
一种副反射面为椭球面的天线反射体测量技术
2022-06-10 12:16:20张新盼
中国测试 2022年5期
张新盼,许 谦
(1. 中国电子科技集团公司第三十九研究所,陕西 西安 710065; 2. 陕西省天线与控制技术重点实验室,陕西 西安 710065;3. 中国科学院新疆天文台,新疆 乌鲁木齐 830011)
0 引 言
新疆天文台26 m天线为多馈源、多频段天线,主反射面为标准抛物面形式,副反射面为非对称的椭球面。天线换馈功能的实现是通过副反射面背后的六杆联动机构转动,使副反射面卡式焦点以圆形轨迹移动,以匹配不同的馈源相心[1]。
在天线运行期间,副反射面随着六杆联动机构转动匹配相应馈源相心,需要保证副反射面电轴和天线主反射面电轴的同轴性。因此,在天线主反射面表、副反射面的表面准确度都满足指标要求的前提下,需要以天线馈源系统为基准,确定馈源系统、主反射面、副反射面之间精确的空间位置关系[2]。
1 测量内容和方案
1.1 数字工业摄影测量原理
数字工业摄影测量系统(简称摄影测量)测量原理的基本数学模型是共线方程,并且与双经纬仪测量系统一样,均是三角形交会法[3-4]。单台相机在不同位置拍摄多张照片,采用光束法平差解算相机间的相对位置和姿态参数[3-4]。摄影时被测点P、相机镜头中心S、像点p在同一直线上,如图1所示。

图1 共线方程示意图
图1中P1、P2为物方点P在两张像平面的投影点,S1S2为两张像平面的投影中心,O1、O2为两个摄影光轴与像平面的垂足,S1O1、S2O2为相机焦距f[3]。
像平面坐标系中像点的坐标为(x,y),像平面坐标系中像主点的坐标为(x0,y0),物方空间坐标系中被测点的坐标为(X,Y,Z),物方空间坐标系中镜头中心的坐标为(XS,YS,ZS),则共线方程式为[3-4]:
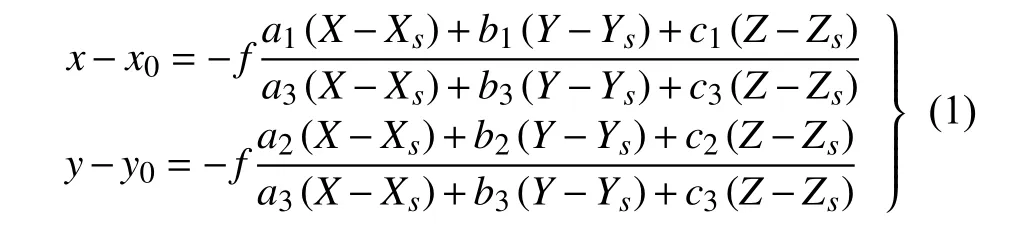
其中f为相机焦距。
像平面坐标系和物方空间坐标系的旋转矩阵为M[3],M中的9个元素为坐标系间三个旋转角ω、φ、κ的函数,不同的转角顺序各元素值不同,按照转角顺序为 ω、φ、κ,则:

单台相机在不同位置拍摄被测物2张以上的照片,根据三角形交会测量原理,经过摄影测量系统处理软件进行图像匹配、光束法平差等步骤后,提取精确的被测物三维坐标,如图2所示。摄影测量具有非接触、高准确度、高效率和适应恶劣环境的测量特点[3-5],在工业测量方向应用广泛,尤其是在天线主反射面表面准确度测量方向已经应用成熟[6-8]。

图2 单相机多摄站示意图
在新疆天文台南山站26 m天线测量任务中,选用德国AICON公司的3D Studio数字摄影测量系统,如图3所示,相机芯片尺寸28 mm、分辨率6 048像素4 032像素、相机焦距f=28.5 mm,其标称测量准确度 3 μm+(7·D) μm/m(D为摄影测量距离,单位m)。

图3 AICON数字摄影测量系统
1.2 主反射面表面准确度测量
主反射面表面准确度是保证天线系统电性能测试的主要机械指标,通常取天线最短工作波长的1/16~1/32。表面准确度反映了实际曲面位置相对于理论曲面的法向偏差程度,通常用反射面测量点法向偏差的均方根表示[10-14]。
建立用于主反射面表面准确度和副反射面空间姿态调整的天线系统坐标系O-XYZ,定义:面向主反射面,以馈源支套的上端法兰侧面圆周中心O为原点;X轴指向天线正上方;Z轴沿过O点与馈源支套的法兰上端面垂直的直线并指向副反射面;Y轴指向由右手坐标系法则确定[2,7-13],如图4所示。
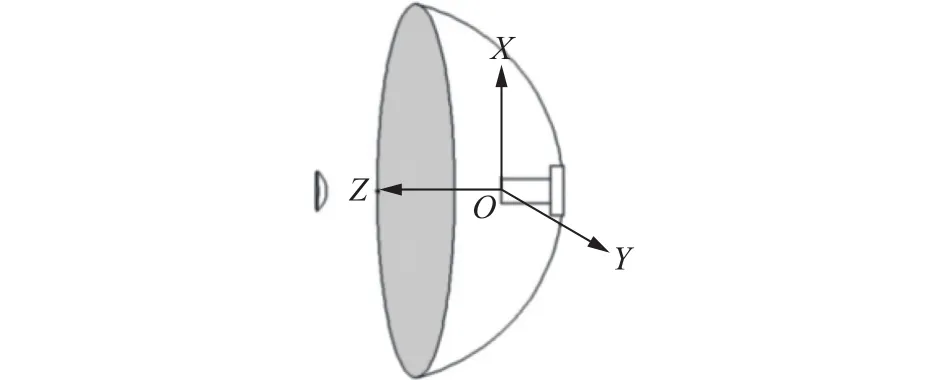
图4 天线系统坐标系O-XYZ
在天线反射体机械指标测量阶段,需要始终在统一的天线系统坐标系O-XYZ下进行,采用公共点坐标转换方法将每次测量点坐标转换至O-XYZ坐标系[2,7]。公共点要求均匀分布在坚实牢固的位置,根据馈源支套的结构形式进行分布,如图5所示,分布于馈源支套上、中、下三层共计25个。根据文献[15-16]研究表明公共点数目达到 6 个,增加公共点数量对转换参数解算稳定和解算准确度提高无显著影响。
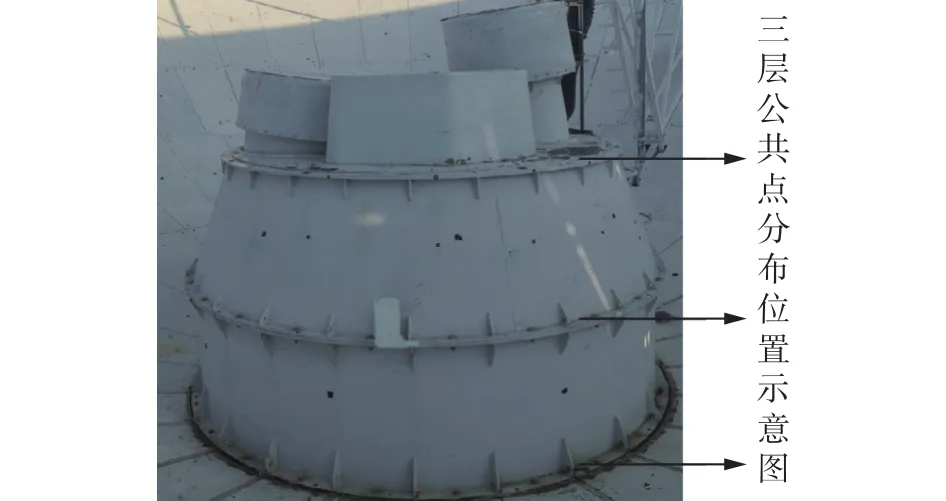
图5 天线系统坐标系公共点分布
应用摄影测量获取天线主反射面测量点在天线系统坐标系O-XYZ下的坐标,直接比对测量点实际位置相对于理论模型(IGES格式)的法向偏差,并统计全部测量点法向偏差的均方根值,即为天线主反射面表面准确度[2]。这样天线主反射面准确度满足指标的前提下,实际的主反射面电轴和馈源系统的机械中心轴完全重合,即确保了天线主反射面电轴和馈源系统电轴的同轴性。
1.3 副反射面表面准确度测量
该26 m天线的副反射面系统由副反射面和六杆联动机构组成,副反射面是非对称的椭球面形式,如图6所示,由9块面板拼接而成,可以看作是一个小口径的天线主反射面。在副反射面系统整体安装前,需要在地面进行副反射面表面准确度测量和调整工作。

图6 副反射面
天线运行后,六杆联动机构转动副反射面匹配不同的馈源相心,实现天线系统的换馈功能。因此,副反射面表面准确度达到指标要求的同时,需要保证副反射面电轴和六杆联动机构的旋转中心轴同轴。建立以旋转中心轴为基准的副反射面独立坐标系O1-X1Y1Z1,在此坐标系下进行副反射面表面准确度测量调整工作。
副反射面随六杆联动机构每旋转60°拍摄一组照片,共获取副反射面在6个旋装位置的数据。通过公共点坐标转换的方法将测量数据转换至同一工程,这样副反射面上每个测量点在6个旋转位置可拟合成一个圆周,圆周中心与六杆联动机构旋转中心轴同轴。副反射面独立坐标系o-xyz可定义为:以副反射面长轴最外沿处A1调整点的6个旋转位置拟合圆周圆心作为坐标系原点o,z轴沿过中心点o垂直于旋转圆周直线指向副反射面顶端,x轴指向副反射面起始位置时的A1点,y轴由右手坐标系法则确定,如图7所示。
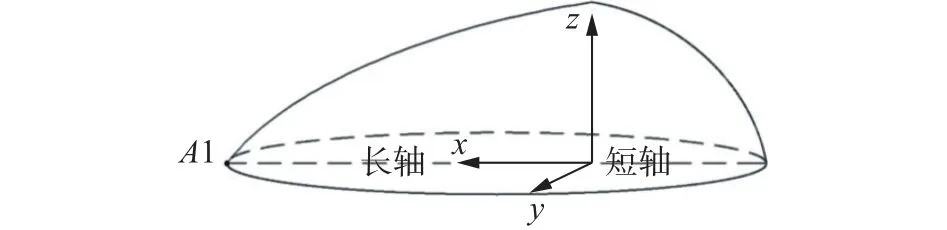
图7 副反射面独立坐标系o-xyz
每次采集副反射面测量点数据,通过公共点转换至o-xyz坐标系下。副反射面表面准确度的计算与1.2节中主反射面表面准确度计算方法相同。
1.4 主、副反射面电轴同轴度
副反射面空间位置主要是指副反射面电轴和主反射面电轴的同轴度,即副反射面电轴两个端点在天线系统坐标系O-XYZ下的坐标值X、Y趋近于0。副反射面电轴定义:过圆心o做旋转圆周的垂线,与副反射面顶部一点6个旋转位置拟合所得平面相交于点p,则op的连线即为副反射面电轴L,如图8所示。在副反射面独立坐标系o-xyz下,副反射面电轴L的两个端点o、p坐标值分别为o(0,0,0)(mm)、p(0.10,0.02,595.48)(mm)。

图8 副反射面电轴和端点示意图
2 数据处理及结果
第一次主反射面测量时,根据1.1节的定义建立天线系统坐标系O-XYZ,后期每次测量数据均通过公共点坐标转换的方法恢复至该坐标系下。公共点坐标转换准确度通常是以转站前后公共点坐标偏差的均方根值(RMS)进行评价[2,14-17],公共点坐标转换准确度为Δλ=0.14 mm,如表1所示。

表1 公共点坐标转换准确度
副反射面系统完成安装后,倒置于副反射面撑腿顶部,其曲面朝向主反射面,在测量副反射面空间位置时,副反射面曲面不便于测量。因此在地面上测量副反射面表面准确度时,需要将副反射面电轴L的两个端点通过公共点转换方法,转换到副反射面中心体根部和副反射面面板边缘。副反射面电轴公共点分布位置,如图9所示。

图9 副反射面电轴公共点分布
测量主反射面表面准确度时,同时测量副反射面电轴公共点,从而获取副反射面电轴L在天线系统坐标系O-XYZ下的姿态,通过副反射面六杆联动机构伸缩杆长使副反射面电轴和主反射面电轴趋近重合。
经过四次摄影测量和三次调整主反射面单块面板背后的调整螺栓长度,最终表面准确度优于±0.3 mm,如表2所示。

表2 主反射面表面准确度
副反射面表面准确度优于±0.11 mm,如表3所示。

表3 副反射面表面准确度
按照1.3节副反射面电轴调整方案,经过三次调整副反射面电轴和主反射面电轴同轴度优于0.5 mm。副反射面电轴端点在天线系统坐标系OXYZ下的坐标,如表4所示。

表4 副反射面电轴端点坐标
3 电性能测试
在完成天线主反射面表面准确度、副反射面表面准确度和副反射面空间位置等机械指标的调整后,进行天线电气性能指标测试。
首先,副反射面对准S频段信号接收馈源,实际测试天线系统在方位方向和俯仰方向接收S频段信号的电性能方向图,如图10、图11所示。
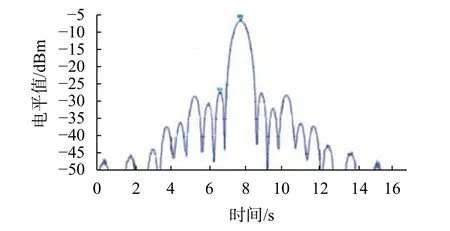
图10 S频段方位方向图

图11 S频段俯仰方向图
其次,旋转副反射面使其对准X频段信号接收馈源,实际测试天线系统在方位方向和俯仰方向接收X频段信号的电性能方向图,如图12、图13所示。
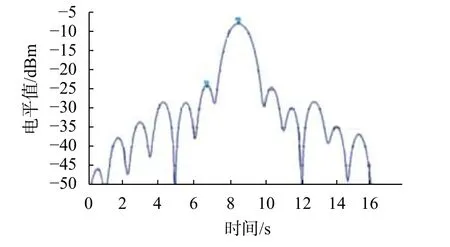
图12 X频段方位方向图
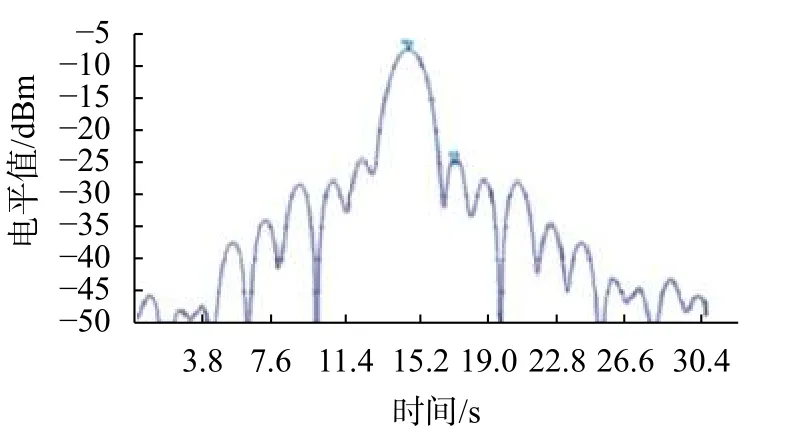
图13 X频段俯仰方向图
4 结束语
综上所述,从电性能测试方向图,可以看出S/X频段信号测试的电气增益和旁瓣满足指标要求。因此,数字工业摄影测量系统在天线测量领域的应用,不仅可以满足主反射面表面准确度的测量,在确定天线系统的馈源、主反射面、副反射面空间位置关系方面的应用更好地满足天线系统综合电气性能指标的测试需求。另外,针对椭球形、非对称、可旋转的曲面表面准确度测量、调整,需要以其旋转中心轴为基准。
猜你喜欢
中国循证心血管医学杂志(2021年2期)2021-04-07 01:16:18
今日中国·西班牙文版(2021年2期)2021-03-04 06:45:52
航天制造技术(2020年5期)2020-11-10 08:46:38
天文学报(2020年5期)2020-09-28 02:08:34
科技传播(2019年22期)2020-01-14 03:06:28
科教新报(2019年16期)2019-09-10 01:50:38
科学导报(2019年24期)2019-09-03 04:33:02
实用心电学杂志(2019年5期)2019-02-11 12:03:19
测绘科学与工程(2016年5期)2016-04-17 06:51:15
无线电通信技术(2015年3期)2015-12-23 11:37:02
