到上位机进行后期处理。该无线模块接口简单,方便以后无线模块的升级和更换。
2.4 系统的软件设计
系统的数据处理程序存储在微控制器中,主要包括对加速度信号的采集和数据的无线传输。系统上电后,自动完成一系列初始化工作,具体包括串口的初始化、计数器的部分初始化、模数转换模块的初始化以及外围时钟、存储芯片等的初始化。完成初始化后,系统等待上位机命令,为了节约能耗,无线模块定时间断开启。系统软件设计主要功能的流程如图4。
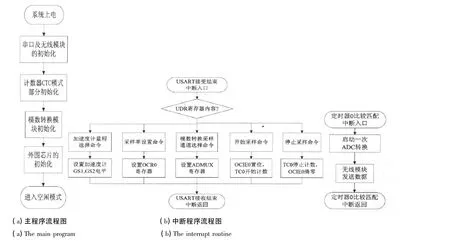
图4 程序流程图Fig.4 Flowcharts of the programs
3 传感器节点样机的测试
制作完成的无线索力传感器如图5。
实验后期在索力测试实验台上对FAST无线式索力传感器节点的性能进行了测试。实验台高2.35 m,上端固定一台触动器用来提供拉力以张紧待测钢索。实验钢索为长度1.53 m的一根钢绞线,钢绞线直径10 mm,外层PE护套直径13 mm,上下两端各有20 cm长索头,上端索头与触动器的丝杆铰接,下端索头通过自制连接件与上海天沐自动化仪表有限公司的NS-WL1系列拉压力传感器相连。实验时,通过触动器电机带动蜗轮丝杆升降机以张紧钢索,下端的拉压力传感器测量索内应力,通过相连的数字仪表显示相应索内应力的大小,整套装置如图6。

图5 FAST无线式索力传感器Fig.5 A wireless cable tension sensor for the FAST

图6 索力测试实验平台Fig.6 Experimental platform of the cable tension test
实验中,同时使用了江苏东华测试技术有限公司的DH-5922动态信号测试分析系统进行了对比实验。动态信号测试分析系统的有线式加速度计通过蜂蜡直接粘贴在钢索表面;而自制的无线索力传感器则通过一对钢丝绳卡头固定在索上。在索受到不同张力情况下,给予轻微的激励信号,测定在不同索张力下的振动频率。图7为8.148 kN索张力条件下轻微激励后钢索振动的时域和频域信号。
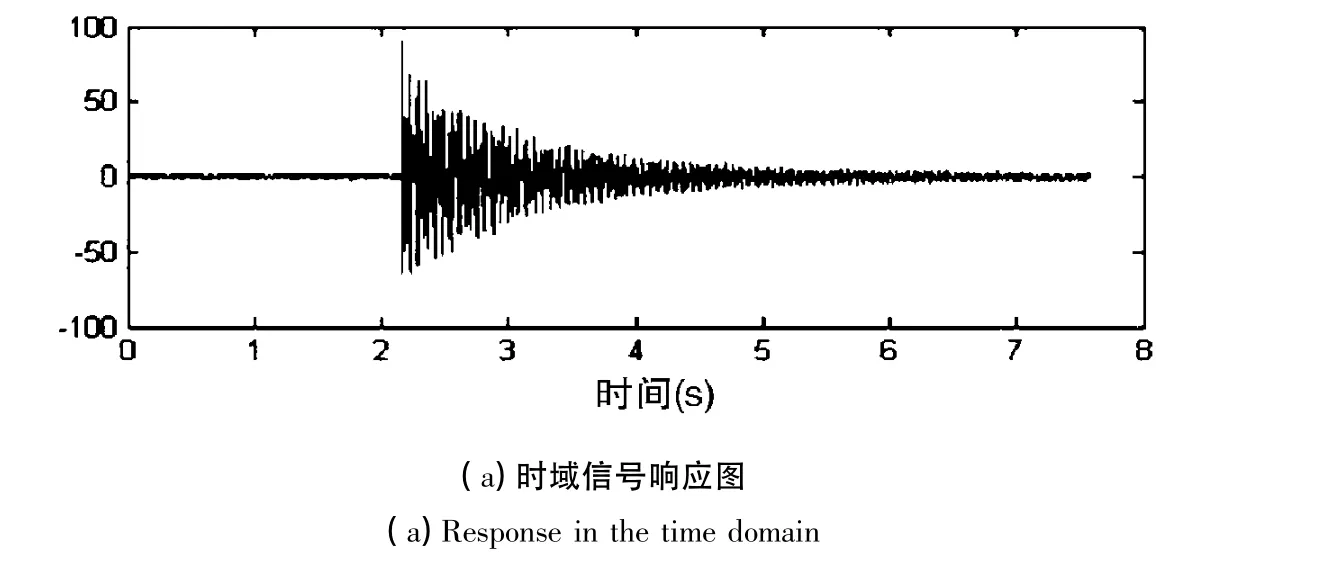
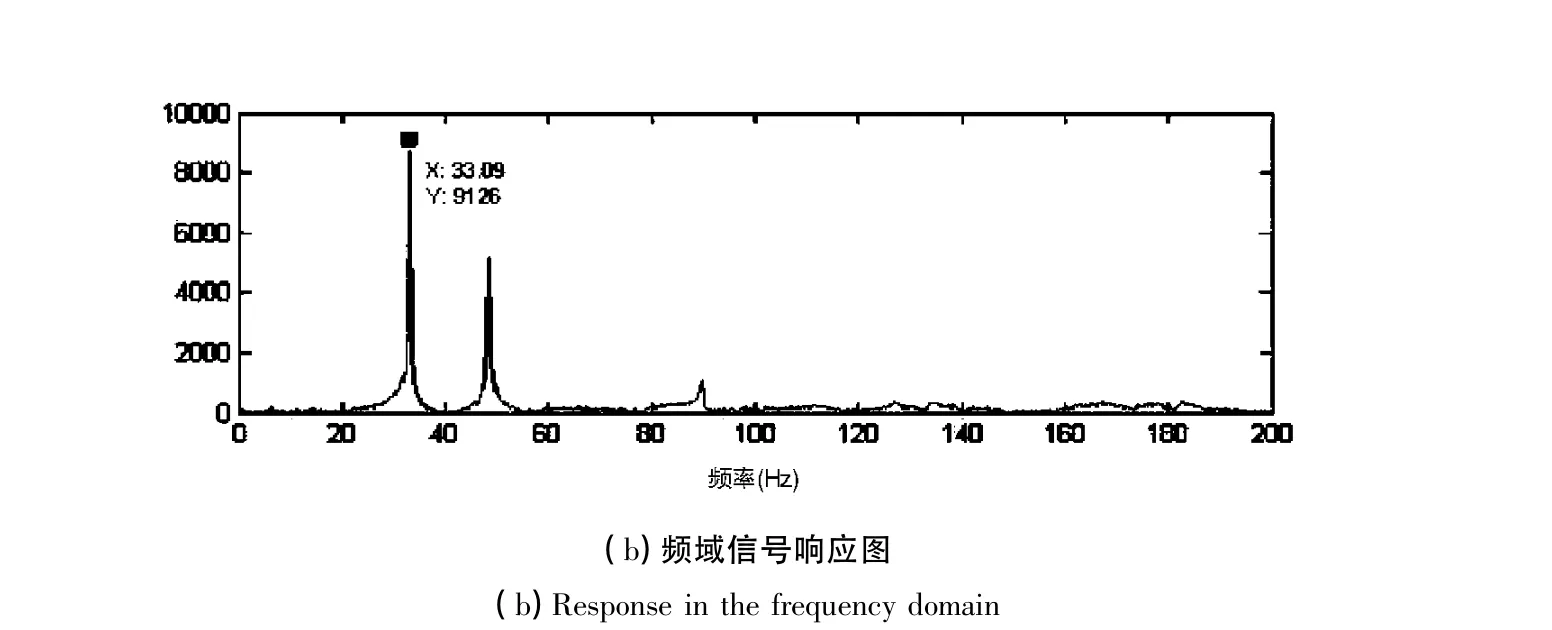
图7 8.148 kN索张力下FAST无线式索力传感器实验结果Fig.7 Test results of a wireless cable tension sensor with the cable tension at 8.148 kN
表1中的数据是同样大小索力下,有线式传感器与无线式传感器测得的振动一阶频率的对比。从实验结果可以看出,自制的FAST无线式索力传感器节点与东华测控的有线式传感器测量结果非常接近,在20 kN的索力范围内,最大误差只有0.28%。

表1 有线式传感器与无线式传感器测量结果对比Table 1 Comparison of the test results of a wired sensor and a wireless sensor
图8中3条曲线分别表示的是实验索公式、有线式传感器及无线式传感器在索受到不同张拉程度下,索力与一阶振动频率之间的对应关系。从图中可见,无线索力传感器,一阶振动频率与索力有较好的对应关系;但是实测结果与理论模型相差较大,对于1.53 m的试验索,在1.2 kN处,频率相差约8%。
导致理论模型与实测模型之间不一致性的可能原因有很多,主要原因是索刚度的影响,索长、索头的影响以及附加的连接件质量等的质量影响。文献[9]指出,对于60 m以上的中长索,采用简化公式可以取得较好的效果,而由于条件限制,实验所用的是不到2 m的超短索,所以实测结果与理论值存在着一定的误差。但是对于同一根索,通过多次实验的实验曲线可以看出,其索力与频率的对应关系非常一致,可以在后期通过更长的钢索的实验进行标定以综合修正公式,找到适合FAST索网结构的计算公式。
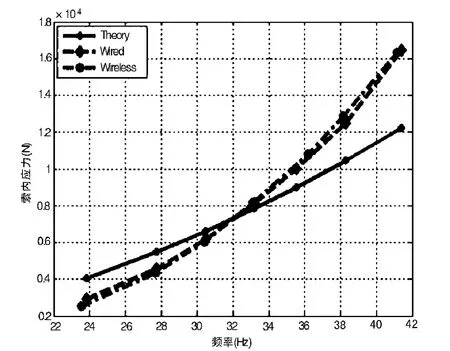
图8 1.53 m实验索索力与基频的理论与实测对比图Fig.8 Comparison between the theoretical and experimental results for a 1.53-meter-long cable
4 结论
根据FAST工程项目需求,设计制作了一种使用频率法测量FAST索单元应力的无线式传感器,并且在实验室平台进行了对比测试。实验结果表明,制作的无线索力传感器能够精确拾取振动信号,通过后期FFT变换,可以获得准确的索振动基频,满足频率法测量索力方式的信号采集功能。使用无线索力传感器,可以有效的降低成本,方便FAST项目建造过程中的索力监测任务,也可为望远镜运行阶段的设备健康监测提供一种合适的工具。
[1]赵清,王启明.FAST背架样机刚度实验分析 [J].科学技术与工程,2009,9(15):4431-4436.Zhao Qing,Wang Qiming.Stiffness Experiment on Prototype Back-structure of FAST [J].Science Technology and Engineering,2009,9(15):4431-4436.
[2]Nan R D.Five Hundred Meter Aperture Spherical Radio Telescope(FAST) [J].Science in China:Series G Physics,Mechanics& Astronomy,2006,49(2):129-148.
[3]钱宏亮,范锋,沈世钊,等.FAST反射面支承结构整体索网方案研究 [J].土木工程学报,2005,38(12):18-23.Qian Hongliang,Fan Feng,Shen Shizhao,et al.The Cable-net Structure Supporting the Reflector of FAST [J].China Civil Engineering Journal,2005,38(12):18 -23.
[4]中国科学院国家天文台.500米口径球面射电望远镜(FAST)项目初步设计(主动反射面分册),2008:30-31.
[5]卓新,毛海军,董石麟.预应力空间结构施工控制张力的逆向计算法 [J].施工技术,2004,33(11):4-5.Zhuo Xin,Mao Haijun,Dong Shilin.The Reverse Calculation Method of Tension Force Control in Construction of Prestressed Spatial Structures [J].Construction Technology,2004,33(11):4-5.
[6]金晓飞,范锋,沈世钊.FAST 30 m模型健康检测系统 [J].哈尔滨工业大学学报,2009,41(2):14-18.Jin Xiaofei,Fan Feng,Shen Shizhao.Health Monitoring System of FAST 30 m Model [J].Journal of Harbin Institute of Technology,2009,41(2):14 -18.
[7]王化杰.FAST健康监测数据采集系统的研究与开发 [D].哈尔滨:哈尔滨工业大学,2008:21-22.
[8]段波,曾德荣,卢江.关于斜拉桥索力测定的分析 [J].重庆交通学院学报,2005,24(4):6-12.Duan Bo,Zeng Derong,Lu Jiang.Analysis With Determining Cable Tension of Cable-stayed Bridges[J].Journal of Chongqing Jiaotong University,2005,24(4):6-12.
[9]许俊.斜拉索索力简化计算中的精度分析 [J].同济大学学报,2001,29(5):611-615.Xu Jun.Precision Analysis of Calculating Tension Force of Cable [J].Journal of Tongji University,2001,29(5):611 -615.
[10]史家钧,章关永.用随机振动法测量曼谷Rama IX斜拉桥的索力 [J].土木工程学报,1992,25(2):68-71.Shi Jiajun,Zhang Guanyong.Measuring Cable Tension of Cable-stayed Bangkok IX Bridge With Random Vibration Method [J].China Civil Engineering Journal,1992,25(2):68 -71.
[11]张亮.基于频率法的拉索索力自动测量技术研究 [D].重庆:重庆大学,2008:56-64.
[12]飞思卡尔半导体公司.MMA7260QT_datasheet.pdf[M].天津:飞思卡尔半导体公司,2008.
猜你喜欢
中国测试(2022年5期)2022-06-10
能源研究与利用(2022年1期)2022-03-03
科学技术创新(2021年15期)2021-06-25
航天制造技术(2020年5期)2020-11-10
天文学报(2020年5期)2020-09-28
甘肃科技(2020年13期)2020-08-25
科技视界(2020年19期)2020-07-30
空间电子技术(2020年6期)2020-03-04
中国科技信息(2015年16期)2015-11-17
军民两用技术与产品(2015年3期)2015-01-03
